


10 sværeste ting at lære en robot
 Hej, robotter kan spille fangst. Robot Justin, et humanoidt system med to arme, udviklet af det tyske luft- og rumagentur, Deutsches Zentrum fur Luft- und Raumfahrt, kan udføre givne opgaver selvstændigt såsom at fange bolde eller servere kaffe. Se flere robotbilleder. © Michael Dalder/Reuters/Corbis
Hej, robotter kan spille fangst. Robot Justin, et humanoidt system med to arme, udviklet af det tyske luft- og rumagentur, Deutsches Zentrum fur Luft- und Raumfahrt, kan udføre givne opgaver selvstændigt såsom at fange bolde eller servere kaffe. Se flere robotbilleder. © Michael Dalder/Reuters/Corbis At være et menneske er langt lettere end at bygge et menneske.
Tag noget så simpelt som at spille fangst med en ven i forhaven. Når du opdeler denne aktivitet i de diskrete biologiske funktioner, der kræves for at udføre den, det er slet ikke simpelt. Du har brug for sensorer, sendere og effektorer. Du skal beregne, hvor svært du skal kaste baseret på afstanden mellem dig og din ledsager. Du skal tage højde for solblænding, vindhastighed og distraktioner i nærheden. Du skal bestemme, hvor fast du skal gribe bolden, og hvornår du skal klemme vanten under en fangst. Og du skal være i stand til at behandle en række hvad-hvis-scenarier:Hvad hvis bolden går over mit hoved? Hvad hvis det ruller ud på gaden? Hvad hvis det går ned gennem min nabos vindue?
Disse spørgsmål demonstrerer nogle af de mest presserende udfordringer inden for robotik, og de satte scenen for vores nedtælling. Vi har samlet en liste over de 10 sværeste ting at lære robotter, der stort set er ordnet fra "letteste" til "sværeste" - 10 ting, vi skal erobre, hvis vi nogensinde vil realisere de løfter, Bradbury har givet, Dick, Asimov, Clarke og alle de andre historiefortællere, der har forestillet sig en verden, hvor maskiner opfører sig som mennesker.
Indhold- Blaze a Trail
- Vis fingerfærdighed
- Hold en samtale
- Få nye færdigheder
- Øv bedrag
- Forvent menneskelige handlinger
- Koordinere aktiviteter med en anden robot
- Tag kopier af sig selv
- Lov baseret på etisk princip
- Føl følelser
10:Blaze a Trail
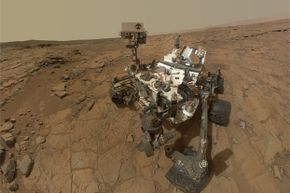 Den ultimative navigationstest for en robot:Mars! Indtil nu, Nysgerrighed har vist sig at være temmelig dygtig. Billede med tilladelse fra NASA/JPL-Caltech/MSSS
Den ultimative navigationstest for en robot:Mars! Indtil nu, Nysgerrighed har vist sig at være temmelig dygtig. Billede med tilladelse fra NASA/JPL-Caltech/MSSS At flytte fra punkt A til punkt B lyder så let. Vi mennesker gør det hele dagen, hver dag. For en robot, selvom, navigation - især gennem et enkelt miljø, der konstant ændrer sig eller blandt miljøer, det aldrig er stødt på før - kan være en vanskelig forretning. Først, robotten skal være i stand til at opfatte sit miljø, og så skal den kunne give mening om de indgående data.
Robotikere behandler det første problem ved at bevæbne deres maskiner med en række sensorer, scannere, kameraer og andre højteknologiske værktøjer til at vurdere deres omgivelser. Laserskannere er blevet stadig mere populære, selvom de ikke kan bruges i vandmiljøer, fordi vand har en tendens til at forstyrre lyset og dramatisk reducerer sensorens rækkevidde. Sonar -teknologi tilbyder en levedygtig mulighed i undervandsrobotter, men i landbaserede applikationer, det er langt mindre præcist. Og, selvfølgelig, et synssystem bestående af et sæt integrerede stereoskopiske kameraer kan hjælpe en robot med at "se" sit landskab.
Indsamling af data om miljøet er kun halvdelen af kampen. Den større udfordring indebærer behandling af disse data og brug af dem til at træffe beslutninger. Mange forskere får deres robotter til at navigere ved hjælp af et forud specificeret kort eller konstruere et kort i farten. Inden for robotteknologi, dette er kendt som SLAM - samtidig lokalisering og kortlægning . Kortlægning beskriver, hvordan en robot konverterer oplysninger indsamlet med sine sensorer til en given repræsentation. Lokalisering beskriver, hvordan en robot placerer sig i forhold til kortet. I praksis, disse to processer skal forekomme samtidigt, skabe et kylling-og-æg-gåde, som forskere har været i stand til at overvinde med mere kraftfulde computere og avancerede algoritmer, der beregner position baseret på sandsynligheder.
9:Vis fingerfærdighed
 Twendy-One, en robot med det formål at hjælpe ældre og handicappede rundt i huset, demonstrerer sin evne til at holde sarte genstande ved at manipulere et sugerør mellem fingrene på Waseda University i Tokyo den 8. januar, 2009. © Issei Kato/Reuters/Corbis
Twendy-One, en robot med det formål at hjælpe ældre og handicappede rundt i huset, demonstrerer sin evne til at holde sarte genstande ved at manipulere et sugerør mellem fingrene på Waseda University i Tokyo den 8. januar, 2009. © Issei Kato/Reuters/Corbis Robotter har hentet pakker og dele på fabrikker og lagre i årevis. Men de undgår generelt mennesker i disse situationer, og de arbejder næsten altid med konsekvent formede objekter i rodfrie miljøer. Livet er langt mindre struktureret for enhver robot, der begiver sig ud over fabriksgulvet. Hvis en sådan maskine nogensinde håber at arbejde i hjem eller på hospitaler, det har brug for en avanceret berøringssans, der er i stand til at opdage nærliggende mennesker og kirsebærplukke et element fra en uordentlig samling af ting.
Det er vanskelige færdigheder for en robot at lære. Traditionelt set forskere undgik berøring helt, programmering af deres maskiner til at mislykkes, hvis de fik kontakt med et andet objekt. Men i de sidste fem år eller deromkring, der har været betydelige fremskridt inden for kompatible designs og kunstig hud. Overholdelse refererer til en robots fleksibilitet. Meget fleksible maskiner er mere kompatible; stive maskiner er mindre.
I 2013, Georgia Tech -forskere byggede en robotarm med fjedre til led, som gør det muligt for vedhænget at bøje og interagere med sit miljø mere som en menneskelig arm. Næste, de dækkede det hele i "hud", der var i stand til at fornemme tryk eller berøring. Nogle robotskind indeholder sammenlåsende sekskantede kredsløb, hver bærer infrarøde sensorer, der kan registrere alt, der kommer tættere på end en centimeter. Andre er udstyret med elektroniske "fingeraftryk" - hævede og riflede overflader, der forbedrer grebet og letter signalbehandling.
Kombiner disse højteknologiske arme med forbedrede synssystemer, og du får en robot, der kan tilbyde et ømt kærtegn eller nå ind i skabe for at vælge et element fra en større samling.
8:Hold en samtale
 Mekatronikingeniør Ben Schaefer interagerer med humanoid robot bartender Carl, da den tilbereder en drink i Robots Bar and Lounge i Tyskland den 26. juli, 2013. Udviklet af Schaefer, Carl kan også interagere med kunder i små samtaler. © Fabrizio Bensch/Reuters/Corbis
Mekatronikingeniør Ben Schaefer interagerer med humanoid robot bartender Carl, da den tilbereder en drink i Robots Bar and Lounge i Tyskland den 26. juli, 2013. Udviklet af Schaefer, Carl kan også interagere med kunder i små samtaler. © Fabrizio Bensch/Reuters/Corbis Alan M. Turing, en af grundlæggerne af datalogi, lavede en dristig forudsigelse i 1950:Maskiner ville en dag kunne tale så flydende, at vi ikke ville være i stand til at skelne dem fra mennesker. Ak, robotter (selv Siri) har ikke levet op til Turings forventninger - endnu. Det er fordi talegenkendelse er meget anderledes end naturlig sprogbehandling - hvad vores hjerner gør for at udtrække mening fra ord og sætninger under en samtale.
I første omgang, forskere troede, at det ville være så enkelt som at tilslutte grammatikreglerne til en maskines hukommelsesbanker. Men hårdkodning af en grammatisk primer til et givet sprog har vist sig at være umulig. Selv at give regler om betydningen af individuelle ord har gjort sprogindlæring til en skræmmende opgave. Har du brug for et eksempel? Tænk "ny" og "vidste" eller "bank" (et sted at lægge penge) og "bank" (siden af en flod). Det viser sig, at mennesker giver mening om disse sproglige særegenheder ved at stole på mentale evner udviklet over mange, mange års udvikling, og forskere har ikke været i stand til at opdele disse muligheder i diskrete, identificerbare regler.
Som resultat, mange robotter i dag baserer deres sprogbehandling på statistik. Forskere fodrer dem med enorme samlinger af tekst, kendt som en korpus , og lad derefter deres computere nedbryde den længere tekst i bidder for at finde ud af, hvilke ord der ofte kommer sammen og i hvilken rækkefølge. Dette gør det muligt for robotten at "lære" et sprog baseret på statistisk analyse. For eksempel, til en robot, ordet "flagermus" ledsaget af ordet "flue" eller "vinge" refererer til det flyvende pattedyr, hvorimod "flagermus" efterfulgt af "bold" eller "handske" refererer til holdsporten.
7:Få nye færdigheder
 En robot viser sine skrivefærdigheder under en konkurrence om intelligente robotter skabt af universitetsstuderende ved Kinas Anhui University of Science and Technology den 16. november, 2012. © Chen Bin/Xinhua Press/Corbis
En robot viser sine skrivefærdigheder under en konkurrence om intelligente robotter skabt af universitetsstuderende ved Kinas Anhui University of Science and Technology den 16. november, 2012. © Chen Bin/Xinhua Press/Corbis Lad os sige, at nogen, der aldrig har spillet golf, vil lære at svinge en klub. Han kunne læse en bog om det og derefter prøve det, eller han kunne se en øvet golfspiller gennemgå de rigtige bevægelser, en hurtigere og lettere tilgang til at lære den nye adfærd.
Robotikere står over for et lignende dilemma, når de forsøger at bygge en autonom maskine, der er i stand til at lære nye færdigheder. En tilgang, som med golfeksemplet, er at nedbryde en aktivitet i præcise trin og derefter programmere informationen i robotens hjerne. Dette forudsætter, at alle aspekter af aktiviteten kan dissekeres, beskrevet og kodet, hvilken, det viser sig, er ikke altid let at gøre. Der er visse aspekter ved at svinge en golfklub, for eksempel, der uden tvivl ikke kan beskrives, som samspillet mellem håndled og albue. Disse subtile detaljer kan kommunikeres langt lettere ved at vise frem for at fortælle.
I de seneste år, forskere har haft en vis succes med at lære robotter at efterligne en menneskelig operatør. De kalder dette efterligning eller lære af demonstration ( LfD ), og de trækker det af ved at bevæbne deres maskiner med arrays med vidvinkel- og zoomkameraer. Dette udstyr gør det muligt for robotten at "se" en menneskelig lærer, der udfører en bestemt proces eller aktivitet. Læringsalgoritmer behandler derefter disse data for at producere et matematisk funktionskort, der forbinder visuelt input til ønskede handlinger. Selvfølgelig, robotter i LfD -scenarier skal være i stand til at ignorere visse aspekter af lærerens adfærd - såsom at klø en kløe - og håndtere korrespondanceproblemer, som refererer til måder, hvorpå en robots anatomi adskiller sig fra et menneskes.
6:Øv bedrag
Egern praktiseres i bedragskunsten, så forskere har henvendt sig til disse lune gnavere for et par ideer til at lære robotter vildledende adfærd. John Foxx/Stockbyte/Thinkstock Bedrageriets kunst har udviklet sig til at hjælpe dyr med at få et ben op på deres konkurrenter og undgå at blive spist af rovdyr. Med praksis, færdigheden kan blive en yderst effektiv overlevelsesmekanisme.
For robotter, at lære at bedrage en person eller en anden robot har været udfordrende (og det kan være fint med dig). Bedrag kræver fantasi - evnen til at danne ideer eller billeder af eksterne objekter, der ikke er til stede for sanserne - hvilket er noget, maskiner typisk mangler (se det næste punkt på vores liste). De er gode til at behandle direkte input fra sensorer, kameraer og scannere, men ikke så stor til at danne begreber, der eksisterer ud over alle disse sansedata.
Fremtidige robotter kan dog godt kende til snyd. Georgia Tech -forskere har været i stand til at overføre nogle vildledende færdigheder hos egern til robotter i deres laboratorium. Først, de studerede de fuzzy gnavere, som beskytter deres gemmer af begravet mad ved at føre konkurrenter til gamle, ubrugte cacher. Derefter kodede de denne adfærd til enkle regler og indlæste dem i hjernen på deres robotter. Maskinerne kunne bruge algoritmerne til at afgøre, om bedrag kunne være nyttigt i en given situation. Hvis så, de var derefter i stand til at levere en falsk kommunikation, der førte en ledsager bot væk fra deres skjulested.
5:Forvent menneskelige handlinger
 Hvis mennesker kommer til at bruge meget tid med robotter, ligesom denne humanoide, kaldet ROBOY, maskinerne bliver nødt til at blive lidt bedre til at forudsige, hvad tilsyneladende uforudsigelige mennesker vil gøre næste gang. © Erik Tham/Corbis
Hvis mennesker kommer til at bruge meget tid med robotter, ligesom denne humanoide, kaldet ROBOY, maskinerne bliver nødt til at blive lidt bedre til at forudsige, hvad tilsyneladende uforudsigelige mennesker vil gøre næste gang. © Erik Tham/Corbis På "Jetsons, "Robotpigen Rosie var i stand til at føre samtaler, lave mad, rengøre huset og imødekomme George's behov og ønsker, Jane, Judy og Elroy. For at forstå Rosies avancerede udvikling, overvej denne scene fra det første afsnit af sæson et:Mr. Spacely, Georges chef, kommer til Jetson -huset til middag. Efter maden, Mr. Spacely tager en cigar og lægger den i munden, hvilket får Rosie til at skynde sig over med en lighter. Denne enkle handling repræsenterer en kompleks menneskelig adfærd - evnen til at forudse, hvad der kommer derefter baseret på det, der lige er sket.
Ligesom bedrag, foregribelse af menneskelig handling kræver, at en robot forestiller sig en fremtidig tilstand. Det skal kunne sige, "Hvis jeg ser et menneske gøre x, så kan jeg forvente, baseret på tidligere erfaring, at hun sandsynligvis vil følge det op med y. "Dette har været en alvorlig udfordring inden for robotik, men mennesker gør fremskridt. På Cornell University, et team har arbejdet på at udvikle en autonom robot, der kan reagere baseret på, hvordan en ledsager interagerer med objekter i miljøet. For at opnå dette, robotten bruger et par 3D-kameraer til at få et billede af omgivelserne. Næste, en algoritme identificerer nøgleobjekterne i rummet og isolerer dem fra baggrundsrod. Derefter, ved hjælp af et væld af oplysninger indsamlet fra tidligere træningssessioner, robotten genererer et sæt sandsynlige forventninger baseret på personens bevægelse og de genstande, hun rører ved. Robotten gætter bedst på, hvad der derefter vil ske og handler derefter.
Cornell -robotterne gætter stadig forkert nogle gange, men de gør stadige fremskridt, især som kamerateknologi forbedres.
4:Koordinere aktiviteter med en anden robot
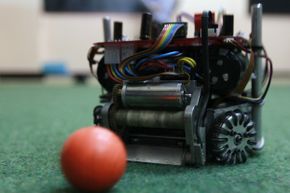 Nærbillede af et medlem af Colombias robotfodboldhold. En af RoboCup fodboldligaerne har flere fuldt autonome robotter, der arbejder sammen om at spille sporten. En anden liga indeholder humanoide robotter! © John Vizcaino/Reuters/Corbis
Nærbillede af et medlem af Colombias robotfodboldhold. En af RoboCup fodboldligaerne har flere fuldt autonome robotter, der arbejder sammen om at spille sporten. En anden liga indeholder humanoide robotter! © John Vizcaino/Reuters/Corbis Bygger en enkelt, stor maskine-en android, hvis du vil - kræver betydelige investeringer i tid, energi og penge. En anden tilgang indebærer indsættelse af en hær af mindre, enklere robotter, der derefter arbejder sammen om at udføre mere komplekse opgaver.
Dette bringer et andet sæt udfordringer. En robot, der arbejder i et team, skal være i stand til at positionere sig præcist i forhold til holdkammerater og skal være i stand til at kommunikere effektivt - med andre maskiner og med menneskelige operatører. For at løse disse problemer, forskere har vendt sig til insekternes verden, som udviser kompleks sværmeadfærd for at finde mad og fuldføre opgaver, der gavner hele kolonien. For eksempel, ved at studere myrer, forskere ved, at individer bruger feromoner til at kommunikere med hinanden.
Robotter kan bruge den samme "feromonlogik, "selvom de er afhængige af lys, ikke kemikalier, at kommunikere. Det fungerer sådan:En gruppe små bots er spredt i et begrænset område. I starten de udforsker området tilfældigt, indtil en person støder på et spor af lys efterladt af en anden bot. Det ved at følge sporet og gør det, efterlader sit eget lysspor som det går. Efterhånden som stien bliver forstærket, flere og flere bots finder det og slutter sig til vogntoget. Nogle forskere har også fundet succes ved hjælp af hørbare kvidren. Lyd kan bruges til at sikre, at individuelle bots ikke vandrer for langt væk eller for at tiltrække holdkammerater til et interessepunkt.
3:Lav kopier af sig selv
 En hydra viser sin selvreplikerende evne, en, som nogle robotocister ikke ville have noget imod at indarbejde i deres maskiner. luismmolina/iStock/Thinkstock
En hydra viser sin selvreplikerende evne, en, som nogle robotocister ikke ville have noget imod at indarbejde i deres maskiner. luismmolina/iStock/Thinkstock Gud fortalte Adam og Eva, "Vær frugtbar og multiplicér, og genopbygge jorden. "En robot, der modtog den samme kommando, ville føle sig enten flummoxed eller frustreret. Hvorfor? Fordi selvreplikation har vist sig undvigende. Det er en ting at bygge en robot-det er en helt anden ting at bygge en robot, der kan lave kopier af sig selv eller regenerer tabte eller beskadigede komponenter.
Interessant nok, robotter ser muligvis ikke på mennesker som reproduktive forbilleder. Måske har du bemærket, at vi faktisk ikke deler op i to identiske stykker. Enkle dyr, imidlertid, gør dette hele tiden. Slægtninge til vandmænd kendt som hydra praktiserer en form for aseksuel reproduktion kendt som spirende :En lille sækballoner udad fra forældrenes krop og bryder derefter af for at blive en ny, genetisk identisk person.
Forskere arbejder på robotter, der kan udføre denne grundlæggende kloningsprocedure. Mange af disse robotter er bygget af gentagne elementer, normalt terninger, der indeholder identiske maskiner og programmet til selvreplikation. Terningerne har magneter på deres overflader, så de kan fastgøres til og løsnes fra andre terninger i nærheden. Og hver terning er delt i to stykker langs en diagonal, så hver halvdel kan drejes uafhængigt. En komplet robot, derefter, består af flere terninger arrangeret i en bestemt konfiguration. Så længe der er tilførsel af terninger, en enkelt robot kan bøje sig, fjern terninger fra dens "krop" for at så en ny maskine og saml derefter byggesten fra lageret, indtil to fuldt dannede robotter står side om side.
2:Lov baseret på etisk princip
 Hvis du bygger dødelige autonome robotter, der ikke kræver menneskelige operatører, hvordan vil du egentlig programmere etik? © Fang Zhe/Xinhua Press/Corbis
Hvis du bygger dødelige autonome robotter, der ikke kræver menneskelige operatører, hvordan vil du egentlig programmere etik? © Fang Zhe/Xinhua Press/Corbis Når vi interagerer med mennesker hele dagen, vi tager hundredvis af beslutninger. I hver enkelt, vi vejer vores valg op imod hvad der er rigtigt og forkert, hvad der er fair og uretfærdigt. Hvis vi vil have robotter til at opføre sig som os, de har brug for en forståelse af etik.
Ligesom sprog, kodning af etisk adfærd er en enorm udfordring, hovedsagelig fordi et generelt sæt af universelt accepterede etiske principper ikke findes. Forskellige kulturer har forskellige adfærdsregler og varierende love. Selv inden for kulturer, regionale forskelle kan påvirke, hvordan mennesker vurderer og måler deres handlinger og handlinger fra dem omkring dem. At prøve at skrive en globalt relevant etik manuel robotter kunne bruge som et læringsværktøj ville være næsten umuligt.
Med det sagt, forskere har for nylig været i stand til at bygge etiske robotter ved at begrænse omfanget af problemet. For eksempel, en maskine begrænset til et specifikt miljø - et køkken, sige, eller en patients værelse i et plejebolig - ville have langt færre regler at lære og ville have rimelig succes med at tage etisk forsvarlige beslutninger. For at opnå dette, robotingeniører indtaster oplysninger om valg, der betragtes som etiske i udvalgte tilfælde, i en maskinlæringsalgoritme. Valgene er baseret på tre kriterier i skridskala:hvor meget godt en handling ville resultere i, hvor meget skade det ville forhindre og et mål for retfærdighed. Algoritmen udsender derefter et etisk princip, der kan bruges af robotten, når den træffer beslutninger. Ved hjælp af denne type kunstig intelligens, din fremtidige husholdningsrobot vil være i stand til at bestemme, hvem i familien, der skal vaske op, og hvem der skal styre tv -fjernbetjeningen for natten.
1:Føl følelser
Sammen med sine følelsesmæssige evner, Nao ved klart, hvordan man skal slappe af. © Gerd Roth/dpa/Corbis "De bedste og smukkeste ting i verden kan ikke ses eller røres. De skal mærkes med hjertet." Hvis denne observation af Helen Keller er sand, så ville robotter være bestemt til at gå glip af det bedste og smukkeste. Trods alt, de er gode til at fornemme verden omkring dem, men de kan ikke forvandle disse sensoriske data til bestemte følelser. De kan ikke se en elsket ens smil og føle glæde, eller optag en skyggefuld fremmeds grimasse og skælver af frygt.
Det her, mere end noget på vores liste, kunne være den ting, der adskiller mennesket fra maskinen. Hvordan kan du lære en robot at blive forelsket? Hvordan kan du programmere frustration, afsky, undren eller medlidenhed? Er det overhovedet værd at prøve?
Nogle forskere mener det. De tror, at fremtidige robotter vil integrere både kognitive følelsessystemer, og det, som resultat, de vil kunne fungere bedre, lære hurtigere og interagere mere effektivt med mennesker. Tro det eller ej, Der findes allerede prototyper, der udtrykker en begrænset række menneskelige følelser. Nao, en robot udviklet af et europæisk forskerhold, har affektive kvaliteter som et 1-årigt barn. Det kan vise lykke, vrede, frygt og stolthed, alt ved at kombinere stillinger med bevægelser. Disse visningshandlinger, stammer fra undersøgelser af chimpanser og spædbørn fra mennesker er programmeret til Nao, men robotten bestemmer, hvilken følelse der skal vises på baggrund af dets interaktion med mennesker og objekter i nærheden. I de kommende år, robotter som Nao vil sandsynligvis fungere i forskellige indstillinger - hospitaler, hjem og skoler - hvor de vil være i stand til at give en hjælpende hånd og et sympatisk øre.
Masser mere information
Forfatterens note:10 sværeste ting at lære robotter
Robotten fra "Lost in Space" (tv -serien fra 1960'erne, ikke den frygtelige film fra 1998) vandrede rundt i min fantasi, da jeg skrev denne artikel. Det var svært at skrive om mennesker, der interagerer med maskiner og ikke høre Robotens ikoniske advarsel - "Fare, Vil Robinson, fare! " - ekko i mine tanker.
relaterede artikler
- 10 onde robotter bøjet til at ødelægge menneskeheden
- 10 robotter med beskidte job
- Hvad gør realistiske robotter så uhyggelige?
- Hvordan leder en robot en symfoni?
- Hvad er en nano quadrotor?
Kilder
- Ackerman, Evan. "Cornell lærer robotter at bruge deres fantasi, når de organiserer dine ting." IEEE -spektrum. 21. juni kl. 2012. (4. nov. 2013) http://spectrum.ieee.org/automaton/robotics/artificial-intelligence/cornell-teaching-robots-to-use-their-imaginations-when-organizing-your-stuff
- Ackerman, Evan. "Georgia Tech Robots Lær vildledende adfærd fra egern." IEEE -spektrum. 3. december, 2012. (4. nov. 2013) http://spectrum.ieee.org/automaton/robotics/artificial-intelligence/robots-learn-deceptive-behaviors-from-squirrels
- Ackerman, Evan. "Hvorfor lære en robot at hente en kop kaffemateriale." IEEE -spektrum. 9. maj kl. 2013. (4. nov. 2013) http://spectrum.ieee.org/automaton/robotics/robotics-software/pr2-robot-fetches-cup-of-coffee
- Anderson, Michael og Susan Leigh Anderson. "Robot, Vær god. "Scientific American. Oktober 2010.
- Batalin, Maxim A., Gaurav S. Sukhatme og Myron Hattig. "Mobil robotnavigation ved hjælp af et sensornetværk." IEEE International Conference on Robotics and Automation. 26. april kl. 2004. (4. november, 2013) http://robotics.usc.edu/publications/media/uploads/pubs/367.pdf
- Bonabeau, Eric og Guy Théraulaz. "Swarm Smarts." Scientific American Reports. Specialudgave om robotik. 2008.
- Breazeal, Cynthia og Rodney Brooks. "Robotemotion:Et funktionelt perspektiv." Personal Robotics Group. 2005. (4. nov. 2013) http://robotic.media.mit.edu/pdfs/other/Breazeal-Brooks-03.pdf
- Carroll, Chris. "Undervisning i robotter i at foregribe menneskelige handlinger." National Geographic News. 31. maj kl. 2013. (4. nov. 2013) http://news.nationalgeographic.com/news/2013/05/130531-personal-robot-beer-microsoft-kinect-saxena-science/
- Dillow, Ler. "Forbedring af roboters berøringssans ved at give dem menneskelignende fingeraftryk." Populær videnskab. 21. september kl. 2011. (4. nov. 2013) http://www.popsci.com/technology/article/2011-09/enhancing-robots-senses-touch-giving-them-human-fingerprints
- Durrant-Whyte, Hugh og Tim Bailey. "Samtidig lokalisering og kortlægning (SLAM):Del I De vigtige algoritmer." Robotics and Automation Magazine. 2006. (4. nov. 2013) http://www-personal.acfr.usyd.edu.au/tbailey/papers/slamtute1.pdf
- Englert, Peter, Alexandros Paraschos, Jan Peters og Marc Peter Deisenroth. "Modelbaseret imitationslæring ved hjælp af proabilistisk bane-matchning." Proceedings of the IEEE International Conference on Robotics and Automation. 2013. (4. nov. 2013) http://www.is.tuebingen.mpg.de/fileadmin/user_upload/files/publications/2013/Englert_ICRA_2013.pdf
- Griffin, Catherine. "MIT-forskere opretter M-Cube selvmonterende robotter:Real World Transformers." Science World Report. 4. oktober kl. 2013. (4. nov. 2013) http://www.scienceworldreport.com/articles/9948/20131004/mit-scientists-create-m-cube-self-assembling-robots-real-world.htm
- Halverson, Nic. "Elektronisk hud giver robotter en følelse af berøring." Discovery News. 1. juli kl. 2011. (4. nov. 2013) http://news.discovery.com/tech/robotics/electronic-skin-gives-robots-sense-touch-110701.htm
- Håndværk, Brian. "Robotrevolution? Forskere lærer robotter at lære." National Geographic News. 18. juli kl. 2013. (4. nov. 2013) http://news.nationalgeographic.com/news/2013/07/130719-robot-lfd-pr2-artificial-intelligence-crowdsourcing-robotics-machine-learning/
- Hårdhed, Larry. "Undervisning i robotter i lateral tænkning." MIT Nyheder. 25. februar kl. 2013. (4. nov. 2013) http://web.mit.edu/newsoffice/2013/teaching-robots-lateral-thinking-0225.html
- Hartshorne, Joshua K. "Hvor er de talende robotter?" Videnskabeligt amerikansk sind. Marts/april 2011.
- Hicks, Jennifer. "At lære robotter at bedrage." Forbes. 30. december kl. 2012. (4. nov. 2013) http://www.forbes.com/sites/jenniferhicks/2012/12/30/teaching-robots-to-deceive/
- Jha, Alok. "Den første robot, der er i stand til at udvikle og vise følelser, bliver afsløret." Værgen. 8. august, 2010. (4. nov. 2013) http://www.theguardian.com/technology/2010/aug/09/nao-robot-develop-display-emotions
- Jones, Joshua, forsker, Georgia Institute of Technology. E-mail korrespondance. 11. november kl. 2013. http://www.cc.gatech.edu/~jj187/
- Korn, Jon. "A 'Bot Bestiary:The Robotic Tradition In Science Fiction." LitReactor. 13. juli kl. 2012. (4. nov. 2013) http://litreactor.com/columns/a-bot-bestiary-the-robotic-tradition-in-science-fiction
- Markoff, John. "Forskere sætter følelse af berøring inden for robotter." New York Times. 28. april kl. 2013. (4. nov. 2013) http://www.nytimes.com/2013/04/28/science/researchers-put-sense-of-touch-in-reach-for-robots.html?_r=0
- OpenSLAM.org. "Hvad er SLAM?" (4. november kl. 2013) http://www.openslam.org/
- Ratlif, Nathan D., J. Andrew Bagnell og Siddhartha Srinivasa. "Imiteret læring til bevægelse og manipulation." Robotics Institute, Carnegie Mellon University. December 2007. (4. nov. 2013) http://www.ri.cmu.edu/pub_files/pub4/ratliff_nathan_2007_4/ratliff_nathan_2007_4.pdf
- Rieland, Randy. "Robotter får den menneskelige berøring." Smithsonian Magazine. 10. november kl. 2011. (4. nov. 2013) http://blogs.smithsonianmag.com/ideas/2011/11/robots-get-the-human-touch/
- Schultz, Colin. "Denne nye robot har en følelse af berøring." Smithsonian Magazine. 29. april kl. 2013. (4. nov. 2013) http://blogs.smithsonianmag.com/smartnews/2013/04/this-new-robot-has-a-sense-of-touch/
- Sipper, Moshe og James A. Reggia. "Gå videre og repliker." Scientific American Reports. Specialudgave om robotik. 2008.
- Steele, Regning. "Forskere bygger en robot, der kan reproducere." Cornell Chronicle. 25. maj kl. 2005. (4. nov. 2013) http://www.news.cornell.edu/stories/2005/05/researchers-build-robot-can-reproduce
- Summet, Jay. E-mail korrespondance. 22. november kl. 2013. http://www.summet.com/
- Tofel, Kevin C. "MIT:Vi er et skridt tættere på selvreplikerende objekter." Gigaom. 3. april kl. 2012. (4. nov. 2013) http://gigaom.com/2012/04/03/mit-were-one-step-closer-to-self-replicating-objects/
- Wadsworth, Derek. "Adaptiv robotik." Idaho National Laboratory. (4. november kl. 2013) https://inlportal.inl.gov/portal/server.pt/community/robotics_and_intelligence_systems/455
Sidste artikel10 Underlige konstruktionstekniske vidundere
Næste artikel10 Green Structural Engineering Marvels
 Varme artikler
Varme artikler
-
 Apples Seneste sundhedsskifte er en app, der indsamler data til 3 nye undersøgelserHar du en iPhone og et virkelig stærkt ønske om at deltage i en sundhedsundersøgelse? Nå, så gå videre til App Store og download Apples nye forskningsapp. Det er virksomhedens seneste skridt ind
Apples Seneste sundhedsskifte er en app, der indsamler data til 3 nye undersøgelserHar du en iPhone og et virkelig stærkt ønske om at deltage i en sundhedsundersøgelse? Nå, så gå videre til App Store og download Apples nye forskningsapp. Det er virksomhedens seneste skridt ind -
 Hvad gør dyr, når de bliver syge?Nogensinde begyndte at hacke en lunge eller er blevet lagt på sofaen med feber, og spekulerede på, om din hund nogle gange føler det samme? Nå, din hvalp føles måske ikke nøjagtigt på samme måde. M
Hvad gør dyr, når de bliver syge?Nogensinde begyndte at hacke en lunge eller er blevet lagt på sofaen med feber, og spekulerede på, om din hund nogle gange føler det samme? Nå, din hvalp føles måske ikke nøjagtigt på samme måde. M -
 I weekender er Blood Moon den sidste indtil 2021 - Så tjek det!Vi ved allerede, at søndag aften er sandsynligvis når du indhenter hjemmearbejde - eller, uden dom, får timer dybt ned i en Netflix-binge. Men kan vi foreslå at tage en pause fra studiet (eller s
I weekender er Blood Moon den sidste indtil 2021 - Så tjek det!Vi ved allerede, at søndag aften er sandsynligvis når du indhenter hjemmearbejde - eller, uden dom, får timer dybt ned i en Netflix-binge. Men kan vi foreslå at tage en pause fra studiet (eller s -
 Sådan forstås nummersætEt sæt er en gruppe af objekter. I matematik hjælper sæt sætgruppenumre, der måske eller måske ikke har fælles egenskaber. At lære om nogle af de standardnummersæt med delte egenskaber vil hjælpe dig
Sådan forstås nummersætEt sæt er en gruppe af objekter. I matematik hjælper sæt sætgruppenumre, der måske eller måske ikke har fælles egenskaber. At lære om nogle af de standardnummersæt med delte egenskaber vil hjælpe dig