


Hvad er ligningen for resulterende hastighed?
1. To hastigheder i rette vinkler:
* Pythagorean -sætning: Hvis du har to hastigheder,*V1*og*V2*, der fungerer i rette vinkler på hinanden, findes den resulterende hastighed (*V*) ved hjælp af Pythagorean -teoremet:
*v*² =*v1*² +*v2*²
* Find vinklen: Du kan også finde vinklen (θ) mellem den resulterende hastighed og en af de originale hastigheder ved hjælp af tangentfunktionen:
tan (θ) =*v2 * / *v1 *
2. To hastigheder i enhver vinkel:
* Lov om kosinus: Hvis de to hastigheder ikke er i rette vinkler, kan du bruge kosinens lov:
*v *² =*v1 *² + *v2 *² - 2 *v1 *v2 *cos (θ)
hvor θ er vinklen mellem de to hastigheder.
* Vector tilføjelse: Du kan også finde den resulterende hastighed ved at tilføje de to hastighedsvektorer head-to-hale. Den resulterende hastighed er den vektor, der starter ved halen af den første vektor og slutter ved hovedet af den anden vektor.
3. Flere hastigheder:
* Vector Summation: Hvis du har mere end to hastigheder, kan du finde den resulterende hastighed ved at tilføje alle de enkelte hastighedsvektorer. Dette kan gøres grafisk eller ved hjælp af vektorkomponenter.
Vigtige noter:
* Hastighed er en vektormængde, hvilket betyder, at den har både størrelse (hastighed) og retning.
* Resultathastigheden henviser til den samlede hastighed, der er resultatet af kombinationen af flere hastigheder.
* Det er vigtigt at overveje hastighedens retninger, når man beregner den resulterende hastighed.
Fortæl mig, hvis du har et specifikt scenario i tankerne, og jeg kan give en mere skræddersyet forklaring!
Sidste artikelKan bevægelsen af et objektændring afhængigt af rammehenvisning?
Næste artikelAnvender en kraft gennem afstand kendt som?
 Varme artikler
Varme artikler
-
 Ikke -lineær fysik bygger tanker til lyde i fuglesangEt par zebrafinker ved Bird Kingdom, Niagara Falls, Ontario, Canada. Kredit:Wikipedia Den smukke lyd af fuglesange, der dukker op fra træerne, er et vidunderligt eksempel på, hvor meget naturen st
Ikke -lineær fysik bygger tanker til lyde i fuglesangEt par zebrafinker ved Bird Kingdom, Niagara Falls, Ontario, Canada. Kredit:Wikipedia Den smukke lyd af fuglesange, der dukker op fra træerne, er et vidunderligt eksempel på, hvor meget naturen st -
 Rekordstor terahertz laserstråleClaudia Gollner og hendes lasersystem. Kredit:Vienna University of Technology Terahertz-stråling bruges til sikkerhedstjek i lufthavne, til lægeundersøgelser og også til kvalitetstjek i industrien
Rekordstor terahertz laserstråleClaudia Gollner og hendes lasersystem. Kredit:Vienna University of Technology Terahertz-stråling bruges til sikkerhedstjek i lufthavne, til lægeundersøgelser og også til kvalitetstjek i industrien -
 Kvantgas afslører de første tegn på monopol, der bøjer sigKredit:Joint Quantum Institute Magneter, om det er i form af en bar, hestesko eller elektromagnet, har altid to poler. Hvis du bryder en magnet på midten, du ender med to nye magneter, hver med si
Kvantgas afslører de første tegn på monopol, der bøjer sigKredit:Joint Quantum Institute Magneter, om det er i form af en bar, hestesko eller elektromagnet, har altid to poler. Hvis du bryder en magnet på midten, du ender med to nye magneter, hver med si -
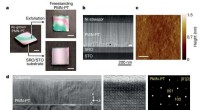 Crystal-stacking proces kan producere nye materialer til højteknologiske enhederPræcis epitaksial grænsefladeseparation af PMN-PT på et SRO/STO-substrat. Kredit: Natur (2020). DOI:10.1038/s41586-020-1939-z Det magnetiske, ledende og optiske egenskaber ved komplekse oxider gø
Crystal-stacking proces kan producere nye materialer til højteknologiske enhederPræcis epitaksial grænsefladeseparation af PMN-PT på et SRO/STO-substrat. Kredit: Natur (2020). DOI:10.1038/s41586-020-1939-z Det magnetiske, ledende og optiske egenskaber ved komplekse oxider gø
- Vinden tiltager, mens brandmænd kæmper mod brand i Californien
- Hvad står en i videnskaben?
- Hvad er de to vigtigste strukturer i lymfesystemet?
- Hvor gamle er de ældste klipper på havbunden sammenlignet med Jordens alder?
- Er et vind op legetøj, der afvikles et eksempel på elastisk potentiel energi?
- Hvordan man stopper løsladte fanger med at begå gentagelser:Hvad beviserne siger