


Forskere opnår femtosekund-laserfremstilling af magnetisk-responsive Janus origami-robotter
Den alsidige manipulation af dråber på tværs af forskellige skalaer har et betydeligt løfte på forskellige områder, især inden for præcisionskemi og biomedicinsk diagnostik. Fra et praktisk synspunkt kræver effektive dråbemanipulationsteknikker multifunktionel integration og anvendelighed på tværs af forskellige skalaer.
Magnetisk excitation har vundet udbredt anvendelse inden for dråbemanipulation på grund af dens fordele, såsom fjernstyrbarhed, biokompatibilitet, ufølsomhed over for miljøfaktorer som substratladning og fremragende gennemsigtighed. Udvidelse af mulighederne for magnetisk responsiv dråbemanipulation og udvidelse af de forskellige funktionaliteter fra mikroliter til nanoliter skalaer er dog stadig store udfordringer.
Som svar på denne udfordring udviklede professor Hu Yanlei og hans forskerhold fra Micro/Nano Engineering Laboratory ved University of Science and Technology of China (USTC) i Chinese Academy of Sciences (CAS) i samarbejde med andre forskere en magnetisk aktiveret Janus origami robot ved hjælp af femtosekund laser nanofabrikationsteknikker.
Denne robot muliggør effektiv integration af forskellige dråbemanipulationsfunktioner, herunder tredimensionel dråbetransport, sammensmeltning, spaltning, præcis dispensering og on-demand frigivelse af datterdråber samt omrøring og fjernopvarmning.
Derudover udviser denne manipulationsstrategi bemærkelsesværdig stabilitet og giver mulighed for manipulation af dråber, der spænder over volumener fra ca. 3,2 nanoliter til ca. 51,14 mikroliter. Resultaterne af denne forskning, med titlen "Magnetic Janus origami robot for cross-scale droplet omni-manipulation," er blevet offentliggjort i Nature Communications .
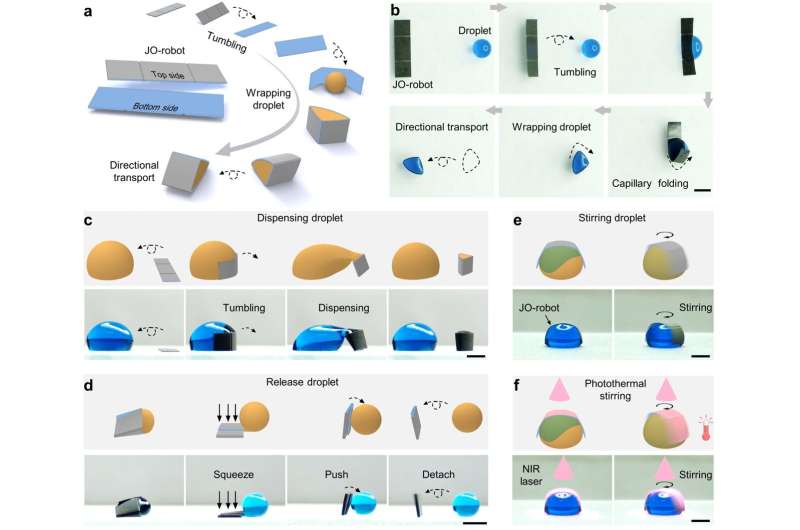
De øvre og nedre overflader af den magnetisk responsive tolags Janus origami-robot udviser tydelige befugtningsegenskaber. Robottens øvre overflade er i en superhydrofob tilstand med lav dråbeadhæsion, mens den nederste overflade er hydrofob med høj dråbeadhæsion.
Samtidig er to folder designet på robottens øvre overflade for at lette spontan indkapsling af dråber under kapillære kræfter ved kontakt. Robottens overordnede profil, folder og overflademikro/nano-funktionelle strukturer fremstilles og modificeres gennem femtosekund laserscanning.
Drevet af et magnetfelt nærmer robotten sig aktivt og indkapsler vanddråber ved at rulle, hvilket muliggør kontrolleret dråbetransport. Ydermere kan den magnetisk responsive tolags Janus origami-robot fordele datterdråber fra større dråber gennem rettet rulning og foldning.
Ved at styre magnetfeltstyrken kan de fordelte datterdråber ekstruderes fra robotten. Ved at udnytte sit specialdesignede superhydrofobe ydre skubber robotten forsigtigt dråberne til kontrolleret frigivelse og adskillelse. Robotten kan også rotere under påvirkning af magnetfeltet og opnå kontrolleret væskeblanding og, i kombination med dens fototermiske egenskaber, muliggøre fjernopvarmning.
Magnetisk-responsive Janus origami-robotter er blevet udviklet til at muliggøre alsidig dråbemanipulation på tværs af skala, der tilbyder funktioner, der ligner kommercielle magnetomrørere. Ud over hurtig blanding af vand udviser disse robotter evnen til effektivt at blande væsker med høj viskositet såsom glycerol gennem deres opvarmnings- og omrøringsfunktioner og opnå temperaturer på over 80°C.
De magnetisk-responsive Janus origami-robotter bygger på deres forskellige dråbemanipulationsfunktioner og integrerer problemfrit forskellige dråbehåndteringsfunktioner for at opnå kontinuerlige dråbemanipulationsmål. For eksempel nærmer robotterne sig selvstændigt vanddråber gennem rullende bevægelser, dispenserer specifikke volumener af datterdråber, transporterer disse dispenserede datterdråber for at smelte sammen med andre dråber og letter endelig hurtig blanding af dråber med forskellige komponenter gennem omrøring. Denne multifunktionelle integration af dråbemanipulation strækker sig problemfrit til nanoliterskalaen.
I en proof-of-concept demonstration gennemførte robotterne, efter overflademodifikationer, med succes ekstraktion og oprensning af nukleinsyrer.
Sammenfattende muliggør magnetisk-responsive Janus origami-robotter dråbemanipulation på tværs af skala, hvilket har betydelige implikationer for præcis reagenslevering, mikrodråbemønstre og hurtige mikrodråbereaktioner inden for forskellige områder, såsom finkemiteknik, medicinsk diagnostik og mikrofluidisk teknologi.
Flere oplysninger: Shaojun Jiang et al., Magnetic Janus origami robot til cross-scale dråbe omni-manipulation, Nature Communications (2023). DOI:10.1038/s41467-023-41092-1
Journaloplysninger: Nature Communications
Leveret af University of Science and Technology i Kina
 Varme artikler
Varme artikler
-
 Nanokoner kan være nøglen til at lave billige solceller(a) Fremstillingsproces for solcellerne, hvor siliciumnanokoner er belagt med en polymer. (b), (c), og (d) viser scanningselektronmikroskopbilleder af nanokoner efter hvert trin. Billedkredit:Jeong, e
Nanokoner kan være nøglen til at lave billige solceller(a) Fremstillingsproces for solcellerne, hvor siliciumnanokoner er belagt med en polymer. (b), (c), og (d) viser scanningselektronmikroskopbilleder af nanokoner efter hvert trin. Billedkredit:Jeong, e -
 Nano-politiforureningnanotråd Forurenende stoffer, der udsendes af fabrikker og bilers udstødning, påvirker mennesker, der indånder disse skadelige gasser og forværrer også klimaændringerne oppe i atmosfæren. At kunne
Nano-politiforureningnanotråd Forurenende stoffer, der udsendes af fabrikker og bilers udstødning, påvirker mennesker, der indånder disse skadelige gasser og forværrer også klimaændringerne oppe i atmosfæren. At kunne -
 Atomkraftmikroskopi afslører høj heterogenitet i bakterielle membranvesikler(A) Scanning elektronmikroskopisk billede af en bakteriecelle og ekstracellulære membranvesikler (MVer). (B) Skematisk tegning af MVs observation ved hjælp af atomkraftmikroskopi fasebilleddannelse. (
Atomkraftmikroskopi afslører høj heterogenitet i bakterielle membranvesikler(A) Scanning elektronmikroskopisk billede af en bakteriecelle og ekstracellulære membranvesikler (MVer). (B) Skematisk tegning af MVs observation ved hjælp af atomkraftmikroskopi fasebilleddannelse. ( -
 Topologiske grafen -nanoribber fanger elektroner til nye kvantematerialerScanning af tunnelmikroskopbillede af et topologisk nanoribbon -supergitter. Elektroner er fanget i grænsefladerne mellem brede båndsegmenter (som er topologisk ikke-trivielle) og smalle båndsegmenter
Topologiske grafen -nanoribber fanger elektroner til nye kvantematerialerScanning af tunnelmikroskopbillede af et topologisk nanoribbon -supergitter. Elektroner er fanget i grænsefladerne mellem brede båndsegmenter (som er topologisk ikke-trivielle) og smalle båndsegmenter
- God undskyldning, eller er der faktisk et snyd-gen?
- Forskere dykker dybt ind i en skjult verden af kvantetilstande
- Forskere kvantificerer lægemiddellevering fra nanopartikler inde i en celle
- Forskere udvikler et kompakt infrarødt spektrometer
- 5 fakta om jordens indre kerne
- Kæmpe ringlignende struktur på Ganymedes overflade kan være forårsaget af voldsom påvirkning (O…