


Hundlignende robot hopper, vender og traver
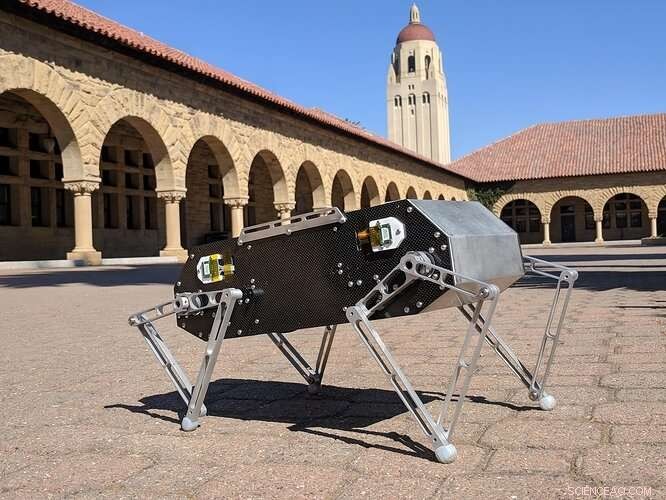
Stanford Doggo Project:en ODrive-drevet firdobbelt robot
Sætter deres eget twist på robotter, der går gennem komplicerede landskaber, Stanford Student Robotics-klubbens Extreme Mobility-team har udviklet en firbenet robot, der ikke kun er i stand til at udføre akrobatiske tricks og krydse udfordrende terræn, men også er designet med reproducerbarhed i tankerne. Enhver, der ønsker deres egen version af robotten, kaldet Stanford Doggo, kan konsultere omfattende planer, kode og en forsyningsliste, som eleverne har stillet frit tilgængeligt online.
"Vi havde set disse andre firdobbelte robotter brugt til forskning, men de var ikke noget, du kunne bringe ind i dit eget laboratorium og bruge til dine egne projekter, "sagde Nathan Kau, '20, en maskinteknisk major og bly for ekstrem mobilitet. "Vi ville have, at Stanford Doggo skulle være denne open source -robot, som du selv kunne bygge på et relativt lille budget."
Mens andre lignende robotter kan koste titusinder eller hundredtusinder af dollars og kræve tilpassede dele, Extreme Mobility -eleverne anslår omkostningerne ved Stanford Doggo til mindre end $ 3, 000-inklusive fremstillings- og forsendelsesomkostninger-og næsten alle komponenterne kan købes som de er online. De håber, at tilgængeligheden af disse ressourcer inspirerer et fællesskab af Stanford Doggo -producenter og forskere, der udvikler innovative og meningsfulde spinoffs fra deres arbejde.
Allerede Stanford Doggo kan gå, trav, dans, hoppe, hoppe og udføre lejlighedsvis backflip. Eleverne arbejder på en større version af deres skabelse - som i øjeblikket er på størrelse med en beagle - men holder en kort pause for at præsentere Stanford Doggo på den internationale konference om robotteknologi og automatisering den 21. maj i Montreal, Canada.
Et hop, et spring og et tilbageslag
For at gøre Stanford Doggo replikerbar, eleverne byggede det fra bunden. Dette betød at bruge meget tid på at undersøge let tilgængelige forsyninger og teste hver del, som de lavede det, uden at stole på simuleringer.
"Det er omkring to år siden, vi først havde ideen om at lave en firdobbelt. Vi har helt sikkert lavet flere prototyper, før vi rent faktisk begyndte at arbejde på denne iteration af hunden, "sagde Natalie Ferrante, '19, en maskiningeniørstuderende og medlem af Extreme Mobility Team. "Det var meget spændende første gang, vi fik ham til at gå."
Stanford Doggos første trin var ganske vist toddling, men nu kan robotten opretholde en konsekvent gangart og ønsket bane, selvom den støder på forskellige terræn. Det gør det ved hjælp af motorer, der registrerer ydre kræfter på robotten og bestemmer, hvor meget kraft og drejningsmoment hvert ben skal reagere som reaktion. Disse motorer genberegnes ved 8, 000 gange i sekundet og er afgørende for robotens signaturdans:en hoppende boogie, der skjuler det faktum, at den ikke har fjedre. I stedet, motorerne fungerer som et system af virtuelle fjedre, jævnligt men vedligeholdende rebounder robotten i korrekt form, når de fornemmer, at den er ude af position.
Blandt de færdigheder og tricks, teamet tilføjede til robotens repertoire, eleverne var usædvanligt overraskede over dens springende dygtighed. Kører Stanford Doggo gennem sine skridt en (meget) tidlig morgen i laboratoriet, holdet indså, at det ubesværet dukkede 2 fod op i luften. Ved at skubbe grænserne for robotens software, Stanford Doggo var i stand til at springe 3, derefter 3½ fod fra jorden.
"Det var da vi indså, at robotten var, i nogle henseender, højere ydeevne end andre firdobbelte robotter, der bruges til forskning, selvom det var virkelig lavt, "huskede Kau.
Siden da, eleverne har lært Stanford Doggo at lave en backflip - men altid på polstring for at muliggøre hurtige forsøg og fejlforsøg.
Hvad vil Stanford Doggo gøre næste gang?
Hvis disse elever har det på deres måde, fremtiden for Stanford Doggo i massernes hænder.
"Vi håber at kunne levere et baseline -system, som alle kunne bygge, "sagde Patrick Slade, kandidatstuderende i luftfart og astronautik og mentor for ekstrem mobilitet. "Sige, for eksempel, du ønskede at arbejde med eftersøgning og redning; du kunne klæde den på med sensorer og skrive kode oven på vores, der ville lade den klatre på stenbunker eller grave ud gennem huler. Eller måske er det at hente ting med en arm eller bære en pakke. "
Dermed ikke sagt, at de ikke fortsætter deres eget arbejde. Extreme Mobility samarbejder med Robotic Exploration Lab i Zachary Manchester, adjunkt i luftfart og astronautik, at teste nye kontrolsystemer på en anden Stanford Doggo. Holdet er også færdigt med at konstruere en robot, der er dobbelt så stor som Stanford Doggo, der kan bære omkring 6 kilo udstyr. Dens navn er Stanford Woofer.
 Varme artikler
Varme artikler
-
 Dele af induktionsmotorerEn induktionsmotor er en type elektrisk motor, der omdanner elektrisk strøm til roterende bevægelse. En induktionsmotor anvender princippet om elektromagnetisk induktion for at få rotoren til at dreje
Dele af induktionsmotorerEn induktionsmotor er en type elektrisk motor, der omdanner elektrisk strøm til roterende bevægelse. En induktionsmotor anvender princippet om elektromagnetisk induktion for at få rotoren til at dreje -
 Kæmpe Taiwan Apple-leverandør TSMC står over for krænkelseskravTaiwan Semiconductor Manufacturing Company bliver sagsøgt af den amerikanske rival Global Foundries for påstået patentkrænkelse Den taiwanske chipproducentgigant TSMC, en vigtig Apple-leverandør,
Kæmpe Taiwan Apple-leverandør TSMC står over for krænkelseskravTaiwan Semiconductor Manufacturing Company bliver sagsøgt af den amerikanske rival Global Foundries for påstået patentkrænkelse Den taiwanske chipproducentgigant TSMC, en vigtig Apple-leverandør, -
 Gennemgang evaluerer, hvordan kunstig intelligens kan øge succesen med kliniske forsøgKredit:CC0 Public Domain I en anmeldelse, der offentliggøres 17. juli i tidsskriftet Tendenser i farmakologiske videnskaber , forskere undersøgte, hvordan kunstig intelligens (AI) kunne påvirke
Gennemgang evaluerer, hvordan kunstig intelligens kan øge succesen med kliniske forsøgKredit:CC0 Public Domain I en anmeldelse, der offentliggøres 17. juli i tidsskriftet Tendenser i farmakologiske videnskaber , forskere undersøgte, hvordan kunstig intelligens (AI) kunne påvirke -
 At bringe mere menneskelig intelligens til AI, datavidenskab og digital automatiseringKredit:Mary Ann Liebert, Inc., udgivere Datavidenskabens fremkomst, trådløs forbindelse og sensorer, kunstig intelligens (AI), og tingenes internet (IoT) har øget udsigterne for digital automatise
At bringe mere menneskelig intelligens til AI, datavidenskab og digital automatiseringKredit:Mary Ann Liebert, Inc., udgivere Datavidenskabens fremkomst, trådløs forbindelse og sensorer, kunstig intelligens (AI), og tingenes internet (IoT) har øget udsigterne for digital automatise
- Opdaterede standardscenarier Outlook -modeller mulige futures for amerikansk elsektor
- Nyt system kan fjerne to vandforurenende stoffer fra landbrugsmarker
- Londons politi implementerer ansigtsscanningsteknologi, frygt for privatlivets fred
- NASA-NOAAs Suomi NPP Satellite får en infrarød udsigt over tyfonen Trami
- En fæstning af is og sne
- Under brand Huawei og foldbare skærme i fokus på topmobilmessen