


Prediktiv berøringsresponsmekanisme er et skridt mod et taktilt internet
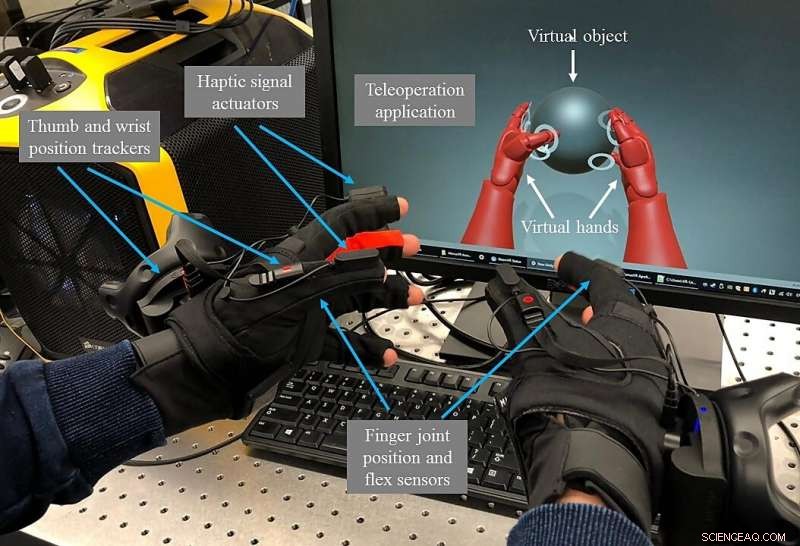
Eksperimentel opsætning, der demonstrerer applikationer mellem mennesker. Kredit:S. Mondal, et al., University of Melbourne
Et taktilt internet er potentielt den næste fase af tingenes internet, hvor mennesker kan røre og interagere med fjerntliggende eller virtuelle objekter, mens de oplever realistisk haptisk feedback.
Et team af forskere ledet af Elaine Wong ved University of Melbourne, Australien, udviklet en metode til forbedring af haptiske feedbackoplevelser i applikationer fra menneske til maskine, der er typiske på det taktile internet. Forskerne mener, at deres metode kan bruges til at forudsige korrekt feedback i applikationer lige fra elektronisk sundhedspleje til virtual reality -spil.
Wong og hendes kolleger vil præsentere deres foreslåede modul, som bruger et kunstigt neuralt netværk til at forudsige det berørte materiale, ved optisk fiberkommunikationskonference og -udstilling (OFC), afholdes 8.-12. marts 2020 i San Diego Convention Center, Californien, USA.
Afhængig af dynamikken i interaktionen, en optimal menneske-til-maskine-applikation kan kræve en netværkssvaretid så kort som et millisekund.
"Disse svartider sætter en grænse for, hvor langt fra hinanden mennesker og maskiner kan placeres, "sagde Wong." Derfor, løsninger til at afkoble denne afstand fra netværkets responstid er afgørende for at realisere det taktile internet. "
Som et skridt mod dette mål, teamet uddannede en forstærkningslæringsalgoritme til at gætte den passende haptiske feedback i et system mellem mennesker og maskiner, før den korrekte feedback kendes. Modulet, kaldet den hændelsesbaserede HAptic SAmple Forecast (EHASAF), fremskynder processen ved at give et berøringssvar baseret på en sandsynlig forudsigelse af det materiale, brugeren interagerer med.
"For at lette mennesker-til-maskine applikationer over langdistancenetværk, vi stoler på kunstig intelligens for at overvinde virkningerne af lang spredningstid, "sagde Sourav Mondal, en forfatter på papiret.
Når det faktiske materiale er identificeret, enheden tilpasser og opdaterer sin sandsynlighedsfordeling for at hjælpe med at vælge den korrekte feedback fremadrettet.
Gruppen testede EHASAF -modulet med et par virtual reality -handsker, der blev brugt af et menneske til at røre ved en virtuel bold. Handskerne indeholder sensorer på fingre og håndled for at registrere berøring og spore bevægelser, kræfter og håndens orientering.
Afhængigt af hvilken materialebold brugeren vælger at røre ved de fire virtuelle muligheder, feedbacken fra handsken skal variere. For eksempel, en metalbold vil være fastere end en skumkugle. Når et neuralt netværk bestemmer, at en af fingrene har rørt bolden, EHASAF -modulet begynder at cykle gennem feedback -muligheder for at generere, indtil det løser det faktiske materiale i den valgte bold.
I øjeblikket, med fire materialer, modulets forudsigelsesnøjagtighed er omkring 97%.
"Vi tror, det er muligt at forbedre forudsigelsesnøjagtigheden med et større antal materialer, "sagde Mondal." Dog, mere sofistikerede kunstige intelligens-baserede modeller er nødvendige for at opnå det. "
"Flere og mere sofistikerede modeller med forbedret ydeevne kan udvikles baseret på den grundlæggende idé om vores foreslåede EHSAF -modul, "Sagde Mondal.
Disse resultater og yderligere forskning vil blive præsenteret på stedet ved OFC 2020.
 Varme artikler
Varme artikler
-
 Netflix ser stærk abonnentvækst i Asien, latin AmerikaNetflix står over for skærpet konkurrence på det amerikanske marked, men har et forspring i forhold til streaming-rivaler i mange dele af verden Netflix oplever en hurtig abonnentvækst i regioner,
Netflix ser stærk abonnentvækst i Asien, latin AmerikaNetflix står over for skærpet konkurrence på det amerikanske marked, men har et forspring i forhold til streaming-rivaler i mange dele af verden Netflix oplever en hurtig abonnentvækst i regioner, -
 Symantec bagatelliserer mystisk intern undersøgelseAktier i Symantec lukkede handelsdagen med 9,6 procent til 21,40 dollar, før topledere holdt en telefonkonference for at diskutere virksomhedens økonomiske udsigter Symantec -aktier genvandt noget
Symantec bagatelliserer mystisk intern undersøgelseAktier i Symantec lukkede handelsdagen med 9,6 procent til 21,40 dollar, før topledere holdt en telefonkonference for at diskutere virksomhedens økonomiske udsigter Symantec -aktier genvandt noget -
 American Airlines rapporterer højere overskud trods MAX -hitAmerican Airlines rapporterede et hop i fjerde kvartals overskud på grund af fortsat stærk forbrugerefterspørgsel, der opvejede hit fra 737 MAX-grundstødningen American Airlines rapporterede et ho
American Airlines rapporterer højere overskud trods MAX -hitAmerican Airlines rapporterede et hop i fjerde kvartals overskud på grund af fortsat stærk forbrugerefterspørgsel, der opvejede hit fra 737 MAX-grundstødningen American Airlines rapporterede et ho -
 Danske forskere skaber en verdensomspændende solenergimodelGrafikken viser den samlede solenergiproduktion for alle europæiske lande i perioden 2013-2017. Hvert lille felt repræsenterer en uges energiproduktion:Jo lysere farve, jo mere energi blev der produce
Danske forskere skaber en verdensomspændende solenergimodelGrafikken viser den samlede solenergiproduktion for alle europæiske lande i perioden 2013-2017. Hvert lille felt repræsenterer en uges energiproduktion:Jo lysere farve, jo mere energi blev der produce
- NASA-satellitbilleder viser udviklingen af orkanen Harvey
- Sådan konverteres væske ounces vand til vægt
- Efterglød kaster lys over naturen, oprindelsen af neutronstjernekollisioner
- Fisk og skaldyr hjalp forhistoriske mennesker med at migrere ud af Afrika, undersøgelse afslører
- Halvtransparente perovskit solceller med grafenelektroder
- Absorptionen af individuelle elektroner optaget på video