


En ramme til at evaluere og sammenligne selvrekonfigurerbare robotsystemer
Kredit:Tan et al.
Selvrekonfigurerbare robotter (SRR'er), der automatisk kan ændre form og tilpasse sig deres omgivende miljø, har for nylig tiltrukket sig stor interesse inden for robotforskningsmiljøet. Disse robotter kan have flere nyttige applikationer, da de kan opnå et højt niveau af autonomi i at fornemme deres omgivende miljø, samt i planlægning og udførelse af passende handlinger. Mens tidligere undersøgelser har introduceret metoder til at klassificere disse robotter i undergrupper, der er stadig ingen standardprocedure til at evaluere deres præstationer.
Med det i tankerne, forskere ved Sun Yat-sen University i Kina og og Singapore University of Technology and Design har for nylig udviklet en ramme for taksonomi og evaluering (TAEV) af selvrekonfigurerbare robotter. Deres studie, med i IEEE adgang , blev finansieret af Singapore National Robotics R&D Program Office.
"Indtil nu, forskere har udtænkt en kvalitativ tilgang til klassificering af SRR'er, men ikke kvantitative metoder, der kan vejlede designeren, producent og robotbruger, "Abdullah Aamir Hayat, en af de forskere, der har udført undersøgelsen, fortalte TechXplore. "Dette motiverede os til at udvikle en ramme og en evalueringsmetode for SRR'er."
I SRR'er, Evnen til at ændre form for at fuldføre en given opgave afhænger primært af typen af mekanismer, robotterne anvender, og deres autonominiveau. Mens nogle SRR-systemer er fuldt autonome, andre kræver en vis grad af manuel fjernbetjening.
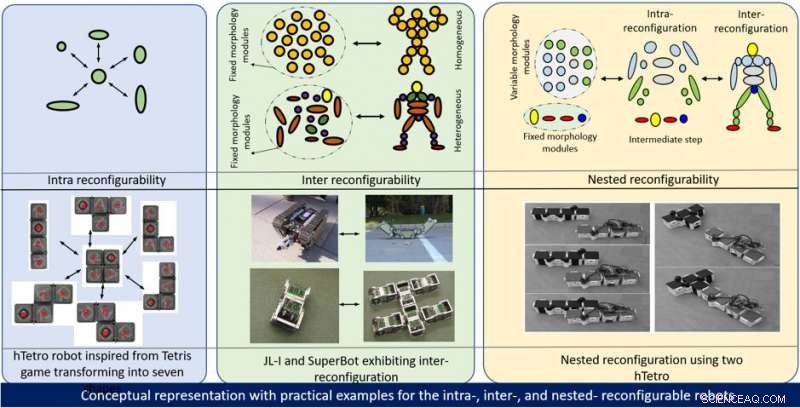
På et mekanisk niveau, robotterne kan klassificeres i tre hovedkategorier:dem med en intra-, mellem-, og indlejret omkonfiguration. Forskellen mellem intra- og inter-rekonfigurationer ligger i antallet af tilgængelige konfigurationer for robotten og omfanget af disse konfigurationer.
Forskellen mellem intra- og inter-rekonfigurerbarhed er, at førstnævnte involverer et enkelt robotmodul, der kan ændre dets morfologi uden nogen samling eller demontering, og sidstnævnte involverer to eller flere moduler, der kan samles eller skilles ad. Integrering af både inter og intra giver den indlejrede rekonfigurerbarhed. Kredit:Tan et al.
Intra-rekonfigurerbarhed involverer et enkelt robotmodul, der kan ændre dets morfologi uden nogen form for montering eller adskillelse, mens inter-rekonfigurerbarhed involverer to eller flere moduler, der kan samles eller skilles ad. Endelig, indlejret omkonfiguration, opfundet af prof. Mohan Rajesh Elara og prof. Kristin L. Wood, kombinerer funktioner i både intra- og inter-rekonfigurationer.
I deres papir, Hayat og deres kolleger introducerede målinger, der kan bruges til at evaluere SRR'er, kvantificering af deres grad af autonomi og antallet af tilgængelige konfigurationer. Disse målinger blev kombineret for at skabe en TAEV-ramme, der kunne vejlede forskere og producenter i at evaluere deres robotsystemer.
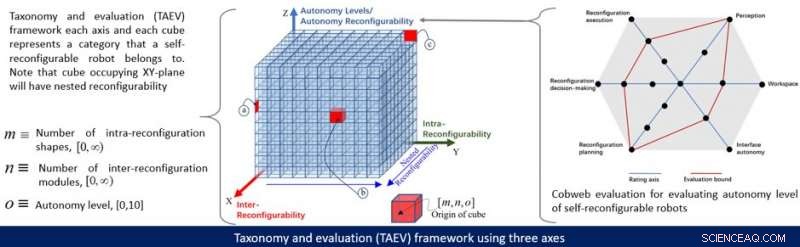
"Vores arbejde kvantificerer mekanismens rekonfigurerbarhed ved at tildele et indeks på basis af en række betydningsmorfologier og antallet af involverede moduler, Hayat forklarede. "Disse indekser er repræsenteret på de to akser (X- og Y-) i den tre-aksede ramme. Den tredje akse (Z-) er tildelt indekset givet af niveauet af autonomi, som beregnes ved hjælp af spindelvævsevalueringsmodellen bestående af seks præstationsindikatorer, nemlig rekonfigurationsplanlægning, beslutningstagning, grænseflade autonomi, opfattelse, og arbejdsplads."
Den største fordel ved den ramme, der er udviklet af Hayat og hans kolleger, er, at den allokerer et unikt indeks til en given SRR inden for det 3-D taksonomirum, som de skitserede i deres papir. Som resultat, det kunne bruges til at designe afvejningsundersøgelser og udtænke tilgange til at vurdere eller sammenligne ydeevnen af forskellige SRR'er på den samme opgave.
"Den generiske ramme, vi præsenterede, kan anvendes på adskillige eksisterende SRR'er, gør det muligt at klassificere dem ikke kun kvalitativt baseret på deres størrelse, bevægelse, osv. men også kvantitativt, inkorporerer robotternes mekanisme og autonomi, " sagde Hayat.
I fremtiden, denne ramme for TAEV kunne hjælpe med at evaluere SRR'er mere effektivt, samtidig med at de identificerer deres begrænsninger og funktioner, der kunne forbedres. Både forskere og producenter kunne bruge det til at sammenligne ydeevnen af forskellige robotter på de samme opgaver eller til at evaluere forskellige versioner af den samme robot. I deres papir, Hayat og deres kolleger diskuterer også andre potentielle anvendelser for den nye ramme, ved at bruge eksisterende robotter som eksempler.
"Vores resultater tyder på, at der er et enormt potentiale for nye robotdesigns med autonomi til at optage det tredimensionelle rum, og at indlejrede rekonfigurerbare arkitekturer kan have mange praktiske anvendelser, " sagde Hayat. "Med dette i tankerne, vores gruppe arbejder på at implementere nye intra-, mellem-, og indlejrede rekonfigurerbare robotarkitekturer til udførelse af vedligeholdelsesopgaver, nemlig autonom rengøring og overvågning."
© 2020 Science X Network
 Varme artikler
Varme artikler
-
 Google-medarbejdere underskriver protestbrev over Kinas søgemaskine:NYTGoogle-medarbejdere er angiveligt bekymrede over et hemmeligt censorvenligt søgemaskineprojekt for Kina Hundredvis af Google-ansatte har underskrevet et protestbrev over virksomhedens rapporterede
Google-medarbejdere underskriver protestbrev over Kinas søgemaskine:NYTGoogle-medarbejdere er angiveligt bekymrede over et hemmeligt censorvenligt søgemaskineprojekt for Kina Hundredvis af Google-ansatte har underskrevet et protestbrev over virksomhedens rapporterede -
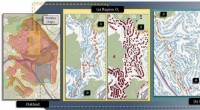 Ny model kvantificerer samfunds sårbarhed over for spredning af brandEn region i Oakland, der er ramt af en naturbrand i 1991, der viser brandstedet. To regioner er udvalgt til analyse med forskellige vindretninger. For begge regioner, sårbarhed for hver retning beregn
Ny model kvantificerer samfunds sårbarhed over for spredning af brandEn region i Oakland, der er ramt af en naturbrand i 1991, der viser brandstedet. To regioner er udvalgt til analyse med forskellige vindretninger. For begge regioner, sårbarhed for hver retning beregn -
 Kan vi producere nok grønt brint til at redde verden?Brug af en protonudvekslingsmembranelektrolysator til at producere brint fra vedvarende elektricitet og vand kan hjælpe industrien med at reducere emissionerne. Kredit:Siemens Omkring en femtedel
Kan vi producere nok grønt brint til at redde verden?Brug af en protonudvekslingsmembranelektrolysator til at producere brint fra vedvarende elektricitet og vand kan hjælpe industrien med at reducere emissionerne. Kredit:Siemens Omkring en femtedel -
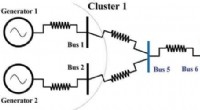 Symmetri er afgørende for synkronisering af strømnetværkEt strømnet bestående af fire generatorer og seks busser (forbindelsespunkter). Generator 1 og 2 og bus 1 og 2, hvortil disse er forbundet, bliver til et symmetrisk netværk for Bus 5. På samme måde Ge
Symmetri er afgørende for synkronisering af strømnetværkEt strømnet bestående af fire generatorer og seks busser (forbindelsespunkter). Generator 1 og 2 og bus 1 og 2, hvortil disse er forbundet, bliver til et symmetrisk netværk for Bus 5. På samme måde Ge
- Bag jerntæppet:Hvordan metandannende mikrober holdt den tidlige Jord varm
- Miljøkemiker blinker advarselslys på ny nanopartikel
- NASA tilføjer kraftig nedbør fra det sydøstlige amerikansk hårdt vejr
- Iltoverskydende oxider i Jordens midterkappe letter opstigningen af dyb ilt
- Forskere udvikler nanoskala -prober til ssDNA -bæredygtighed under UV -stråling
- Ny model, der beskriver deformation og brud på dråber, kan hjælpe med at forbedre udskrivning og …