


Forsker gennemgår nøgleteknologierne til rumbaseret situationsbevidsthed
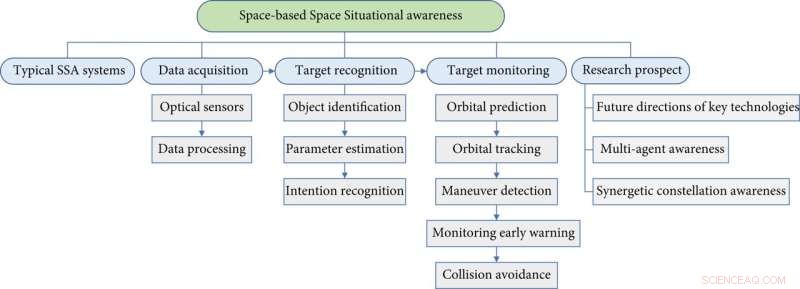
Gennemgået komponenter af rumbaseret situationsbevidsthed. Kredit:Rum:Videnskab og teknologi
Siden opsendelsen af den første menneskeskabte jordsatellit har antallet af rumobjekter været hastigt stigende. Ifølge de autoritative statistikker fra NASA eksisterede der stadig over 6.400 kredsende rumfartøjer indtil begyndelsen af 2021. Desuden har det samlede antal raketaffald over 10 cm oversteget 16.000. Rummiljøet er blevet meget overbelastet på grund af det stigende rumaffald, hvilket alvorligt truer sikkerheden for kredsende rumfartøjer.
Rumbaseret situationsbevidsthed, som en omfattende evne til trusselsviden, analyse og beslutningstagning, er af betydning for at sikre rumsikkerhed og opretholde normal orden. Forskellige rumsituationsbevidsthedssystemer er blevet designet og lanceret. Dataindsamling, målgenkendelse og overvågning, der udgør nøgleteknologier, yder store bidrag, og forskellige avancerede algoritmer udforskes som teknisk support.
Omfattende anmeldelser af disse teknologier og specifikke algoritmer dukker dog sjældent op. Dette er til ulempe for den fremtidige udvikling af rumsituationsbevidsthed. I et reviewpapir, der for nylig er offentliggjort i Space:Science &Technology , Shuang Li fra College of Astronautics, Nanjing University of Aeronautics and Astronautics, gennemgik og analyserede forskningsfremskridt inden for nøgleteknologier til rumsituationsbevidsthed, indikerede de fremtidige retninger for nøgleteknologierne og understregede forskningsmulighederne for multiagent- og synergetiske konstellationsteknologier for fremtiden situationsbevidsthed, der sigter mod at give referencer til rumbaseret situationsbevidsthed for at realisere rummets bæredygtighed.
Først og fremmest blev typiske systemer, der er tilgængelige til langdistancebevidsthed, gennemgået. USA har i høj grad bidraget til at udvikle SSA-systemerne. Specifikt har Geosynchronous Space Situational Awareness Program (GSSAP) til formål at styrke geosynkron situationsbevidsthed. Dette system kan identificere konkrete funktioner til at skelne og karakterisere forskellige mål.
Det rumbaserede overvågningssystem (SBSS) har højere muligheder for dataindsamling, identifikation og sporing på rumaffald. Desuden indeholder konstellationen Space-Based Infrared System (SBIRS) fire satellitter og infrarøde nyttelaster i høje kredsløb. 24 satellitter er fordelt i Space Tracking and Surveillance System (STSS), hvilket yderligere udvider dækningen af SBIRS. STSS har stærkere evner til orbital sporing og manøvredetektion i komplicerede situationer. James Webb Space Telescope (JWST) integrerer desuden et teleskop med nær- og midinfrarøde kameraer til ultra-fjern billedoptagelse og målovervågning.
Lav vægt, præcis og bred observation er de væsentlige fordele ved JWST. Efter USA styrker Den Europæiske Union eftertrykkeligt viden og evner til tidlig varsling i SSA og etablerer dual-mode detektionssystemet. Rusland har gjort fremskridt inden for sporing af affald, tidlig advarsel og miljøovervågning, hvilket har skabt trækronesystemet. Samlet set dukker der konstant avancerede rumbaserede situationsfornemmelsessystemer op i USA og andre lande.
Ikke desto mindre, i betragtning af det store strømforbrug af rumbaserede enheder og ukoordinerede databehandlingsmetoder, er de nuværende SSA-systemer begrænset af antallet af detektorer, detektionskapaciteter og placeringsfordeling, og har således kun samtidig visse funktioner. I dette tilfælde kan systemerne ikke realisere nøjagtig bevidsthed om alle rummål i realtid, men kun for opgavekrav. Derfor bliver det rumbaserede SSA's omfattende situationsfornemmelsesevne en nødvendighed.
Bagefter gennemgik og diskuterede forfatteren karakteristika ved optiske sensorer og behandlingsteknologier, som spiller en rolle for nøjagtigt at indhente data fra rummål. Med fordelene ved høj følsomhed, hurtig transmission og stærk anti-interferens, anvendes optiske sensorer til den rumbaserede situationsbevidsthed som samlere af objektdata. Hvad angår databehandling, repræsenterer den teknologien til behandling og analyse af store rumlige data, der konverterer dem til målenes nøgleinformation. Men de stigende risikable mål øger kravene til behandling af massive data, og det påvirker også nøjagtigheden og aktualiteten af situationsfornemmelse. Således bliver datalagring, filtrering og fusion gennemgået og diskuteret i rækkefølge.
Derefter præsenterede og analyserede forfatteren teknologierne til målgenkendelse. For det første var objektidentifikation kernedelen af målgenkendelse i den rumbaserede situationsbevidsthed. Laserradarer havde været dominerende i objektidentifikation som sensorer, mens maskinsyn og ANN var meget udforsket som avancerede identifikationsalgoritmer. For det andet, parameterestimering, som en væsentlig betingelse for at opnå den nøjagtige information om rumobjekter, skal parameterestimering udføres i SSA efter objektidentifikation.
Forskellige parameterestimeringsteknologier for rumobjekter er hidtil blevet udnyttet. Fotometriske teknologier var blevet mere modent udviklet, mens optimale estimeringsteknologier producerede avancerede algoritmer inden for kunstig intelligens. For det tredje var intentionsgenkendelse processen med intentionsbevidsthed og adfærdsslutning af rumobjekter gennem observerede handlinger og effekter på situationerne, hvilket var afgørende for at forbedre kvaliteten af information om tidlig varsling og reducere antallet af advarsler og dermed garantere sikkerhed. Sammenlignet med de modne objektidentifikationsteknologier kræver intentionsgenkendelse imidlertid dybere forskning.
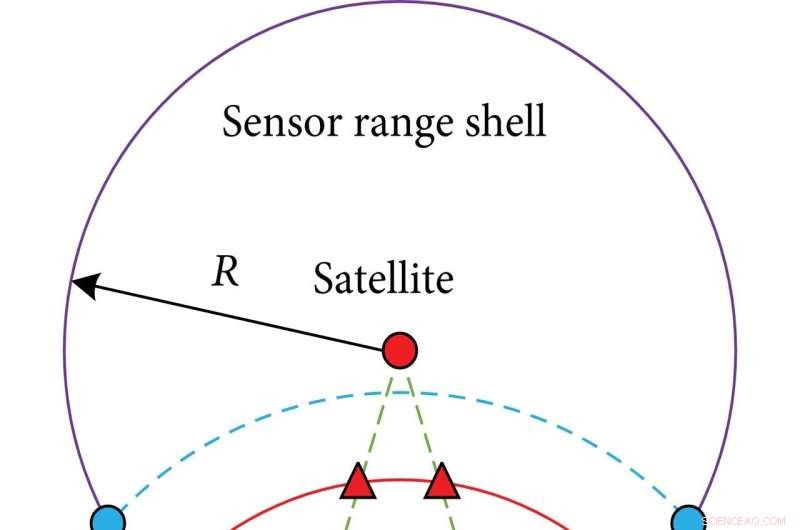
Geometri af dobbelt-højdebånds ATH-dækning for en enkelt satellit, skraveret område. Kredit:Rum:Videnskab og teknologi
Desuden diskuterede forfatteren udviklingen af målovervågningsteknologien. I den stabile periode lagde målovervågningsteknologierne vægt på forudsigelse af kredsløb, sporing og manøvredetektion, mens tidlig varsling og undgåelse af kollisioner dominerede den risikable periode.
(1) Orbital forudsigelse af rummål, som grundlaget for kollisionsadvarselsmekanismer og satellitmålings- og kontrolteknologi, var blevet et forskningshotspot inden for SSA-området. Ikke desto mindre er begrænsningerne for nuværende orbital forudsigelsesmetoder den lave nøjagtighed af dynamiske målmodeller, sensormålinger og orbitalbestemmelse. For eksempel genererede atmosfæremodstandsmodeller stor usikkerhed for kredsløbsforudsigelsen i lave jordbaner. Således har forfatteren c orbital forudsigelsesmetode baseret på analytiske forudsigelsesmodeller og maskinlæringsalgoritmer.
(2) Orbitalbestemmelse og sporing var begge vigtige dele af målovervågningen. De havde været tæt forbundet, hvor kredsløbsbestemmelse var forudsætningen og kredsløbssporing var det udførende formål. Ikke desto mindre er kun synslinje-observationen fra de optiske sensorer til målene tilgængelig uden afstandsinformation. I betragtning af, at antagelserne alle er opfyldt, inklusive lineær dynamik, friløbsflyvning, enkelt sensor og sensoren fast i centrum af massen, har den velkendte orbitalbestemmelse kun med vinkler behov for løsninger på manglen på observerbarhed af rækkevidde. Forfatteren diskuterede således udviklingen af Angles-Only Deermination Algorithms og en række forbedrede Filter Tracking Algorithms.
(3) Detektering af rumobjekters manøvrer med historiske data, der kan hentes, er blevet en væsentlig mission i SSA, især for aktive objekter uden tilgængelig operationel information. Realtidsdetektering er påkrævet for at reagere tilstrækkeligt på eventuelle uregelmæssigheder i rumfartøjer og mulige trusler mod nærliggende rumaktiver. De aktive objekters manøvrer detekteres og registrerer mønstre og tendenser i manøvretyper og størrelser. Forfatteren diskuterede således udviklingen af algoritmerne for karakterisering af følsomme parametre og algoritmerne for fælles måling og behandling.
(4) Overvågningsteknologier til tidlig varsling besad betydelige fordele ved brede overvågningsområder, forskellige sporingsmidler og høj advarselsnøjagtighed. Derfor var tidlig varsling lovende som den almindelige retning, og de fremtidige tendenser fokuserer på de rumbaserede asteroidevarslingsprojekter og forbedringerne af aktualitet, nøjagtighed og tillid.
(5) Efter at have modtaget den tidlige advarsel om rumaffald og asteroider, var en vital del af SSA at forudsige og undgå satellitkollisioner for at beskytte rumaktiver. Forskningen i kollisionsundgåelsesteknologier fokuserede på kollisionsforudsigelse og manøvrestrategier. Kernen i kollisionsforudsigelse var sandsynlighedsberegningsalgoritmer, mens undgåelsesalgoritmer var essensen af strategidesign. Forfatteren diskuterede således udviklingen af algoritmerne til beregning af kollisionssandsynlighed og algoritmerne og strategierne for manøvreundgåelse.
Til sidst opsummerede forfatteren de fire nøglekonklusioner og indsigter for de væsentlige teknologier:
(1) For den overordnede fremgang af den rumbaserede SSA aktiveres fulddimensionelle og multilevel domænebevidsthed og overvågningssystemer. Rumovervågningssystemer forventes at have større dækning, højere nøjagtighed og kortere dataopdatering. For systemenheder vil arbejdsfrekvensen blive ændret fra det lave til det høje bånd. De faste strukturer har en tendens til at være fleksible, og der er implementeret et let design. Ydermere er arbejdsmekanismen udviklet til det distribuerede og fulde digitale array.
(2) Som en væsentlig del af SSA skal der etableres perfekte målfunktionsdatabaser for at give flere forudgående informationer for nøjagtig og hurtig situationsbevidsthed. Med udgangspunkt i kunstig intelligens og cloud computing bør udviklingsstrategierne for big data i rummet formuleres for at fremme den nye generation af informationsteknologier. Desuden forventes effektiv rumtrafikstyring og kommercielle tjenester for højere bæredygtighed og selvbeskyttelse af rumaktiver.
(3) De nuværende intelligente algoritmer til målgenkendelse og overvågning anvender hovedsageligt lille prøveindlæring. De fleste modeller har langsom inferens efter implementering og kan ikke opfylde realtidskrav. Dernæst har de nuværende algoritmer utilstrækkelig generalisering. Derfor er det nødvendigt at designe klassifikatorerne for forskellige kategorier i homologt prøverum. Læringsoverførslerne af heterogene data bør undersøges for at forbedre modellens tilpasningsevne til de målrettede egenskabsændringer i små prøver.
(4) Multiagent og synergetisk konstellationsbevidsthed overvinder begrænsningerne ved tildeling af nyttelast. Legemliggjort intelligens og dyb, generel og evolutionær læring kan anvendes på multiagentsystemer og konstellationer til realistisk multimodal interaktion, hvilket bidrager til den intelligente udvikling af situationsbevidsthedssystemer. + Udforsk yderligere
Et nyt Kalman-filter til målsporing i rummet
 Varme artikler
Varme artikler
-
 Rumfartøjer flyver mellem Saturn og ringe i historisk førstDette billede, der blev stillet til rådighed af NASA i april 2017, viser et stillbillede fra kortfilmen Cassinis Grand Finale, med rumfartøjet, der dykkede mellem Saturn og planetens inderste ring. La
Rumfartøjer flyver mellem Saturn og ringe i historisk førstDette billede, der blev stillet til rådighed af NASA i april 2017, viser et stillbillede fra kortfilmen Cassinis Grand Finale, med rumfartøjet, der dykkede mellem Saturn og planetens inderste ring. La -
 Foreslået astrofysikmission for at udføre den første infrarøde spektralundersøgelse af hele him…Kredit:NASA NASA har for nylig valgt seks foreslåede astrofysiske missioner til konceptstudier. Blandt dem er Spectro-Photometer for the History of the Universe, Reioniseringens epoke, og Ice Expl
Foreslået astrofysikmission for at udføre den første infrarøde spektralundersøgelse af hele him…Kredit:NASA NASA har for nylig valgt seks foreslåede astrofysiske missioner til konceptstudier. Blandt dem er Spectro-Photometer for the History of the Universe, Reioniseringens epoke, og Ice Expl -
 Serendipitous Juno-detektioner ødelægger ideer om oprindelsen af stjernetegnslysDette billede viser stjernetegnslyset, som det så ud den 1. marts, 2021, i Skull Valley, Utah. Pleiades-stjernehoben er synlig nær toppen af lyssøjlen. Mars er lige under det. Kredit:NASA/JPL-Caltec
Serendipitous Juno-detektioner ødelægger ideer om oprindelsen af stjernetegnslysDette billede viser stjernetegnslyset, som det så ud den 1. marts, 2021, i Skull Valley, Utah. Pleiades-stjernehoben er synlig nær toppen af lyssøjlen. Mars er lige under det. Kredit:NASA/JPL-Caltec -
 Billede:Skulpteret af naturen på MarsDette farvekodede topografiske billede viser en del af Mars overflade beliggende nordøst for Tharsis vulkanske provins, baseret på data indsamlet af Mars Express High Resolution Stereo Camera den 30.
Billede:Skulpteret af naturen på MarsDette farvekodede topografiske billede viser en del af Mars overflade beliggende nordøst for Tharsis vulkanske provins, baseret på data indsamlet af Mars Express High Resolution Stereo Camera den 30.
- Sound Wave Science Projekter
- Sådan konverteres tommer til cubisk Feet
- Aktive farmaceutiske ingredienser kan forblive i miljøet
- Hvordan dybhavsåbninger giver næring til massive fytoplanktonopblomstringer
- Voksende Europas nanotråde
- Sidste måned var den varmeste januar nogensinde, Det siger amerikanske videnskabsmænd