


En interaktiv drone til at hjælpe mennesker i kontormiljøer
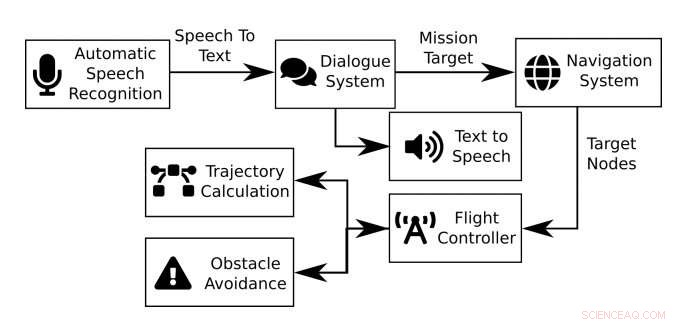
Et overblik over systemet. Kredit:Fuhrman et al.
Forskere ved Karlsruhe Institute of Technology i Tyskland har for nylig udviklet en interaktiv drone designet til at hjælpe mennesker i indendørs miljøer såsom kontorer eller laboratorier. I et papir, der er forudgivet på arXiv, forskerne præsenterede de resultater, deres drone opnåede, når de udførte simple opgaver i laboratoriet.
"I denne avis, vi præsenterer en indendørs kontor droneassistent, der har til opgave at løbe ærinder og udføre simple opgaver på vores laboratorium, mens vi får instruktioner fra og interagerer med mennesker i rummet, "skrev forskerne i deres papir.
Metoden til at designe dronen, som forskerne har vedtaget, er centreret omkring begrebet "missioner, "hvilket indebærer modtagelse af inputparametre og opfyldelse af vellykkede betingelser, eller "mål". For at fuldføre en mission, deres drone skal være i stand til at nå alle de mål, der er forbundet med det.
"I tilfælde af systemet præsenteret i dette papir, inputparameteren er en verbal anmodning om at flyve til en bestemt destination (værelse eller person) i et kontormiljø, " forklarede forskerne i deres papir. "Målet med missionen er at nå målet uden nogen manuel indgriben og kollision med statiske eller dynamiske forhindringer."
Den interaktive drone præsenteret af forskerne er en modificeret version af Crazyflie 2.0-dronen, designet af et firma kaldet Bitcraze. Det har flere komponenter:et automatisk talegenkendelse (ASR) subsystem, der transskriberer en brugers verbale anmodninger; et dialogsystem, der modtager disse anmodninger, behandler dem og identificerer målet på kontoret, og en flyvekontroller, der planlægger dronens bane til det ønskede mål, mens de forsøger at undgå kollisioner med forhindringer.
Forskerne besluttede at evaluere hver af systemets komponenter separat for klart at identificere funktioner, der skulle perfektioneres. For at evaluere dialogsystemet, de bad tre personer, der ikke har engelsk som modersmål, om at give simple verbale instruktioner højt, for eksempel, beordre dronen til at flyve til et andet rum eller besøge en anden person i laboratoriet.
Efterfølgende, forskerne testede deres drones dybdeopfattelse og kollisionsundgåelsesevner ved at præsentere dronen for tre forskellige typer forhindringer:en lukket dør, en person, og en metalbænk. Endelig, de undersøgte den hastighed, hvormed deres system kunne gennemføre missioner med succes ved at sende det til forskellige målrum ved hjælp af skriftlige instruktioner.

En af de Crazylife-droner, som forskerne brugte. Kredit:Fuhrman et al.
Mens, dronen blev fundet til at fuldføre missioner med en succesrate på 77,78 procent, de fandt ud af, at det havde flere begrænsninger. For eksempel, en af de mest almindelige årsager til missionsfejl var, at dronen drejede lidt under take-off, da dens fire propeller begyndte at fungere på lidt forskellige tidspunkter.
"Da dette er vores første prototype, der er masser af plads til fremtidige forbedringer, ikke kun på hver af de enkelte komponenter, men også på systemet som helhed, " sagde forskerne.
Holdet observerede, at dronens dialogsystem fungerede særligt dårligt og i bedste fald kunne forstå en persons instruktioner i 57 procent af tilfældene. Hovedproblemet med dialogsystemet var, at ASR havde vanskeligheder med at identificere folks navne, når de blev talt af brugere, dermed afbryde talegenkendelsesprocessen for tidligt.
"I det fremtidige arbejde, vi ønsker at bruge et forbedret ARS-system, " skrev forskerne i deres papir. "Desuden, for at tillade et bredere udvalg af naturligt sprog uden at øge størrelsen af træningsdatasættet, vi ønsker også at bruge en multi-task tilgang. Det betyder, at dronedatasættet vil blive trænet sammen med et datasæt uden for domænet."
I de indledende tests, dronens kollisionsdetekteringskomponent fungerede bemærkelsesværdigt godt, effektivt forhindrer kollisioner med både mennesker og store genstande i de fleste tilfælde. Imidlertid, det viste sig at kæmpe med at opdage meget tynde eller gennemskinnelige møbler. For at overvinde denne begrænsning, teamet planlægger nu at skabe en mere præcis, real-time kort over det omgivende miljø, som pt. systemet baserer sine forudsigelser på et forudindspillet 2-D-kort.
"Reduktion af positionsfejl bør også bidrage til at forbedre vores samlede mission succesrate, da dette var en af hovedårsagerne til missionsfejl under vores test, " forklarede forskerne i deres papir. "Det andet problem, der dukkede op under vores test, var dybdeopfattelsessystemet, der fungerede dårligt under meget lyse eller skiftende lysforhold. Vi planlægger også at behandle disse spørgsmål i fremtiden. "
I øvrigt, i deres næste studier, forskerne vil gerne forbedre systemets batterilevetid og batteristyring, som i øjeblikket, den kan kun gennemføre tre eller fire missioner, før den skal genoplades. De vil i sidste ende gerne øge dette tal betydeligt, samtidig med at de kommer med nye løsninger, der kan hjælpe med at afbøde dette problem.
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Langtidshukommelsesnetværk klarer sig bedre ved kontinuerlig estimeringFig.1. Resumé af NRMSE for LSTM, RBF og SPGP til 6 bevægelser. Kredit:LIN Chuang Surface electromyography (sEMG) er en ikke-invasiv, computerbaseret teknik, der kan registrere elektriske impulser.
Langtidshukommelsesnetværk klarer sig bedre ved kontinuerlig estimeringFig.1. Resumé af NRMSE for LSTM, RBF og SPGP til 6 bevægelser. Kredit:LIN Chuang Surface electromyography (sEMG) er en ikke-invasiv, computerbaseret teknik, der kan registrere elektriske impulser. -
 Zuckerberg møder EU-embedsmænd, mens blokkens nye teknologiregler tårner sig opFacebooks administrerende direktør Mark Zuckerberg smiler, mens han giver hånd med EU-kommissæren for værdier og gennemsigtighed Vera Jourova forud for et møde i EUs hovedkvarter i Bruxelles, Mandag,
Zuckerberg møder EU-embedsmænd, mens blokkens nye teknologiregler tårner sig opFacebooks administrerende direktør Mark Zuckerberg smiler, mens han giver hånd med EU-kommissæren for værdier og gennemsigtighed Vera Jourova forud for et møde i EUs hovedkvarter i Bruxelles, Mandag, -
 SK Hynix overskud faldt med 69 % i første kvartalSK Hynix forudsagde, at efterspørgslen efter deres DRAM-chips, der bruges i smartphones, vil stige i år Sydkoreas SK Hynix, verdens næststørste producent af hukommelseschips, så driftsoverskuddet
SK Hynix overskud faldt med 69 % i første kvartalSK Hynix forudsagde, at efterspørgslen efter deres DRAM-chips, der bruges i smartphones, vil stige i år Sydkoreas SK Hynix, verdens næststørste producent af hukommelseschips, så driftsoverskuddet -
 SunTrusts netbankproblemer indtræder på tredje dagDenne 7. maj 2009, filbillede viser SunTrusts hovedkvarter i Atlanta. Kunder i den store regionale bank SunTrust oplever en tredje dag med udfald og vanskeligheder fra deres netbanktjenester, et særli
SunTrusts netbankproblemer indtræder på tredje dagDenne 7. maj 2009, filbillede viser SunTrusts hovedkvarter i Atlanta. Kunder i den store regionale bank SunTrust oplever en tredje dag med udfald og vanskeligheder fra deres netbanktjenester, et særli
- Sådan konverteres kvadratmeter til tommer
- Gør verden varmere:Indier forventede AC -eksplosion
- Størrelse 4,9 efterskælv i Californiens jordskælv føltes bredt
- Vælg håb eller klimaovergivelse, siger FN -chef
- Brugere af genetiske herkomsttest vælger kirsebær, hvilke racer de skal identificere sig med
- Eleverne opdager skjult tekst fra det 15. århundrede på middelalderlige manuskripter