


En robot lavet af is kunne tilpasse sig og reparere sig selv på andre verdener
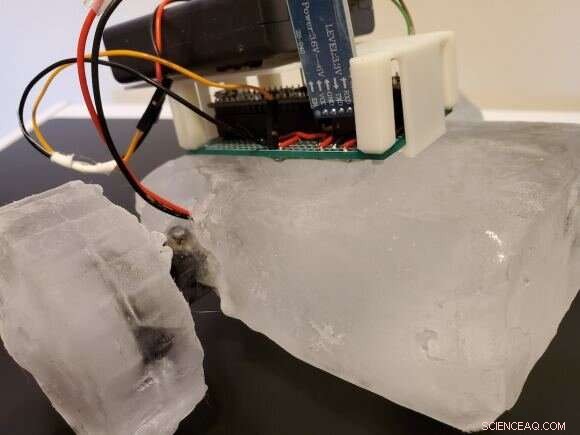
IceBot er bare et koncept lige nu, med nogle strukturelle dele lavet af is. Kredit:GRASP Lab
Nogle af de mest fristende mål i udforskning af rummet er frosne isverdener. Tag Jupiters måne Europa, for eksempel. Det er varmt, salt hav under overfladen er begravet under et månebredt islag. Hvad er den bedste måde at udforske det på?
Måske kunne en isrobot spille en rolle.
Selvom verdens rumorganisationer - især NASA - bliver bedre og bedre til at bygge robotter til at udforske steder som Mars, disse robotter har begrænsninger. Den vigtigste blandt disse begrænsninger er måske muligheden for sammenbrud. Når en rover på Mars – eller et sted endnu længere væk – bryder sammen, det er spillet slut. Der er ingen gennemførlig måde at reparere noget som MSL Curiosity, hvis det går i stykker, mens man udforsker Mars-overfladen.
Men hvad nu hvis verden, der blev udforsket, var en frossen en, og robotten var lavet af is? Kunne iskolde robotter udføre selvreparation, selv på en begrænset måde? Kunne de rent faktisk fremstilles og samles der, endda delvist?
Et nyligt papir med titlen "Robots Made From Ice:An Analysis of Manufacturing Techniques" undersøgte denne mulighed. Papiret blev præsenteret på 2020 IEEE (Institute for Electrical and Electronics Engineers) International Conference on Robotics and Systems. Devin Carroll og Mark Yim skrev det. Carroll er ph.d. robotteknologistuderende ved University of Pennsylvania, og Yim er direktør for Grasp Lab og professor i maskinteknik ved samme institution.
Hele robotten ville ikke være lavet af is, naturligvis. Men noget af strukturen kunne være. Ideen er centreret omkring et modulært design, der kunne reparere sig selv eller endda selvreplikere og kunne færdiggøres in-situ efter implementering, engang blev terrænforhindringer og detaljerne i missionens opgaver bedre forstået.
I deres abstrakte, de to forfattere skriver, "Isen giver mulighed for øget fleksibilitet i systemdesignet, gør det muligt at designe og bygge robotstrukturen efter implementering, efter at opgaver og terrænforhindringer er blevet bedre identificeret og analyseret."
Naturligvis, der er en masse problemer og forhindringer med denne potentielle teknologi. Men sådan begynder de alle sammen.
Forfatterparret gør det klart, at dette er et foreløbigt arbejde. "Forfatterne udforsker en strukturdrevet tilgang til at undersøge kompatible fremstillingsprocesser med vægt på at bevare procesenergier, " skriver de. "En mobil robotplatform lavet af is præsenteres som et proof of concept og første demonstration."
Idéen er centreret om en tohjulet rover ved navn Icebot. Icebot er baseret på designet til antarktiske rovers og har strukturelle elementer lavet af is.
I deres arbejde, Forfatterparret udførte eksperimenter for at udforske hele ideen. Arbejdet var baseret på to antagelser:
- Robotten vil køre i minusgrader, og alle deres beregninger er baseret på gennemsnitlige årlige temperaturer på McMurdo station i Antarktis.
- Isblokke er let tilgængelige.
Deres papir præsenterer også tre generelle designprincipper.
- Komponenter skal designes til at håndtere varme.
- Alt elektronik, aktuatorer og strømkilder skal være isoleret fra smeltning.
- Den ideelle metode til at forme robottens iskomponenter afhænger af delens endelige volumen i forhold til det volumen, der skal fjernes fra en rå isplade.
Der er en anden overordnet betingelse i alt dette, også. For robotter, der opererer på andre verdener, energi er en værdifuld vare. Hver mission har et energibudget, der styres omhyggeligt. Tag rumfartøjet Voyager, for eksempel. Deres imponerende levetid skyldes i det mindste delvist ekstremt omhyggelig brug af energi. Så mængden af energi en isrobot bruger til at fremstille og bygge sig selv er kritisk.
Med disse forhold for øje, forskerne kom med nogle interessante ideer.
Først og fremmest, hele scenariet ville sandsynligvis involvere ikke en enkelt robot, men et par, opererer i tandem. En enhed ville være det primære efterforskningskøretøj, og det andet ville være lidt som et moderskib og ville have produktions- og reparationsmulighederne.
I et interview med IEEE spektrum , Devin Carroll forklarede, hvordan dette kunne se ud. "Når jeg tænker på en arktisk (eller planetarisk) udforskningsrobot, der inkorporerer selvmodifikations- eller reparationsmuligheder, forestiller jeg mig et system med to typer robotter - den første udforsker miljøet og indsamler materialer, der er nødvendige for at udføre selvforøgelse eller reparation, og det andet er en slags manipulator/fremstillingssystem. Vi kan forestille os, at robottens udforskningsklasse vender tilbage til et centraliseret sted med en anmodning om en plov eller en anden forstørrelse, og produktionssystemet vil være i stand til at fastgøre forstørrelsen direkte til robotten."
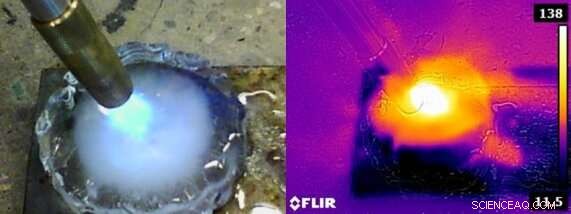
Forskerne testede en åben flamme som en metode til at smelte huller i isen, som robottens aktuator kan sættes ind i. Til venstre:En butan fakkel bruges til at smelte et hul i isemnet. Til højre:Et varmekort (i grader C) over butanbrænderen og isemnet. Kredit:Carroll og Yim, 2020
Forskerparret udførte nogle tests for at konkretisere deres ideer. De så på forskellige måder at manipulere is på. Til fremstilling, de så på støbning, hvor is først smeltes og derefter hældes i en form, der skal formes. De så også på 3D-print, og bearbejdning. Hver metode har sine fordele og ulemper, og hver enkelt har forskellige energibehov.
De så også på aktuatorintegration. Som forklaret, aktuatorer i sig selv kan ikke være lavet af is. Aktuatorer udsættes for forskellige belastninger, is kan ikke klare det. Så integrationen af aktuatorerne med komponenter lavet af is er en kritisk operation.
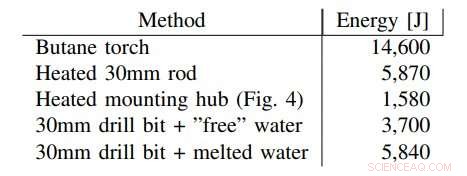
De eksperimenterede med fire forskellige måder at integrere aktuatorer på:
- Mekanisk udskæring med noget som en mejsel.
- Smeltning af et hul til aktuatoren med åben ild.
- Oprettelse af et hul til aktuatoren med en opvarmet metalstang.
- Skæring, for eksempel, med en hulsav.
Hver af metoderne har deres styrker og svagheder. Hver enkelt har også sit eget energibehov. Tabellen nedenfor viser den energi, der kræves for hver metode til at skabe en monteringslomme til aktuatoren, og fryse det på plads.
Da dette er forarbejde, holdet nåede ikke til nogen permanente konklusioner. Men deres eksperimenter afslørede nogle faldgruber, som skal overvindes, hvis in-situ isfremstilling og reparation nogensinde skal implementeres effektivt.
De fandt ud af, at vedhæftningens overfladeareal er afgørende for succes, hvilket ikke er en overraskelse. I en nøddeskal, et større overfladeareal i leddet er bedre, og hjælper isen med at modstå spændinger på grund af drejningsmoment og andre kræfter. Istykkelsen var også et problem, hvilket heller ikke er overraskende.
Forfatterne opsummerer deres arbejde i papirets konklusion. "Dette arbejde er et skridt mod en letvægter, tilpasningsdygtigt robotsystem, der kan fungere i miljøer under nul. Dette system egner sig til selvrekonfiguration, selvreplikation og selvreparation, " de skriver.
"For at skubbe mod udviklingen af automatiserede metoder til oprettelse og samling af dette system planlægger vi at forfølge et fælles modul, der nemt kan integreres med passive isblokke, " skriver de. Det ville gøre IceBot-systemet enklere og mere modulært.
De forklarede også, hvad fremtiden bringer for deres IceBot-koncept:"Yderligere fremtidigt arbejde omfatter:at bestemme en generel overfladeklasse, som dette system kan bevæge sig på, metoder til at bruge iselementer til at interagere med miljøet, og yderligere undersøgelse af styrkegrænserne for forbindelserne mellem aktuatorer og isen."
I den Spektrum IEEE interview, Carroll talte også om, hvad der er det næste for deres IceBot-indsats og understregede behovet for modularitet. "Mit umiddelbare fokus er på at designe en modulær samling, som vi kan bruge til nemt og sikkert at forbinde aktuatorer med isblokke samt arbejde på at udvikle en sluteffektor, der vil give os mulighed for at manipulere isblokke uden permanent at deformere dem via skruehuller eller andet. , lignende tilslutningsmetoder."
Der er meget arbejde, der skal gøres, før nogen isrobotteknologi kan implementeres. Men det er en spændende udvikling, og Europa og Enceladus venter. Agenturer som NASA ser nærmere på in-situ ressourcer til deres missioner til Månen og Mars.
Is er almindelig i solsystemet. Rummet er koldt, og mange kroppe er dækket af is. Kunne en in-situ IceBot være i fremtiden?
 Varme artikler
Varme artikler
-
 Billede:X-plane foreløbig designmodel tester støjsvag supersonisk teknologiKredit:NASA/Chris Giersch Samantha OFlaherty, Testingeniør for Jacobs Technology Inc., færdiggør opsætningen af Quiet Supersonic Technology (QueSST) foreløbig designmodel inde i 14 x 22 fods sub
Billede:X-plane foreløbig designmodel tester støjsvag supersonisk teknologiKredit:NASA/Chris Giersch Samantha OFlaherty, Testingeniør for Jacobs Technology Inc., færdiggør opsætningen af Quiet Supersonic Technology (QueSST) foreløbig designmodel inde i 14 x 22 fods sub -
 Prøvetid for NASAs asteroide-sampling-rumfartøjDenne kunstners koncept viser banen og konfigurationen af NASAs OSIRIS-REx rumfartøj under Checkpoint-prøven, hvilket er første gang, missionen vil øve de indledende trin til at indsamle en prøve fr
Prøvetid for NASAs asteroide-sampling-rumfartøjDenne kunstners koncept viser banen og konfigurationen af NASAs OSIRIS-REx rumfartøj under Checkpoint-prøven, hvilket er første gang, missionen vil øve de indledende trin til at indsamle en prøve fr -
 Kina vil bygge månestation om cirka 10 årKina blev den første nation til at lande en rover på den anden side af månen, da dens Change-4 landede i januar Beijing planlægger at sende en bemandet mission til månen og bygge en forskningsstat
Kina vil bygge månestation om cirka 10 årKina blev den første nation til at lande en rover på den anden side af månen, da dens Change-4 landede i januar Beijing planlægger at sende en bemandet mission til månen og bygge en forskningsstat -
 Mars oceaner dannet tidligt, muligvis hjulpet af massive vulkanudbrudDet tidlige hav kendt som Arabien (venstre, blå) ville have set sådan ud, da den blev dannet for 4 milliarder år siden på Mars, mens Deuteronilus -havet omkring 3,6 milliarder år gammel, havde en mind
Mars oceaner dannet tidligt, muligvis hjulpet af massive vulkanudbrudDet tidlige hav kendt som Arabien (venstre, blå) ville have set sådan ud, da den blev dannet for 4 milliarder år siden på Mars, mens Deuteronilus -havet omkring 3,6 milliarder år gammel, havde en mind
- Fund kan forbedre modeller, der gør det muligt at forudsige fremtidens klima
- Reglerne for opdeling af eksponenter
- Sådan tilsluttes en høj- og lavspændings trefase-motor
- Science fiction udforsker den indbyrdes sammenhæng, der er afsløret af coronavirus-pandemien
- Høje sneniveauer indikerer meget svage nordiske elpriser denne sommer
- Hvordan Lets Encrypt fordoblede internets procentdel af sikre websteder på fire år