


Lillebitte blød robot kan opdeles i mindre stykker og derefter samles igen efter passage gennem små rum
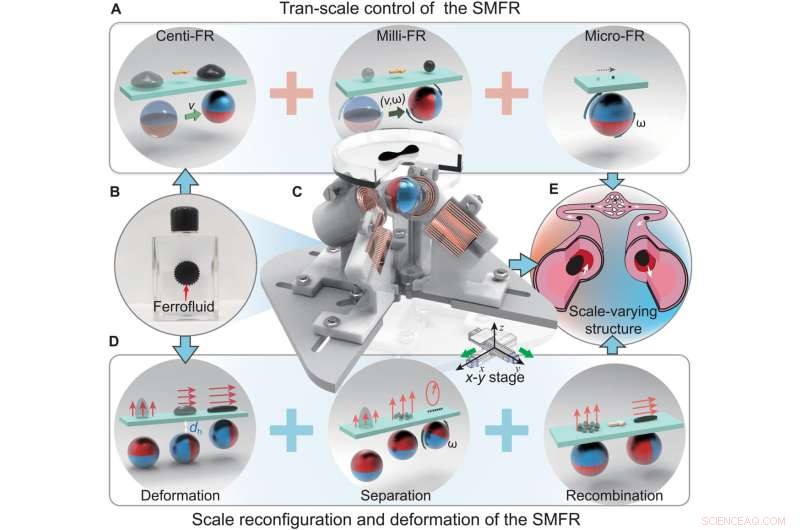
Oversigt over trans-skala manøvre og skala rekonfiguration strategier af skala-rekonfigurerbare miniature ferrofluidic robotter (SMFR'er). (A) Trans-scale kontrol af SMFR:bevægelse af centi-FR, milli-FR og mikro-FR baseret på henholdsvis magnetisk gradient, både magnetisk gradient og moment og kun magnetisk moment. (B) Responsadfærd af ferrofluiddråber i magnetiske felter. (C) SMFR manipuleres af et specialdesignet magnetisk aktiveringssystem (M3RA-systemet), der består af fire elektromagneter, en sfærisk permanent magnet (SPM) og et motoriseret translationstrin. For nemt at observere systemets interne sammensætning skjuler vi en fjerdedel af strukturen. (D) Deformation og skaleringsrekonfiguration af SMFR:strækdeformation, nedskalering gennem adskillelse og opskalering gennem rekombination. Den røde pil repræsenterer magnetfeltets polarisationsretning. (E) Typisk anvendelsesscenarie for SMFR baseret på kombinationen af ovennævnte kapaciteter:bevægelse i et skarpt variabelt rum, såsom det vaskulære netværk. Kredit:Science Advances (2022). DOI:10.1126/sciadv.abq1677
Et team af forskere ved Soochow University, der arbejder med to kolleger fra Max Planck Institute for Intelligent Systems og en anden fra Harbin Institute of Technology, har udviklet en type blød robot, der kan opdeles i mindre komponenter til at passere gennem små rum og derefter samles igen. I deres papir offentliggjort i tidsskriftet Science Advances , beskriver gruppen, hvordan de lavede deres bittesmå robotter og foreslår mulige anvendelser for dem.
Mens videnskaben om robotteknologi fortsætter med at modnes, fortsætter ingeniører rundt om i verden med at finde nye måder at fremstille dem på. I denne nye indsats lavede forskerne deres ud af en ferrofluid (magnetiske jernoxidnanopartikler), som de suspenderede i en klar olie. Robotten styres ved hjælp af eksterne magneter.
Ved at bruge en robot lavet af et materiale, der kun holdes meget løst sammen, bemærker forskerne, at dens form kan ændres efter behov. Ved at anvende flere magnetiske felter viste de, at det var muligt at lede deres robot gennem en labyrint, og til tider ændrede dens form for at overvinde forhindringer. De tvang den til at forlænge, for eksempel for at presse sig gennem en smal passage. De brød det også i et ønsket antal mindre dele for at passere gennem et porøst materiale. I begge tilfælde blev robotten så let samlet igen til en enkelt rund robotform og fortsatte med sin rejse. De bemærker, at sådan en robot kan laves i en lang række størrelser.
Robotten kunne tænkes at blive brugt i medicinske applikationer som et middel til at transportere stoffer til svært tilgængelige kropsdele, såsom lungeknuder eller dele af hjernen. Forskerne anerkender, at designet til praktiske formål skulle overvinde mange forhindringer, mest åbenlyst udviklingen af et magnetisk kontrolsystem, der præcist kan trænge ind i knogler såsom kraniet. I mellemtiden har andre bemærket, at et sådant robotsystem kan vise sig at være nyttigt i laboratorie-på-en-chip-enheder, hvor kemiske processer udføres til opgaver som virusdetektion. De små nye robotter kunne måske bruges til at bære de kemikalier, der er nødvendige for reaktionerne. + Udforsk yderligere
On-the-fly rekonfigurerbar magnetisk slime brugt som robot
© 2022 Science X Network
Sidste artikelMaskinlæring genererer 3D-model fra 2D-billeder
Næste artikelHackere fik adgang til data om nogle American Airlines-kunder
 Varme artikler
Varme artikler
-
 Efterlader fossiler til fremtidens transportKredit:University of Bath En af de vigtigste udfordringer, vi står over for som art i det 21. århundrede, er, hvordan vi kan sameksistere med naturen på en bæredygtig måde, samtidig med at vi opre
Efterlader fossiler til fremtidens transportKredit:University of Bath En af de vigtigste udfordringer, vi står over for som art i det 21. århundrede, er, hvordan vi kan sameksistere med naturen på en bæredygtig måde, samtidig med at vi opre -
 Nigeria beordrer S.Africas MTN til at refundere $8,13 miaMTN og Nigerias centralbank er i strid med milliarder af dollars, som den sydafrikanske telegigant repatrierede Nigerias centralbank har beordret den sydafrikanske telekomgigant MTN til at tilbage
Nigeria beordrer S.Africas MTN til at refundere $8,13 miaMTN og Nigerias centralbank er i strid med milliarder af dollars, som den sydafrikanske telegigant repatrierede Nigerias centralbank har beordret den sydafrikanske telekomgigant MTN til at tilbage -
 Cyberkriminelle:Tingene er ved at blive meget mere forvirrende for digKredit:CC0 Public Domain Der er tre kasser på et bord. To er lavet af pap og forseglet med emballagetape. Den tredje er lavet af stål med en række låse, der blokerer for adgang. Naturligvis ,
Cyberkriminelle:Tingene er ved at blive meget mere forvirrende for digKredit:CC0 Public Domain Der er tre kasser på et bord. To er lavet af pap og forseglet med emballagetape. Den tredje er lavet af stål med en række låse, der blokerer for adgang. Naturligvis , -
 Elektronisk handske tilbyder menneskelignende funktioner til brugere af håndproteserEn elektronisk handske, udviklet af forskere fra Purdue University, tilbyder menneskelige funktioner til brugere af håndproteser. Kredit:Purdue University/Chris Adam Mennesker med håndamputationer
Elektronisk handske tilbyder menneskelignende funktioner til brugere af håndproteserEn elektronisk handske, udviklet af forskere fra Purdue University, tilbyder menneskelige funktioner til brugere af håndproteser. Kredit:Purdue University/Chris Adam Mennesker med håndamputationer
- En ny bioproces til at omdanne plantematerialer til værdifulde kemikalier
- Video:Permafrost i Arktis - hvad stigende temperaturer betyder for planeten
- Sådan beregnes H3O og OH
- For at behandle kræft, er kraften stærk med nanorobotter?
- Hawaii-land påvirket af havniveaustigning kan være dobbelte tidligere skøn
- Kabelinternet bringer både muligheder og risici for millioner af børn og unge i Stillehavet