


ExoMars software består ESA Mars Yard køreprøve
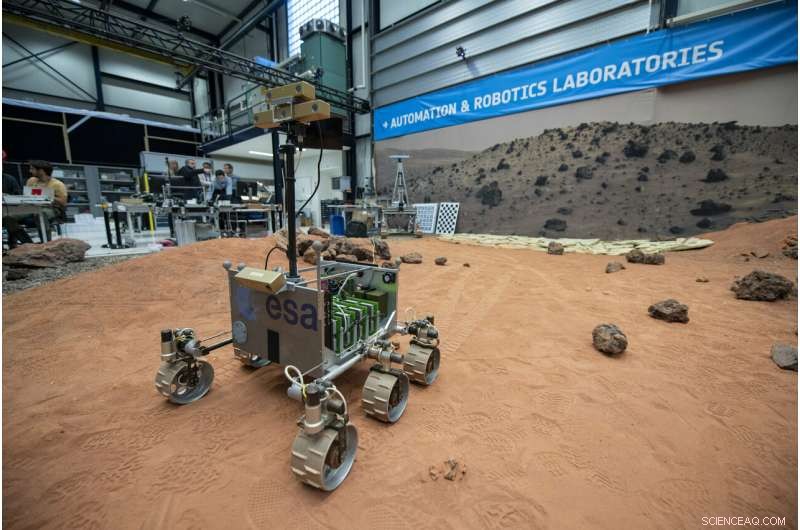
En halvskala version af ExoMars rover, kaldet ExoMars Testing Rover (ExoTeR), set manøvrere sig forsigtigt gennem de røde klipper og sand på 9x9 m Planetary Utilization Testbed, en del af ESA's Planetary Robotics Laboratory i dets ESTEC tekniske center i Holland, som en test af autonom navigationssoftware bestemt til ESA's ExoMars 2020-mission til den røde planet. Kredit:ESA–G. Portør, CC BY-SA 3.0 IGO
Navigationssoftware bestemt til ExoMars 2020-missionen til den røde planet har bestået en rover-baseret køreprøve på ESA's 'Mars Yard'.
ESA's ExoMars-rover vil køre til flere steder og bore ned til to meter under overfladen af Mars på jagt efter spor til tidligere liv, der er bevaret under jorden.
En halvskala version af ExoMars rover, kaldet ExoMars Testing Rover (ExoTeR), manøvrerede sig forsigtigt gennem de røde klipper og sand på den 9 x 9 m 'Planetary Utilization Testbed', kaldet Mars Yard, del af ESA's Planetary Robotics Laboratory ved ESTEC i Holland.
Omhyggeligt at beregne dens videre rute, ExoTeR udviklede sig med en hastighed på 2 m i minuttet – stadig flere gange hurtigere, end den faktiske ExoMars rover vil køre, som vil fremskride med 100 m pr. Mars-dag.
Den to-dages rover-test blev udført af ESAs robotingeniører, sluttet sig til et hold fra Frankrigs rumagentur CNES i Toulouse. De har mere end to årtiers erfaring med autonom navigation for planetariske rovere, kulminerede i udviklingen af 'AutoNav'-pakken af software, der stod for kørsel.
I løbet af 2017 blev ExoTeR videregivet til ALTEC i Italien, stedet for ExoMars' roverovervågnings- og kontrolcenter, at tillade kontrolholdet at træne med den avancerede rover. I december, roveren vendte tilbage til ESTEC for en opgradering til dens autonome navigationsalgoritme.
Navigationstesten fulgte, bekræfter, at softwaren fungerede godt. Næste ExoTeR vender tilbage til Italien, tillader ALTEC-kontrolteamet at få erfaring med at arbejde med den ekstra funktionalitet af autonom navigation.
Den enorme afstand fra Jorden til Mars svarer til en signalforsinkelse på mellem fire og 24 minutter, gør direkte kontrol af ExoMars upraktisk. I stedet vil roveren være i stand til at træffe nogle af sine egne beslutninger.
"I stedet for at sende fuldstændige farefrie baner, som roveren skal følge, autonom navigation giver os mulighed for kun at sende det et målpunkt, " forklarer ESA's robotingeniør Luc Joudrier.
"Roveren opretter et digitalt kort over dens nærhed og beregner, hvordan den bedst når det målpunkt. Når den ser på kortet, forsøger den at placere roveren på alle disse tilstødende steder for at finde ud af, om roveren ville være sikker i hver af disse positioner – eller hvis klipperne er for høje eller terrænet for stejlt.

En halvskala version af ExoMars rover, kaldet ExoMars Testing Rover (ExoTeR), bliver brugt til at teste CNES-udviklet autonom navigationssoftware i de røde klipper og sand på 9x9 m Planetary Utilization Testbed, en del af ESA’s Planetary Robotics Laboratory i dets ESTEC tekniske center i Holland. Kredit:ESA–G. Portør, CC BY-SA 3.0 IGO
"Ved at arbejde fra det lokale navigationskort, roveren beregner den sikre vej mod målet og begynder at bevæge sig langs et segment af den beregnede vej, i slutningen af segmentet gentager den den samme kortlægningsproces for at komme videre.
"Det ligner et menneske, der går. Vi ser fremad for at bestemme, hvor vi skal hen, men mens vi går, kigger vi ned for vores fødder og ændrer om nødvendigt kurs for at undgå forhindringer. Når vi har valgt en vej uden forhindringer, vi sørger for, at vi følger den vej for at forblive sikre."
ExoTeR roveren, ligesom ExoMars rover selv, er udstyret med mastmonterede stereonavigationskameraer til digital højdekortlægning. Og mens den kører fremad, den kontrollerer konstant dens fremskridt ved hjælp af et par kameraer i dets frontchassis.
Denne vision-baserede bevægelsessporing fungerer bedre end blot at måle drejningen af roverens hjul, fordi den giver controllere mulighed for at tage højde for enhver hjulslip – rovere på Mars er tidligere blevet fanget i dybt sand, og fortsat hjuldrejning kan faktisk grave dem dybere ind.

ExoTeR roveren, ligesom ExoMars rover selv, er udstyret med mastmonterede stereonavigationskameraer til digital højdekortlægning. Kredit:ESA–G. Porter, CC BY-SA 3.0 IGO
ExoTeR roveren, komplet med opdateret software, er nu klar til at vende tilbage til ALTEC i Italien, giver kontrolteamet mulighed for at få erfaring med den ekstra funktionalitet af autonom navigation, før ExoMars' flyvesoftware færdiggøres.
ExoMars' sidste flyvesoftware vil faktisk bære to sæt autonom navigationssoftware, med en anden udviklet af Airbus i Stevenage, Storbritannien.
"Kombinationen skulle give roveren ekstra fleksibilitet, " siger Luc. "Ideen er, at man kan vise sig at præstere bedre i vanskeligere terræn, mens den anden kunne bevæge sig hurtigere langs lettere terræn."
Sidste artikelSåning af Mælkevejen med liv ved hjælp af Genesis-missioner
Næste artikelEuropæere overvejer månemission i 2025
 Varme artikler
Varme artikler
-
 Kvasarer som de nye kosmiske standardlysKvasaren 3C 273 med dens jetfly, som set af Chandra X-ray Observatory. Astronomer har fundet ud af, at kvasarernes røntgen- og ultraviolette lysstyrker er så tæt korrelerede, selv for kvasarer på stor
Kvasarer som de nye kosmiske standardlysKvasaren 3C 273 med dens jetfly, som set af Chandra X-ray Observatory. Astronomer har fundet ud af, at kvasarernes røntgen- og ultraviolette lysstyrker er så tæt korrelerede, selv for kvasarer på stor -
 Nye målinger af solspektret bekræfter Einsteins teori om generel relativitetKunstnerisk fremstilling af solen, Jorden og Månen (ikke i skala) med rum-tids-krumningen af Einsteins Generelle Relativitet over spektret af sollys reflekteret fra Månen (i farver fra blå til rød).
Nye målinger af solspektret bekræfter Einsteins teori om generel relativitetKunstnerisk fremstilling af solen, Jorden og Månen (ikke i skala) med rum-tids-krumningen af Einsteins Generelle Relativitet over spektret af sollys reflekteret fra Månen (i farver fra blå til rød). -
 Åndbare atmosfærer kan være mere almindelige i universet, end vi først troedeKredit:Studio23/Shutterstock Eksistensen af beboelige fremmede verdener har været en grundpille i populærkulturen i mere end et århundrede. I det 19. århundrede, astronomer troede, at marsboere
Åndbare atmosfærer kan være mere almindelige i universet, end vi først troedeKredit:Studio23/Shutterstock Eksistensen af beboelige fremmede verdener har været en grundpille i populærkulturen i mere end et århundrede. I det 19. århundrede, astronomer troede, at marsboere -
 2 amerikanske astronauter går om bord på SpaceX-raketten til historisk opsendelseNASA-astronauterne Douglas Hurley, venstre, og Robert Behnken vinker, mens de går ud af Neil A. Armstrong Operations and Checkout Building på vej til Pad 39-A, ved Kennedy Space Center i Cape Canavera
2 amerikanske astronauter går om bord på SpaceX-raketten til historisk opsendelseNASA-astronauterne Douglas Hurley, venstre, og Robert Behnken vinker, mens de går ud af Neil A. Armstrong Operations and Checkout Building på vej til Pad 39-A, ved Kennedy Space Center i Cape Canavera
- Åbne data hjælper videnskabsmænd med at optrevle jordens systemer
- Hvis en art ikke har en stor nok genpulje,
- På trods af negative konsekvenser, velvillig sexisme hjælper i søgen efter partner
- Sådan laver du en plantecellemodel ved hjælp af en shoebox
- Vil den globale opvarmning bringe en ændring i vinden? Støv fra det dybe hav giver et fingerpeg
- Zuckerberg ser fremskridt for Facebook efter et tumultarisk år