


Videnskab i bevægelse for ExoMars tvillingerover
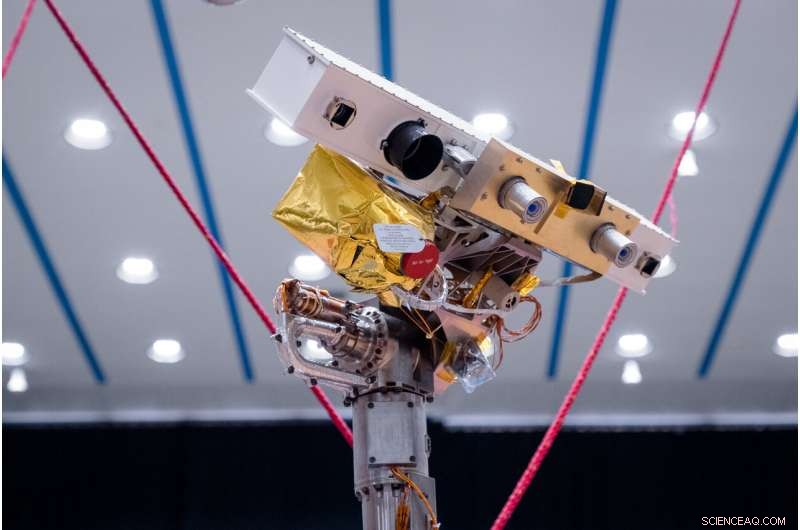
To stereokameraer i toppen og i bunden af roverens mast - NavCam og LocCam - gør det muligt for GTM at 'se' i tre dimensioner og identificere klipperne og skråningerne forude. Kameraerne leder roveren gennem sikre stier og hjælper med at undgå farer. Kredit:Thales Alenia Space
De første videnskabelige test for ExoMars rover-replika startede efter flere ugers køreprøver omkring Mars Terrain Simulator i ALTEC-lokalerne i Torino, Italien.
Med bevægelsessystemet oppe og køre, det er nu tid for roverens kameraer og instrumenter til at scanne et Mars-lignende terræn – både på og under overfladen – i jagten på de bedste prøver.
Tvillingen til ESA's Rosalind Franklin rover, også kendt som The Ground Test Model (GTM), har haft travlt med at opmåle 64 kvadratmeter terræn i en af Europas største Mars-værfter, omhyggeligt iscenesat med sandede områder og klipper i forskellige størrelser, samt gravitations- og lyssimuleringer for at genskabe miljøet på Mars.
Se, snap, undersøgelse
Billedbehandling kommer først. To stereokameraer i toppen og i bunden af roverens mast – NavCam og LocCam – gør det muligt for GTM at 'se' i tre dimensioner og identificere stenene og skråningerne forude. Kameraerne leder roveren gennem sikre stier og hjælper med at undgå farer.
Når roveren er på farten, yderligere to sæt kameraer – PanCam og CLUPI – kommer i spil for at få et helt billede af webstedet med højopløsningsbilleder. Disse rover-øjne sender panorama- og nærbilleder af terrænet til operatørerne ved Rover Operations Control Center (ROCC). Hold fra Thales Alenia Space og ALTEC arbejdede i synergi med ESA-ingeniører.
Billederne er essentielle for at kortlægge den geologiske kontekst og for at hjælpe forskerne med at beslutte, hvor roveren skal stoppe og undersøge overfladen mere detaljeret.
At vælge målet
At finde egnede prøver involverer meget mere end blot at spotte et fremspring og grave. Roveren er udstyret med en jordgennemtrængende radar – WISDOM – og en neutrondetektor – ADRON – for at forstå, hvad der gemmer sig under overfladen.
Søgningen efter beviser på liv på Mars er et hovedformål med ExoMars 2022-missionen.
Hvis nogen steder på Mars, spor af tidligere eller nuværende liv er mest sandsynligt at finde under jorden, hvor ældgamle biologiske signaturer stadig kan være bevaret fra den hårde stråling på den røde planet.
Ligesom arkæologer på jorden udgraver steder, VISDOM kan arbejde ved at analysere området på en gittermåde - ved at bryde jorden op i små firkanter. Neutronspektrometeret i ADRON vil arbejde sammen med radaren for at detektere vand og hydrerede mineraler under overfladen.

ExoMars-missionen vil se roveren Rosalind Franklin lande på den røde planet i 2023. Rosalind roveren har seks hjul og en unik måde at bevæge sig henover den røde planet på. Hvert hjulpar er ophængt på en drejelig bogie, så hvert hjul kan styres og køres uafhængigt. Replikaen ExoMars rover - Ground Test Model (GTM) - der vil blive brugt i Rover Operations Control Center til at understøtte missionstræning og operationer, gennemfører adskillige køreprøver omkring Mars Terrain Simulator. Dette billede viser GTM, der kører gennem ujævnt terræn. Kredit:Thales Alenia Space
Testcases for Mars
Operatører øver alle mulige missionsscenarier for at forberede Rosalind Franklins ankomst til Oxia Planum på Mars i juni 2023.
De første tests med videnskab i aktion startede med, at roveren kørte en travers for at karakterisere et sandet og fladt område. Efter et stykke tid, kameraerne fodrede operatørerne med stereobilleder og billeder i høj opløsning.
Når et sted, der anses for spændende nok til at bore efter prøver, er fundet, det var tid til at få mere information fra under overfladen.
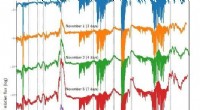
Den jordgennemtrængende radar WISDOM kørte sin videnskabelige analyse hver 10. cm i 30 sekunder. Da laboratoriet med hjul dækkede fem meter, den udførte to drejninger på 90 grader og startede forfra på en ny fem meter bane. I slutningen af testen, WISDOM scannede et gitter på 25 kvadratmeter.
En anden test gentog denne sekvens, denne gang med en meget længere køretur på otte meter til en mere vidtrækkende videnskabserhvervelse. Og i stedet for at stoppe hver halve meter, GTM brugte WISDOM hver meter.
I begge tilfælde sekvensen blev fuldført af neutrondetektoren, Adron, som tog målinger og ledte efter spor af vand. Dernæst var udførelsen af et komplet WISDOM-gitter på 25 kvadratmeter.

Replikaen ExoMars rover – Ground Test Model (GTM) – der vil blive brugt i Rover Operations Control Center til at understøtte missionstræning og operationer under tests omkring Mars Terrain Simulator i juli 2021. Dette billede viser roveren når en lille bakke i Mars terrænsimulatoren. Kredit:Thales Alenia Space
Hvor skal man bore?
Disse tørløb simulerer de sekvenser roveren vil følge på Mars, hvor forskerne skal beslutte, hvilket område der er værd at bore. Rosalind Franklin er udstyret med en boremaskine til at udtage prøver ned til maksimalt to meter, dybere end nogen anden rover og en første i Mars-udforskning.
Som en bonus under dette første videnskabelige tørløb, roveren forsøgte at bore i forskellige dybder og gennem et lag prøvemateriale udvalgt af ExoMars-teamet.
På Mars, prøven indsamlet af boret vil blive knust til et fint pulver og leveret til det analytiske laboratorium i hjertet af roveren for at analysere dens mineralogi og kemi.
Uden sommerferie for roveren, kommende test på Mars Terrain Simulator vil involvere analyse af prøver inde i roverens analytiske laboratorium. En række instrumenter - MicroOmega, Raman og MOMA - vil studere jordens mineralogiske og molekylære sammensætning.
Under den rigtige mission til den røde planet, resultaterne af denne analyse kunne besvare spørgsmål om den potentielle oprindelse, evolution og fordeling af liv på Mars
 Varme artikler
Varme artikler
-
 Astronomer observerer nova V659 Sct under udbrudSeks spektre af Nova V659 Sct observeret i HEROS-spektrografens røde kanal. Datoer er 2019, og de tilsvarende dage efter fund er angivet i parentes. Brede bånd af telluriske linjer er til stede i dett
Astronomer observerer nova V659 Sct under udbrudSeks spektre af Nova V659 Sct observeret i HEROS-spektrografens røde kanal. Datoer er 2019, og de tilsvarende dage efter fund er angivet i parentes. Brede bånd af telluriske linjer er til stede i dett -
 Tusmørkeobservationer afslører en enorm storm på NeptunBilleder af Neptun taget under tusmørkeobservation afslørede et ekstremt stort lyst stormsystem nær Neptuns ækvator (mærket skykompleks i den øverste figur), et område, hvor astronomer aldrig har set
Tusmørkeobservationer afslører en enorm storm på NeptunBilleder af Neptun taget under tusmørkeobservation afslørede et ekstremt stort lyst stormsystem nær Neptuns ækvator (mærket skykompleks i den øverste figur), et område, hvor astronomer aldrig har set -
 Fra gammastråler til røntgenstråler:Ny metode identificerer tidligere ubemærket pulsaremissionObservationer af PSR J1826-1256 – en radiostille gammastrålepulsar – opnået med ESAs XMM-Newton røntgenobservatorium. Forskere opdagede røntgenpulserende emission fra denne og to lignende kilder ved h
Fra gammastråler til røntgenstråler:Ny metode identificerer tidligere ubemærket pulsaremissionObservationer af PSR J1826-1256 – en radiostille gammastrålepulsar – opnået med ESAs XMM-Newton røntgenobservatorium. Forskere opdagede røntgenpulserende emission fra denne og to lignende kilder ved h -
 Kina taler med European Space Agency om måneudposti denne tirsdag, 15. november kl. 2016, fil foto, månen stiger over et logo for AVIC eller Aviation Industry Corp i Beijing, Kina. Kina taler med den europæiske rumfartsorganisation om at samarbejde o
Kina taler med European Space Agency om måneudposti denne tirsdag, 15. november kl. 2016, fil foto, månen stiger over et logo for AVIC eller Aviation Industry Corp i Beijing, Kina. Kina taler med den europæiske rumfartsorganisation om at samarbejde o
- Lab eksperimenter med pulserede ionstråler afslører strålingsskadeprocesser i silicium
- Forskere finder vand i prøver fra asteroiden Itokawa
- En sikker og effektiv måde at blege tænder på
- Hvordan usynlighedskapper fungerer
- Metasurface-teknologi kunne fremme jordvidenskaben fra kredsløb
- Sådan stiler du en Cricket