


Robotter, der arbejder som en gruppe, er i stand til at bestemme den optimale rækkefølge af deres opgaver
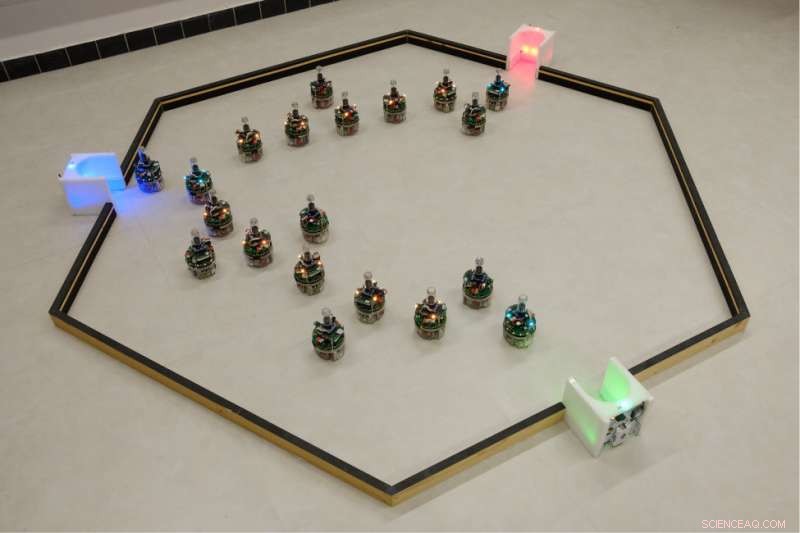
TS-Swarm i sin arena med tre kabiner. Kredit:Garattoni og Birattari, Sci. Robot. 3, eaat0430 (2018)
Kan robotter snart hjælpe redningsmandskaberne med at redde de overlevende efter en naturkatastrofe? En sådan mission ville kræve, at robotterne kunne bestemme, på egen hånd, hvilke opgaver, der skal udføres, og i hvilken rækkefølge de skal udføres; for eksempel, det nytter ikke noget at forsøge at trække et offer ud af murbrokkerne, hvis murbrokkerne endnu ikke er ryddet. I øjeblikket, ingeniører er ansvarlige for at programmere handlingsforløbet. Men det kan snart ændre sig!
Mauro Birattari og Lorenzo Garattoni, forskere ved IRIDIA -laboratoriet (Brussels School of Engineering, Université Libre de Bruxelles), har for nylig vist, at robotter i fællesskab kan beslutte i hvilken rækkefølge de skal udføre deres opgaver. Resultaterne af deres forskning er offentliggjort i Science Robotics denne onsdag, Juli 18.
Forskerne fra IRIDIA -laboratoriet har baseret deres undersøgelse på sværmrobotik, en gren af robotteknologi, der trækker på den sociale og organiserede adfærd hos sociale dyr (f.eks. myrer) for at skabe grupper af robotter, der udviser kunstig intelligens. Robotter er i øjeblikket i stand til at kommunikere og koordinere for at træffe beslutninger og udføre enkle opgaver, såsom at flytte et objekt eller vælge en af to stier. For deres seneste forskning, Mauro Birattari og Lorenzo Garattoni har taget det et skridt videre med hensyn til kompleksitet:de har skabt en sværm af robotter, der er i stand til at udføre en sekvens af tre handlinger, uden at vide den korrekte rækkefølge på forhånd. I praksis, robotterne skulle flytte til tre forskellige punkter i rummet, hvor de skulle udføre en simpel opgave. Først efter at opgaverne var udført, ville robotterne lære om ordren var korrekt. For at løse dette problem, nogle af robotterne danner gradvist en kæde mellem de tre punkter i rummet, som de andre bruger som vejledning, når de tester de forskellige mulige kombinationer ved at følge instruktioner fra de robotter, der udgør kæden (se foto). Til sidst, de bestemmer den korrekte rækkefølge ved at arbejde sammen.
Denne undersøgelse viser, for første gang, at robotter i fællesskab kan bestemme en sekvens af handlinger, hvis påkrævede rækkefølge tidligere var ukendt. Denne evne til at planlægge fremover anses for at være en kompleks kognitiv færdighed, og det fremgår af interaktionerne mellem individerne i gruppen:sammen, robotterne er i stand til at planlægge en række handlinger, som ingen enkeltperson i gruppen ville være i stand til at gøre alene.
Denne forskning baner vejen til en række potentielle applikationer, der involverer en gruppe 'smarte' robotter, dvs. robotter, der kan løse problemer på egen hånd. De muligheder, forskerne forudser, omfatter søgning efter overlevende efter en naturkatastrofe, udforske ukendte eller fjendtlige miljøer, bygningsstrukturer på farlige steder, og forskellige anvendelser inden for landbrug. Evnen - demonstreret i denne undersøgelse - til selvstændigt at bestemme i hvilken rækkefølge opgaverne skal udføres er afgørende for denne type missioner.
Mauro Birattari er vinder af en ERC Consolidator Grant. Denne forskning blev ledet til ERC -projektet "DEMIURGE:automatisk design af robotsværme."
 Varme artikler
Varme artikler
-
 Top australske universitetsrapporter enorme, sofistikeret hackAustralian National University sagde, at det enorme hack fra en sofistikeret operatør havde fået adgang til 19 års følsomme data Et australsk topuniversitet med tætte bånd til landets regering og
Top australske universitetsrapporter enorme, sofistikeret hackAustralian National University sagde, at det enorme hack fra en sofistikeret operatør havde fået adgang til 19 års følsomme data Et australsk topuniversitet med tætte bånd til landets regering og -
 At forstå forskning i, hvordan mennesker udvikler tillid til AI, kan informere brugen af detKredit:CC0 Public Domain Brugen af kunstig intelligens (AI), teknologier, der kan interagere med miljøet og simulere menneskelig intelligens, har potentialet til at ændre den måde, vi arbejder p
At forstå forskning i, hvordan mennesker udvikler tillid til AI, kan informere brugen af detKredit:CC0 Public Domain Brugen af kunstig intelligens (AI), teknologier, der kan interagere med miljøet og simulere menneskelig intelligens, har potentialet til at ændre den måde, vi arbejder p -
 YouTube følger Amazon ind i biograferOscar -vinder Susan Sarandon - vist her ved premieren på Bombshell:The Hedy Lamarr Story under Tribeca Film Festival 2017 i New York - vil medvirke i Vulture Club, den første film produceret af YouTub
YouTube følger Amazon ind i biograferOscar -vinder Susan Sarandon - vist her ved premieren på Bombshell:The Hedy Lamarr Story under Tribeca Film Festival 2017 i New York - vil medvirke i Vulture Club, den første film produceret af YouTub -
 Alibaba slår endnu en Singles Day-rekord, men væksten aftagerAlibaba CEO Daniel Zhang taler foran en skærm, der viser det samlede salg på over 213,5 milliarder yuan (30,7 milliarder USD) kort efter slutningen af den 11.11. eller Singles Day shoppingfestival
Alibaba slår endnu en Singles Day-rekord, men væksten aftagerAlibaba CEO Daniel Zhang taler foran en skærm, der viser det samlede salg på over 213,5 milliarder yuan (30,7 milliarder USD) kort efter slutningen af den 11.11. eller Singles Day shoppingfestival
- Sikkerhed på et øjeblik
- Forskellen mellem lavvande og højvande
- Forskere genskaber levende 3D-skærme
- Forskere lægger ud med, hvordan man kan kontrollere biologi med lys - uden genetik
- Farlig arktisk chill fejer over det amerikanske Midtvesten (opdatering)
- Eksperimenter validerer modeller, der forudsiger fejltilstande i miniaturiserede lette strukturer