


En ultra-strækbar triboelektrisk strimmelsensor (TSS) til styring af objekter i 3D-rum
Kredit:Chen et al.
Nanogeneratorer, teknologiske værktøjer, der kan omdanne mekanisk eller termisk energi til elektricitet, kommer i tre nøgledesigns:piezoelektrisk, triboelektrisk og pyroelektrisk. Mens piezoelektriske og triboelektriske nanogeneratorer kan konvertere mekanisk energi til elektricitet, pyroelektriske arbejder ved at høste termisk energi.
I løbet af de sidste par år, triboelektriske nanogeneratorer er blevet mere og mere populære til både energihøst og sensorapplikationer. Indtil nu, imidlertid, deres præstationer i multidimensionel informationsopfattelse og interaktive kontrolopgaver har været temmelig skuffende.
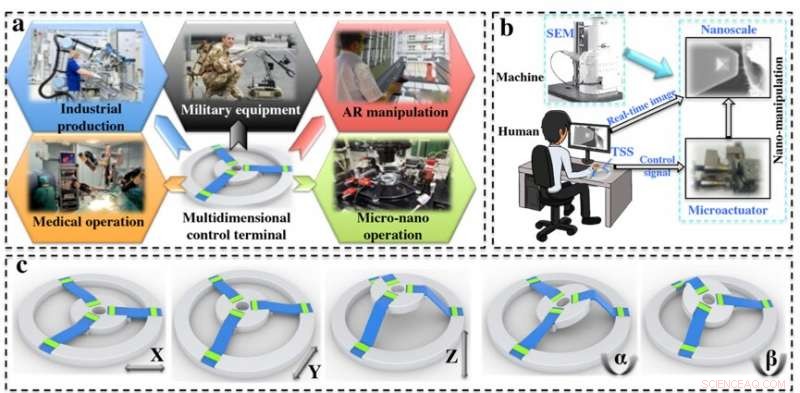
Forskere ved National University of Singapore har for nylig udviklet sensorer til styring af objekter i 3D-rum baseret på triboelektriske nanogeneratorer. Disse sensorer, præsenteret i et papir udgivet i Nano energi , består af en parallel struktur med tre symmetriske sensorstrimler fastgjort på bunden og en mobil scene forbundet til dem.
"Med udviklingen af videnskaben, automations- og robotteknologier er trængt ind i mange aspekter af menneskelige aktiviteter, "Tao Chen, en af de forskere, der har udført undersøgelsen, fortalte TechXplore. "Robotter er ikke kun meget udbredt i automatiske produktionslinjer og underholdningsområder, men kan også have medicinsk, rumfart og militær anvendelse, samt mange andre. Imidlertid, der er utilgængelige, uforudsigelige farlige eller uundgåelige udfordringer for mennesker til at interagere eller udføre komplekse opgaver i miljøer, hvor udstyr holdes i vakuum, undersøiske, rum og nanometer skala, etc."
For at muliggøre effektive interaktioner mellem mennesker og automatiserede systemer, forskere har udviklet kontrolterminaler, der kan betjenes på en række forskellige måder, såsom berøringsskærme, tastaturer eller rockerstrukturer. I de fleste tilfælde, disse kontrolmekanismer er indirekte, de har derfor brug for komplekse instruktionsanalyser og beregninger for at svare til bevægelsestilstanden for det objekt, der skal manipuleres.
"I denne avis, vi præsenterer en ultra-stretchable triboelectric strip sensor (TSS) til styring af objektets holdninger i rummet, " Chen forklarede. "Vores TSS kunne forbedre ydeevnen af robotter i en række forskellige miljøer, herunder undersøiske, plads og mere."
I deres undersøgelse, Chen og hans kolleger brugte en ultra-strækbar tribolelektrisk strimmel som en rumlig sensor, som i sidste ende giver robotter mulighed for at styre objekter i 3D-rum. På grund af koblingseffekten af triboelektrificering og elektrostatisk induktion, længden af strimlen ændres, med det samme fingerkontaktpunkt, der genererer forskellige signaludgangsforhold fra to terminalelektroder (E1 og E2). Disse elektroder fungerer som den interaktive grænseflade til multidimensionel sansning og kontrol.
"Den ene ende af strimlens E1-elektrode er fastgjort, mens elektrode E2 er bevægelig under trækspænding i forhold til E1, " sagde Chen. "Udgangsspændingsforholdet mellem de to elektroder (VE2/VE1) opnås under kontakt og adskillelse af finger og silikonegummi med konstant afstand fra E1. Desuden, strimlen strækkes en vis længde, reduktionen af spændingsforholdet bestemmes, når vi genberører den samme position (referencepunkt) i en konstant afstand i forhold til E1-elektroden."
Efterhånden som strimlens strækkelængde øges, dette spændingsforhold falder. Mekanismen brugt af Chen og hans kolleger gjorde det muligt for dem at måle den forlængede længde af E2-siden af strimlen, ved at røre det referencepunkt, der er fastgjort fra E1. Med andre ord, forskydningen af deres strimmel, mens den er strakt, dens strækningshastighed og accelerationen af E2-elektroden kan alle måles med en konstant kontaktfrekvens.
"Princippet for sensordetektion, der bruges her, er hovedsageligt at bestemme længden ved at sammenligne spændingsforholdet mellem de to elektroder, " sagde Chen. "Derfor, detekteringsmekanismen ved hjælp af spændingsforholdsmetoden undgår påvirkning af miljøfugtighed og ujævn kraft. Så, dette er en effektiv detektionsmetode til at undgå ustabilitet og interferens."
Chen og hans kolleger introducerede en ny genstandsdetekteringsmetode baseret på en langsgående bevægelsessensor, der bruger genererede spændingsforhold. I deres undersøgelse, de brugte tre selvdrevne fleksible sensorer til at opnå en 5D-positioneringsprojektion i rummet. Deres metode er enklere og mere intuitiv end underliggende traditionelle stive (ikke-strækbare) strukturer, men det tilføjer også rumdimensioner.
"På nuværende tidspunkt betjeningen af nanoskala ved hjælp af håndtag eller nøgletilstand er ikke intuitiv, " sagde Chen. "Vores tilgang kan være mere fleksibel og intuitiv til menneske-maskine-interaktioner på nanoskala."
I en indledende demonstration, forskerne brugte deres TSS-enhed som en menneske-nanomaskine terminal til at styre deres nanomanipulator i en scanning elektronmikroskopi (SEM) opgave. I denne opgave, deres enhed tillod dem at betjene kulstofnanorørene og med succes fuldføre udvindingen af kulstofnanorør.
"Mikro-nano-manipulationsresultaterne, som vi indsamlede, bekræfter TSS-enhedens fremragende ydeevne på perceptuelle og kontrolapplikationer, som er relevante for områder som robotteknologi, VR og IoT, " sagde Chen. "I en opfølgende undersøgelse, vi planlægger at udføre forskning i tohåndscontrolleren, for at opnå mere intuitiv og bekvem interaktion mellem menneske og maskine."
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Verdens første som kunstige neuroner udviklet til at helbrede kroniske sygdommeEn af de kunstige neuroner i dens beskyttende kappe på en fingerspids. Kredit:University of Bath Kunstige neuroner på siliciumchips, der opfører sig ligesom den virkelige ting, er opfundet af fors
Verdens første som kunstige neuroner udviklet til at helbrede kroniske sygdommeEn af de kunstige neuroner i dens beskyttende kappe på en fingerspids. Kredit:University of Bath Kunstige neuroner på siliciumchips, der opfører sig ligesom den virkelige ting, er opfundet af fors -
 Statens politi i New York halter bagefter bureauer på landsplan for kamerabrugDenne 8. maj, 2017 foto leveret af hans familie viser Luke Patterson. Patterson blev skudt og dræbt af en New York State Trooper den 23. maj, 2019, mens du går alene langs skulderen på en motorvej. Tr
Statens politi i New York halter bagefter bureauer på landsplan for kamerabrugDenne 8. maj, 2017 foto leveret af hans familie viser Luke Patterson. Patterson blev skudt og dræbt af en New York State Trooper den 23. maj, 2019, mens du går alene langs skulderen på en motorvej. Tr -
 Leveringsgiganten DoorDash tager skridt i retning af offentligt udbudDoorDash -appen vises på en smartphone torsdag, 27. februar kl. 2020 i New York. Madleveringsgiganten har taget et første formelt skridt mod en børsdebut. Virksomheden meddelte torsdag, at det har for
Leveringsgiganten DoorDash tager skridt i retning af offentligt udbudDoorDash -appen vises på en smartphone torsdag, 27. februar kl. 2020 i New York. Madleveringsgiganten har taget et første formelt skridt mod en børsdebut. Virksomheden meddelte torsdag, at det har for -
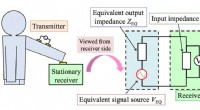 Gøre menneskekroppens internet mere effektivtEksperimentopsætning for at forstå, hvordan egenskaber ved menneskelig kropskommunikation kan forbedres. Kredit:Dairoku Muramatsu &Yoshifumi Nishida, Kilde:Equivalent Circuit Model Set from Receiver S
Gøre menneskekroppens internet mere effektivtEksperimentopsætning for at forstå, hvordan egenskaber ved menneskelig kropskommunikation kan forbedres. Kredit:Dairoku Muramatsu &Yoshifumi Nishida, Kilde:Equivalent Circuit Model Set from Receiver S
- Første kig:LG V40 ThinQ smartphone har fem kameraer, men har du virkelig brug for dem?
- Tidevands- og mangroveaflejringer under Oligo-Miocæn i Det Sydkinesiske Hav
- High-fidelity-simuleringer viser vejen til optimering af varmeoverførsel i nuværende og næste gen…
- Når coronavirus ikke er alene:Team af kompleksitetsforskere præsenterer mememodel for flere sygdom…
- Brandmænd afholder bushbrand nær Australias Perth
- Ny teknologi måler småskala strømme, der transporterer havplast, olieudslip