


Har en simpel maskine kun en slags bevægelse?
Her er hvorfor:
* input- og outputbevægelser: Enkle maskiner har generelt en inputbevægelse (den kraft, du anvender) og en outputbevægelse (den resulterende kraft eller bevægelse). Disse bevægelser kan være forskellige i type (lineær vs. rotation) eller retning.
* interne bevægelser: Selv inden for en simpel maskine kan interne komponenter bevæge sig på forskellige måder for at opnå den samlede ønskede bevægelse. For eksempel kan en håndtag have en rotationsbevægelse i omdrejningen, mens belastningen oplever en lineær bevægelse.
Eksempler:
* håndtag: En håndtag har en rotationsbevægelse i Fulcrum, men det kan bruges til at bevæge en belastning lineært.
* hjul og aksel: Hjulet har en rotationsbevægelse, men akslen (som er forbundet til hjulet) kan bruges til at bevæge en belastning lineært.
* remskive: En remskive har en rotationsbevægelse, men den kan bruges til at løfte en belastning lodret.
Derfor, selvom enkle maskiner har en specifik funktion og primær bevægelse, involverer de ofte mere komplekse interne og samlede bevægelser for at opnå denne funktion.
 Varme artikler
Varme artikler
-
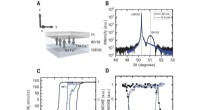 Hastigheden af magnetiske domænevægge viste sig at være fundamentalt begrænsetStrukturel og magnetisk karakterisering. Kredit: Videnskab , DOI:10.1126/science.aba5555 Et team af forskere fra MIT og flere institutioner i Korea har fundet ud af, at hastigheden af magnetisk
Hastigheden af magnetiske domænevægge viste sig at være fundamentalt begrænsetStrukturel og magnetisk karakterisering. Kredit: Videnskab , DOI:10.1126/science.aba5555 Et team af forskere fra MIT og flere institutioner i Korea har fundet ud af, at hastigheden af magnetisk -
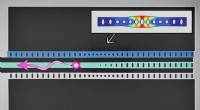 Undersøgelse af kvantefysik i makroskopisk skalaKredit:TU Delft Hvorfor fungerer kvantemekanik så godt for mikroskopiske objekter, alligevel er makroskopiske objekter beskrevet af klassisk fysik? Dette spørgsmål har generet fysikere siden kvant
Undersøgelse af kvantefysik i makroskopisk skalaKredit:TU Delft Hvorfor fungerer kvantemekanik så godt for mikroskopiske objekter, alligevel er makroskopiske objekter beskrevet af klassisk fysik? Dette spørgsmål har generet fysikere siden kvant -
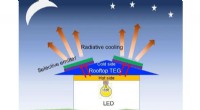 Forskere designer effektivt billigt system til at producere strøm om nattenForskere har designet et off-grid, billig modulær energikilde, der bruger strålekøling til effektivt at producere strøm til belysning om natten. Kredit:Lingling Fan og Wei Li, Stanford University
Forskere designer effektivt billigt system til at producere strøm om nattenForskere har designet et off-grid, billig modulær energikilde, der bruger strålekøling til effektivt at producere strøm til belysning om natten. Kredit:Lingling Fan og Wei Li, Stanford University -
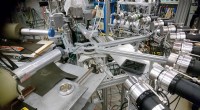 At rette op på en forkert, kernefysikere forbedrer præcisionen af neutrinoundersøgelserPå University of Notre Dame, en del af Oak Ridge Deuterated Spectroscopic Array målte en reaktion, der forårsager støj i nogle neutrino-detektorer. Kredit:Michael Febbraro/ORNL, US Department of Energ
At rette op på en forkert, kernefysikere forbedrer præcisionen af neutrinoundersøgelserPå University of Notre Dame, en del af Oak Ridge Deuterated Spectroscopic Array målte en reaktion, der forårsager støj i nogle neutrino-detektorer. Kredit:Michael Febbraro/ORNL, US Department of Energ
- Hvor går skydestjerner, efter at de streber over nattehimlen?
- Undersøgelse opdager ikke-gensidig antisymmetrisk transportadfærd i naturligt van der Waals ferrom…
- Hvilke skridt kan du tage for at opløse et opløst stof i løsningen den korteste tid?
- Kvinder har større succes med crowdfunding end mænd, siger undersøgelse
- Er der en reaktion mellem sølvnitrat og natriumsulfid?
- Hvad er 0,8 oz i ML?