


Programmerbar dråbe manipulation med en magnetisk aktiverings robot
Typisk adfærd for dråberne manipuleret ved hjælp af den magnetisk aktiverede robot. Kredit:Science Advances, doi:10.1126/sciadv.aay5808
Dråbe manipulation i materialevidenskab kan bidrage til vandopsamling, medicinsk diagnostik og medicinleveringsteknikker. Mens strukturbaserede flydende operationer er meget udbredt i naturen og i bioinspirerede kunstige materialer, laboratoriestrategier afhænger af faste strukturer til ensrettet vandbevægelse. I en ny undersøgelse om Videnskab fremskridt , En Li og et forskerhold ved Institute of Chemistry og University of Chinese Academy of Sciences i Kina foreslog at udvikle en magnetisk aktiveret robot. Konstruktionen havde justerbare strukturer til at fordele modstandskræfter og bestemme dråbeadfærd. Robotten kunne transportere, dele, frigive og rotere dråber til universelle anvendelser på forskellige områder og hårde miljøer. De nye fund tilbyder en effektiv strategi til automatiseret dråbe manipulation.
I dette arbejde, Li et al. brugte pålidelige metoder til at manipulere dråber ved hjælp af en magnetisk aktiveret robot med stålperler i et programmerbart magnetfelt. Forskerne kontrollerede robotens struktur ved at justere magnetfeltet. De differentierede robotstrukturer førte til forskellige dråbeadfærdsmæssige kombinationer, herunder split, frigøre, rotation og transport. Robotten er universelt anvendelig til forskellige væsker, herunder vand, olie og gas. Li et al. hjulpet robotaktivering på tværs af begrænsede rum, på ujævne overflader og endda under vandfri eller anaerobe forhold. Arbejdet har et stort potentiale for materialetransport, mikrofabrikation og i klinisk medicin.
Dråbe manipulation i laboratoriet er inspireret af naturen. For eksempel, planter og dyr har vist tågopsamlingssystemer i kaktusser, vandopsamling på edderkoppesilke og påvirkede Namib Desert billens adfærd til at opsamle og flytte vand. Den asymmetriske og iboende struktur til opsamling af vandprøver kan forårsage en Laplace -trykgradient i dråberne, forårsager bevægelse i en forudindstillet retning. Forskere kan bruge forskellige eksterne strategier, herunder elektricitet, magneter, akustik og befugtende overflader for at aktivere deres bevægelse. Af disse, magnetisk kraft har fordelen ved langtrækkende handling, sikkerhed og let kontrol. Forskere havde brugt magnetiske partikler til at trække vanddråber hen over hydrofobe eller mønstrede overflader og hen over magnetisk reagerende materialer.
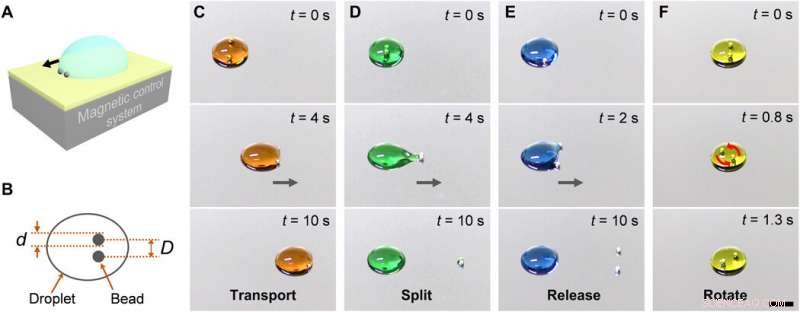
Skema og demonstration af den magnetisk aktiverede robot. (A) Skema for dråbe manipulationssystemet. (B) Parametre, der beskriver den magnetisk aktiverede robot. (C til F) Typisk adfærd for de dråber, der manipuleres af robotten. Dråber kan transporteres (C), split (D), frigivet (E), og roteret (F) af robotten. De grå pile repræsenterer robotternes bevægelsesretning. Bevægelseshastigheden er 2 mm/s. Dråbernes volumen er 250 pi. Skala bar, 5 mm. Kredit:Science Advances, doi:10.1126/sciadv.aay5808
Li et al. kaldte de to stålperler i det magnetiske kontrolsystem 'robotten' og farvede vanddråberne med tilsætningsstoffer til fødevarer for tydeligt at identificere forskellige virkemåder. Den hydrofile (vandelskende) robot fangede let dråben ved kontakt. Forskergruppen overførte dråben og justerede dens struktur for at dele en datterdråbe eller frigive dråben ved at reducere eller øge afstanden mellem perlerne. Processen baserede sig hovedsageligt på robotstrukturen, hvor dens volumen (V) påvirkede resultatet. Li et al. kvantificerede strukturen af robotten ved hjælp af perlernes center-til-center afstand til diameteren (D/d). For eksempel, en robot med et D/d -forhold på 1,67 kunne transportere en 150 µL dråbe vand. Imidlertid, hvis dråben forstørret til 350 µL, det ville splitte. For at forstå dette, de analyserede mekanisk hele systemet og bestemte derefter drivkraften bag enheden til at være vedhæftning mellem perlen og dråben.

Visning af de trinvise syrebaserede neutraliseringsreaktioner. Kredit:Science Advances, doi:10.1126/sciadv.aay5808
Efter at have kontrolleret vanddråben i luften, holdet undersøgte robotten under forskellige forhold, herunder forskellige atmosfærer. For eksempel, de trak en dråbe for at flytte den op eller ned ved at overvinde tyngdekræfter og vedhæftningskræfter mellem forskellige dråber og underlaget. Sådanne anordninger har applikationer i begrænsede rum, såsom kasser og rør, der er afgørende for mikrofluidik og klinisk medicin. Tabsfri transport og præcis reagenskontrol er afgørende for kvantitative kemiske mikroreaktioner, der i vid udstrækning anvendes inden for analytisk kemi, diagnostik og bioteknologi. For eksempel, Li et al. udført sekventielle syre-base neutraliseringsreaktioner via programmerbar dråbe manipulation af robotten, at dele en datterdråbe og overføre den til en neutral dråbe. Robotterne gav en alsidig rute til automatisk at kontrollere dråber til mikroreaktioner ved hjælp af præcise portioner af reagenser, der typisk er toksiske, radioaktive eller eksplosive i naturen.
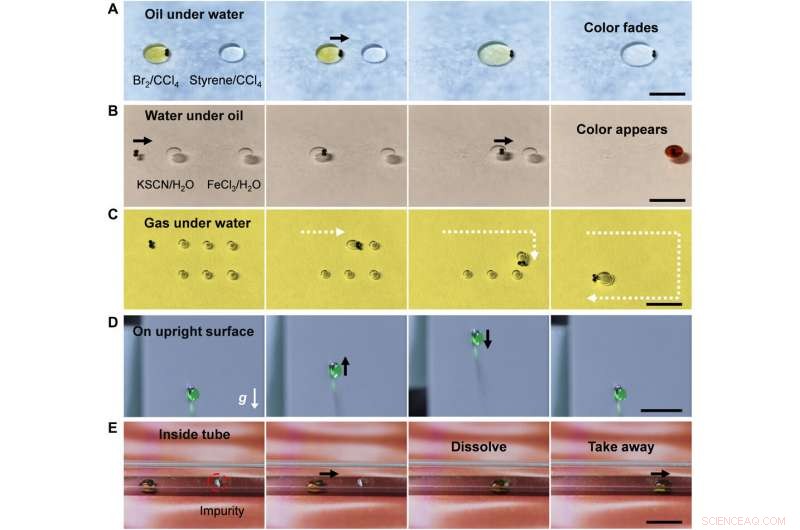
Generel demonstration af robotten. (A) manipulation af oliedråber under vand. Oliedråberne (100 pi) opløses CCl4 med Br2 (venstre) og styren (højre). Robotten transporterer den venstre dråbe for at blande sig med den højre. (B) manipulation af vanddråber under olie (n-heptadecan). Dråberne (50 pi) opløses i vand med KSCN (venstre) og FeCl3 (højre), henholdsvis. Den venstre dråbe fanges af robotten og transporteres til den rigtige. (C) manipulation af gasbobler under vand. En superhydrofobisk robot kan successivt opsamle gasboblerne (20 pi). Den hvide stiplede linje angiver robotens bane. (D) manipulation af en vanddråbe på den opretstående overflade. Robotten transporterer en 20 μl vanddråbe for at bevæge sig op og ned med en hastighed på 2 mm/s. (E) manipulation af en vanddråbe inde i et rør. En dråbe (20 pi) aktiveres af robotten for at fange urenheden inde i et rør. Efter 1 min. urenheden opløses og fjernes af dråben. Den røde stiplede cirkel angiver placeringen af urenheden. Den sorte pil angiver dråbes bevægelse. Målestænger, 10 mm. Kredit:Science Advances, doi:10.1126/sciadv.aay5808
Forskerne simulerede derefter biomedicinske processer i laboratoriet for at undersøge robotens potentiale under in vivo medicinske applikationer. De simulerede først calculi eller mineralforekomster fundet i organer som nyre og galdeblære, som generelt forbliver intakte på grund af strukturelle grænser, der forhindrer deres kirurgiske fjernelse. Brug af microrobot, de trak en lægemiddeldråbe videre til de simulerede beregninger til beregningerne for let opsamling og fjernelse (baseret på kompatibiliteten mellem de to overflader). I det næste forsøg, de viste robotens potentiale til at fjerne eller rydde blodkar ved at opbygge en overflod af kolesterol i kranspulsårerne - repræsenteret med et rør fyldt med vand. De transporterede lægemiddeldråberne for at fange den simulerede plak og opløste lægemidlet til bortskaffelse af robotten. De innovative metoder kan have alsidige funktioner til in vivo medicinske applikationer.
Simulering af medicinlevering. Kredit:Science Advances, doi:10.1126/sciadv.aay5808
På denne måde, En Li og kolleger foreslog en enkel og generel strategi til manipulation af dråber ved hjælp af en magnetisk aktiveret robot lavet af to stålperler. De kontrollerede strukturen ved hjælp af et magnetfelt, der regulerede fordelingen af resistive kræfter i dråbens forreste og bageste segment. De indså flere adfærd for dråberne, herunder transport, dele, frigivelse og rotation. Ud over at manipulere vanddråber i luften, robotten viste løfte om at transportere komplekse væsker som olie, vand-i-olie og gas-i-vand. Stålperlerne viste manøvredygtigheden af dråberne i begrænsede rum, herunder giftige og radioaktive miljøer. Arbejdet har et betydeligt potentiale inden for fremstilling af enheder, sensing og bioassay, såvel som inden for medicin in vivo. Teamet forestiller sig yderligere optimeringer af systemet vil muliggøre mindre dråbe manipulation i nano- og pico-liter skala med forbedret biokompatibilitet.
© 2020 Science X Network
Sidste artikelPorøs væske rummer større molekyler
Næste artikelSkinner nyt lys over biomimetiske materialer
 Varme artikler
Varme artikler
-
 Redesigner håndsprit og donerer 7, 000 gallons til at bekæmpe COVID-19Håndsprit reddet af ethanol. Et velgørende initiativ kørte for at forhindre håndsprit i at løbe kritisk lavt over hele landet. Kredit:Georgia Tech/Christopher Moore Så mange mennesker, Seth Marder
Redesigner håndsprit og donerer 7, 000 gallons til at bekæmpe COVID-19Håndsprit reddet af ethanol. Et velgørende initiativ kørte for at forhindre håndsprit i at løbe kritisk lavt over hele landet. Kredit:Georgia Tech/Christopher Moore Så mange mennesker, Seth Marder -
 Hvordan er stålrør fremstillet?Der er to typer stålrør: svejset og sømløst. Enhver type kan være lavet af en hvilken som helst legering af stål, der er formbar. Svejset rør kræver, at legeringen kan svejses. Svejset rør begynder so
Hvordan er stålrør fremstillet?Der er to typer stålrør: svejset og sømløst. Enhver type kan være lavet af en hvilken som helst legering af stål, der er formbar. Svejset rør kræver, at legeringen kan svejses. Svejset rør begynder so -
 Carbon nanokompositter er nu et skridt tættere på praktisk industriCarbon-nanokomposit efter afslutning af støbeprocessen. Prøven vil blive testet for piezoresistiv respons efter mindre efterbehandling. Disse materialer kan formes til næsten enhver størrelse og form.
Carbon nanokompositter er nu et skridt tættere på praktisk industriCarbon-nanokomposit efter afslutning af støbeprocessen. Prøven vil blive testet for piezoresistiv respons efter mindre efterbehandling. Disse materialer kan formes til næsten enhver størrelse og form. -
 Ny sensorteknologi muliggør superfølsom live overvågning af menneskelige biomolekylerEt stillbillede fra videoen, der forklarer konceptet. Kredit:ICMS Animation Studio Menneskekroppen er en ekstremt kompleks molekylær maskine, hvis detaljer kan følges gennem visse stoffer; såkaldt
Ny sensorteknologi muliggør superfølsom live overvågning af menneskelige biomolekylerEt stillbillede fra videoen, der forklarer konceptet. Kredit:ICMS Animation Studio Menneskekroppen er en ekstremt kompleks molekylær maskine, hvis detaljer kan følges gennem visse stoffer; såkaldt
- Internettet kan klare stigningen i USA og Europas lockdown:Nokia
- Stigende vejafgifter fra monsunoversvømmelser hæmmer Sydasien-virusindsatsen
- Galaxy Haro 14 udforsket med MUSE
- Global undersøgelse bekræfter indflydelsesrig teori bag tabaversion
- Østrigske forskere letter lipiddataanalyse
- Ny computermodelleringstilgang kan forbedre materialedesign på tværs af flyskrog