


Sådan fungerer rigtige transformere
 Optimus Prime i tobenet form, fra filmen "The Transformers". Se mere billeder af robotter . Billede © 2007 Dreamworks Pictures
Optimus Prime i tobenet form, fra filmen "The Transformers". Se mere billeder af robotter . Billede © 2007 Dreamworks Pictures Uden tvivl, HowStuffWorks -personalet er bekymrede for den kommende "Transformers" -film. Vi spekulerer ikke bare på, om det bliver godt. Vi spekulerer på, om vi vil se robotter med transformers muligheder i løbet af vores levetid. Selvom Transformere i fuld skala virker lidt usandsynlige - og upraktiske - viser det sig, at nogle eksisterende robotter har meget tilfælles med Transformers. I denne artikel, vi vil undersøge, hvordan disse transformerende robotter ser ud, hvordan de fungerer, og hvordan de ligner Transformers som Optimus Prime.
Vi begynder med en analyse af Prime selv. Han er enorm og imponerende, men kunne han nogensinde være ægte? At finde ud af, vi spurgte ingeniør Michael D. Belote, hvad det ville kræve for at bygge en fuldskala traktor-trailer, der kan konvertere til en tobenet robot. Med andre ord, hvad skal der til for at lave en version i fuld størrelse af Optimus Prime?
Først, Prime skal være en selvkonfigurerende robot . Nogle selvkonfigurerende robotter, eller robotter, der kan ændre deres former for at udføre forskellige opgaver, eksisterer i dag. Imidlertid, de er meget forskellige fra Optimus Prime. Som Belote forklarer:
Med selvkonfigurerbare robotter, ingeniøren foretrækker typisk at beholde den enkelte, mobile moduler små, enkel, billig, og udskiftelig; i tilfælde af Optimus Prime, imidlertid, vi har at gøre med en robot, hvis individuelle moduler er lige så store som førerhuset på en semi -lastbil. Selv hvis det var muligt at bygge sådanne moduler, udgiften ville være ublu, og den ekstraordinære kompleksitet ville gøre det næsten umuligt nogensinde at få alle systemerne til at fungere korrekt sammen.Hvis ingeniører fandt ud af, hvordan man laver udskiftelige moduler på Optimus Prime's skala, det kan stadig være umuligt at give magt til at flytte dem. I hans køretøjsform, Optimus Prime kan køre på almindeligt dieselbrændstof. Men at gå er langt mindre effektivt end at rulle på hjul. For at gå, Prime ville have brug for langt mere strøm, end en dieselmotor kunne levere. Her er Belotes analyse af, hvordan man håndterer Prime's strømkrav:
Traditionelle robotter er bygget på en af tre strømkilder-elektriske, pneumatisk, eller hydraulisk. På grund af de involverede ekstreme vægte, hydraulisk kraft er den mest sandsynlige kilde til Prime, fordi hydrauliske aktuatorer leverer meget høje effekt-til-vægt-forhold (stor effekt for små effektindgange).Så hydraulisk kraft kan tillade Prime at gå, men selve hydrauliksystemet ville skabe et andet sæt problemer. "Der skal tilføjes en tank eller et reservoir for at holde hydraulikvæsken, "siger Belote, "hydrauliske pumper er nødvendige; en sekundær strømkilde skal bruges til at drive pumpen; ventiler er nødvendige for at opfylde de passende tryk og strømningshastigheder." Ud over, en hydraulisk drevet Prime skulle beklædes med rør for at transportere hydraulikvæsken. Disse rør, sammen med Prime's brændstofledninger og elektriske ledninger, skulle forblive ubeskadiget eller endda uberørt under transformation.
Efter at have overlevet transformationen til robotform, Prime skulle derefter gå som en tobenet. Belote beskriver, hvad der skal til for at dette kan ske:Da traditionelle semier ofte overstiger 30 tons i vægt, den endelige vægt af Prime kunne let ligge i området 35 til 40 ton. Sammenlign dette med verdens bedste "walking" robot, Hondas ASIMO -robot, som har en totalvægt på 119 pund og alligevel kun kan gå i cirka 40 minutter (elektrisk drevet) og med en maksimal hastighed på mindre end 2 mph. Vægtforholdet for ASIMO er 2,3 lbs per tomme, sammenlignet med vægtforholdet mellem Prime, som sandsynligvis ville overstige 75 til 80 lbs pr. tomme-en tredobbelts stigning.
Ud over, robotter kan ikke let efterligne bevægelsen ved at gå. "Med en robot, "Belote forklarer, "der er en direkte kommando (løft benets 'x' beløb, læne 'y' beløb fremad, forlæng benet 'z' beløb nedad, og så videre). Med mennesker, imidlertid, der er ingen 'feedback' -mekanisme - din hjerne kommunikerer ikke konstant til dine ben om, hvor de skal placeres. I stedet, du læner dig bare frem og falder, 'sætter dit ben til at absorbere stødet, når din fod kommer i kontakt med gulvet. "
Så det er ikke sandsynligt, at vi kunne se en fungerende Optimus Prime eller en robot som ham i vores levetid. Men robotter, der kan ændre deres form eller blive til en hvilken som helst form, eksisterer allerede. Vi vil se på nogle af dem - og hvordan de sammenligner med Prime - i det næste afsnit.
Indhold
- Selvkonfigurerende robotter
- Gitterrobotter
- En sværm af parallelle hjerner
Selvkonfigurerende robotter
 Optimus Prime kan både være en tobenet robot og en semivogn. Billede © 2007 Dreamworks Pictures
Optimus Prime kan både være en tobenet robot og en semivogn. Billede © 2007 Dreamworks Pictures Det fedeste ved Transformers, selvfølgelig, er, at de kan tage to helt forskellige former. De fleste kan være tobenede robotter eller arbejdende køretøjer. Nogle kan i stedet omdanne til våben eller elektroniske enheder. En transformers to former har vidt forskellige styrker og muligheder.
Dette er helt anderledes end de fleste rigtige robotter, som normalt kun er gode til at udføre en opgave eller et par relaterede opgaver. Mars Exploration Rovers, for eksempel, kan gøre følgende:
- Generer strøm med solceller og gem den i batterier
- Kør hen over landskabet
- Tag billeder
- Bor i sten
- Brug spektrometre til at registrere temperaturer, kemiske sammensætninger, røntgenstråler og alfapartikler
- Send de registrerede data tilbage til Jorden ved hjælp af radiobølger
 En kunstners gengivelse af en Mars Exploration Rover på overfladen af Mars Billede med tilladelse fra NASA
En kunstners gengivelse af en Mars Exploration Rover på overfladen af Mars Billede med tilladelse fra NASA En Exploration Rover ville ikke være særlig god til opgaver, der ikke passer ind i disse kategorier. Det kan ikke, for eksempel, saml en bro, passe ind i meget små rum eller bygge andre robotter. Med andre ord, det ville lave en elendig søge-og-rednings robot, og det ville slet ikke passe ind i en automatiseret fabrik.
 NASAs Snakebot er et eksempel på en kæderobot. Billede med tilladelse fra NASA
NASAs Snakebot er et eksempel på en kæderobot. Billede med tilladelse fra NASA 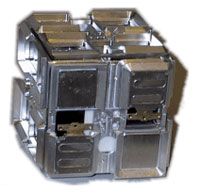 Et Telecube G2 -modul Billede høflighed Palo Alto Research Center Incorporated
Et Telecube G2 -modul Billede høflighed Palo Alto Research Center Incorporated Derfor udvikler ingeniører omkonfigurering af robotter . Ligesom Transformers, disse robotter kan ændre deres form, så de passer til opgaven. Men i stedet for at skifte fra en form til en anden form, som en tobenet robot til en traktor-trailer, rekonfiguration af robotter kan have mange former. De er meget mindre end rigtige Transformers ville være; en eller anden omkonfigurerende robot moduler er små nok til at passe i en persons hånd.
Et modul er i det væsentlige et lille, relativt simpel robot eller stykke af en robot. Modulære robotter er lavet af masser af disse små, identiske moduler. En modulær robot kan bestå af et par moduler eller mange, afhængigt af robotens design og den opgave, den skal udføre. Nogle modulære robotter findes i øjeblikket kun som computersimuleringer; andre er stadig i de tidlige stadier af udviklingen. Men de fungerer alle efter det samme grundlæggende princip - masser af små robotter kan kombineres til at skabe en stor.
Moduler kan ikke gøre meget alene. Et rekonfigurationssystem skal også have:
- Forbindelser mellem modulerne
- Systemer, der styrer, hvordan modulerne bevæger sig i forhold til hinanden
Mest modulopbygget, rekonfiguration af robotter passer ind i en af tre kategorier:kæde, gitter og modulopbygning. Kæderobotter er lange kæder, der kan forbinde hinanden på bestemte punkter. Afhængigt af antallet af kæder og hvor de forbinder, disse robotter kan ligne slanger eller edderkopper. De kan også blive rullende sløjfer eller tobenede, gående robotter. Et sæt modulære kæder kunne navigere en forhindringsbane ved at kravle gennem en tunnel som en slange, krydser stenet terræn som en edderkop og kører på en trehjulet cykel over en bro som toben.
Eksempler på kæderobotter er Palo Alto Research Center's (PARC) Polybot og Polypod og NASAs Snakebot. De fleste har brug for et menneske eller i teorien, en anden robot, for manuelt at fastgøre forbindelserne med skruer.
Simulerede robotter
Computersimuleringer er en vigtig del af robotteknologi, især med rekonfiguration af robotter. Forskere bruger computere til at finde ud af, hvordan moduler vil bevæge sig i forhold til hinanden, før de lærer modulerne, hvordan de gør det. I nogle tilfælde, computersimuleringer eksisterer længe før egentlige robotter. Massachusetts Institute of Technology (MIT) Rus Robotics Laboratory har mange simuleringer af, hvordan disse robotter bevæger sig rundt.
Gitterrobotter
 Rus Robotics Laboratory's molekylmoduler har to terninger forbundet i en 90 graders vinkel. En overflade på hver terning huser bindingen, der forbinder den med den anden halvdel af modulet. De andre fem overflader kan fastgøres til andre moduler. Billede høflighed Keith Kotay/Rus Robotics Laboratory
Rus Robotics Laboratory's molekylmoduler har to terninger forbundet i en 90 graders vinkel. En overflade på hver terning huser bindingen, der forbinder den med den anden halvdel af modulet. De andre fem overflader kan fastgøres til andre moduler. Billede høflighed Keith Kotay/Rus Robotics Laboratory Grundtanken om et gitterrobot er det sværme af små, identiske moduler, der kan kombineres til en større robot. Flere prototype gitterrobotter eksisterer allerede, men nogle modeller findes kun som computersimuleringer. Gitterrobotter bevæger sig ved at kravle hen over hinanden, fastgørelse til og afmontering fra tilslutningspunkter på tilstødende robotter. Det er ligesom måden fliserne bevæger sig i et glidende flisepuslespil. Denne bevægelsesmetode kaldes rekonfiguration af substrat - robotterne kan kun bevæge sig langs punkter inden for gitteret af robotter. Gittermoduler kan enten have selvstændige strømkilder, eller de kan dele strømkilder gennem deres forbindelser til andre moduler.
Gitterrobotter kan bevæge sig over vanskeligt terræn ved at klatre over hinanden, efter terrænets form, eller de kan danne et fast stof, stabil overflade til at understøtte andre strukturer. Nok gitterrobotter kan skabe næsten enhver form. Computersimuleringer viser dem skifte fra en bunke dele til en tekop og fra en hund til en sofa. Modulerne kan kombineres til at lave flade overflader, stiger, bevægelige vedhæng og stort set enhver anden tænkelig form. Så en gitterrobot ligner mere en Terminator T-1000 end en transformer.
Robotiklaboratorier har skabt og teoretiseret flere gitterrobotsystemer:
- PARC'er Telecube og Massachusetts Institute of Technology (MIT) Rus Robotics Laboratory's Crystal bruger molekyler, der udvider, kontrakt og fæstne sig til andre molekyler.
- PARC'er Proteo er en teoretisk gitterrobot, der kun findes som computersimuleringer. Proteo er en samling af rhombiske dodekaeder (tolvsidede strukturer med romboformede ansigter). Dens moduler bevæger sig ved at rulle over hinandens kanter.
- Rus Robotics Laboratory Molekyl moduler er lavet af to terninger forbundet i en 90 graders vinkel. Som resultat, dens bevægelse ser lidt anderledes ud end robotter lavet af individuelle terninger. Du kan se en demonstration af, hvordan Molecule bevæger sig på Rus Robotics Laboratory -webstedet
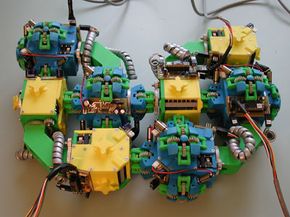
 Swarm-bots kan manøvrere uafhængigt, eller de kan kombinere for at fuldføre opgaver, de ikke kunne udføre alene. Billede høflighed professor Marco Dorigo
Swarm-bots kan manøvrere uafhængigt, eller de kan kombinere for at fuldføre opgaver, de ikke kunne udføre alene. Billede høflighed professor Marco Dorigo Ligesom gitterrobotter, mobile rekonfigurationsrobotter er små, identiske moduler, der kan kombineres til større robotter. Imidlertid, de har ikke brug for deres naboers hjælp til at komme fra sted til sted - de kan flytte rundt på egen hånd. Mobil konfiguration robotter ligner meget tegneserie skildringer af fiskeskoler eller flokke af fugle, der kombineres til at skabe et værktøj eller en struktur. De bevæger sig uafhængigt, indtil de skal komme sammen for at udføre en bestemt opgave. Swarm-bots , et projekt fra programmet Future and Emerging Technologies i EU, er mobile rekonfigurationsrobotter.
Selvom disse robotter ser meget forskellige ud fra hinanden, de har mange ligheder i, hvordan de bevæger sig og fungerer. Vi vil se på disse næste.
En virkelig rigtig transformerTransformatorer er ikke nødvendigvis praktiske eller endda mulige i stor skala. Men ingeniører hos Himeji Soft Works har udviklet en robot i lille skala, der virkelig vender sig fra en bil til en tobenet og tilbage. Du kan se en video af denne robot, herunder dens transformation, på YouTube.
En sværm af parallelle hjerner
 Transformatorer er selvbevidste og kan træffe beslutninger på egen hånd, men deres bevægelige dele er ikke autonome. Billede © 2007 Dreamworks Pictures
Transformatorer er selvbevidste og kan træffe beslutninger på egen hånd, men deres bevægelige dele er ikke autonome. Billede © 2007 Dreamworks Pictures Ud over deres størrelse og modulopbygning, selvkonfigurerende robotter adskiller sig fra Transformers på en vigtig måde. Optimus Prime og andre Transformers er selvbevidste og kan træffe uafhængige beslutninger, og de holder deres hjerner ét sted i deres kroppe. En transformers hjerne styrer hver af dens bevægelige dele, og delene selv har ringe om nogen autonomi.
I de fleste modulære robotkonfigurationer, selvom, hvert modul har en vis beslutningskraft og hjælper med at finde ud af, hvor det skal bevæge sig. I stedet for at et modul er chef for alle de andre, planlægnings- og bevægelsesmuligheder er fordelt på tværs af alle modulerne.
Denne idé - en sværm af små robotter, som hver især bestemmer, hvor det skal hen - lyder måske katastrofalt. Men modulerne er programmeret med et sæt geometri-baserede regler om, hvordan man bevæger sig. De er også programmeret med algoritmer, der styrer deres bevægelse. Disse algoritmer og regler gør det muligt for robotterne at finde ud af, hvordan de skifter fra en form til en anden og bevæger sig på tværs af terræn.
Ved meget komplekse manøvrer, robotterne planlægger i stedet en række underformer frem for at forsøge at foretage en større ændring på et trin. For eksempel, en gitterrobot, der skal skiftes fra en tilfældig bunke moduler til en tobenet robot, kan først danne benene. Derefter, det kan bruge disse ben som et stillads til at bygge den øverste halvdel af robotten.
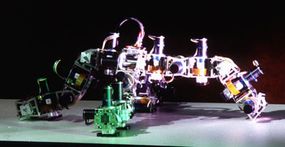 I øjeblikket, hvert modulært robotsystem har sine egne regler for, hvordan det bevæger sig og omkonfigureres. Billede høflighed Palo Alto Research Center Incorporated
I øjeblikket, hvert modulært robotsystem har sine egne regler for, hvordan det bevæger sig og omkonfigureres. Billede høflighed Palo Alto Research Center Incorporated På dette tidspunkt, mange af disse robotter kan lave simple overgange fra en form til en anden på egen hånd. Mere komplekse ændringer kan kræve hjælp fra en videnskabsmand, gør samlingen af robotter semi-autonome frem for autonome. Et par robotter, der stadig er i de tidlige udviklingsstadier, modtager al deres instruktion fra en computerarbejdsstation og træffer ingen beslutninger på egen hånd.
I øjeblikket, de fleste omkonfigurerende robotter har deres eget system med regler og algoritmer, og regelsæt fungerer kun for de robotter, som de er designet til. Med andre ord, reglerne for Rus Robotics Laboratory's Crystal fungerer ikke med Molecule.
Imidlertid, forskere bruger computersimuleringer til at undersøge bevægelsesteorier, der kunne fungere uanset hvordan et robotmodul ser ud. Disse teorier kunne fastlægge grundregler for robotbevægelse, inklusive:
- Etablering af, hvor mange trin det tager at lave en færdig struktur
- Forebyggelse af kollisioner mellem moduler
- Tillader modulerne at skabe en struktur, der er konstant stabil og ikke falder sammen, når robotterne bevæger sig
- Sørg for, at kæder eller samlinger af moduler vil kunne nå de nødvendige punkter
Hvis det lykkes, denne forskning kan gøre det lettere for ingeniører at lave nye, arbejder modulære robotter, der følger de samme bevægelsesregler.
Selvom disse robotter ikke går og taler som Transformers gør, de kan ændre sig til næsten enhver form, givet den rigtige programmering og instruktioner. For at finde ud af mere om dem og om transformatorer, se links på næste side.
Hvor opbevarer transformatorer deres hjerne?
Mens du arbejder på denne artikel, HowStuffWorks -personalet havde en livlig diskussion om, hvor Transformers beholder deres hjerner. Vi intuiterede alle det samme svar - en transformers hjerne skal være i hovedet (eller i sit cockpit i køretøjsform). Mange tegneserie- og tegneserie skildringer synes at understøtte denne idé. Imidlertid, det forklarer ikke helt, hvordan dele af Optimus Prime kan fungere separat, medmindre Prime bruger radio- eller infrarøde signaler til at sende og modtage kommandoer. Det forklarer heller ikke helt, hvorfor Constructicons 'personligheder adskiller sig fra deres komponent Transformers'. Du kan læse mere om Transformers hjerner og hvordan de fungerer på The Matrix, et uofficielt Transformers -magasin.
Masser mere information
Relaterede HowStuffWorks -artikler
- Sådan fungerer Mars Exploration Rover
- Sådan fungerer robotter
- Sådan fungerer ASIMO
Flere store links
- Rus Robotics Laboratory:Modular Robots
- Modular Robotics hos PARC
- DARPA Microrobot -projekt
Kilder
- Carnegie Mellon University. "I-terninger." http://www.cs.cmu.edu/~unsal/research/ices/cubes/
- Casal, Arancha. "Selvkonfigurationsplanlægning for en klasse modulære robotter." Xerox Palo Alto Research Center.
- DARPA Microbot Project http://www.egr.msu.edu/microrobot/
- Mayfield, Kendra. "Formen af robotter, der kommer." Kablet. 7. oktober kl. 2002. http://www.wired.com/news/ gizmos/0, 1452, 55421, 00.html? Tw =wn_story_related
- PARC. Modular Robotics:Kæde. http://www2.parc.com/spl/projects/modrobots/chain/index.html
- PARC. Modular Robotics:Gitter. http://www2.parc.com/spl/projects/modrobots/lattice/index.html
- PARC. Taksonomi for statistisk stabil bevægelse http://www2.parc.com/spl/projects/ modrobots/chain/polypod/locomotion.html
- PARC:Modular Robotics. http://www2.parc.com/spl/projects/modrobots/index.html
- Rus Robotics Laboratory. Modulære selvkonfigurerende robotter. http://groups.csail.mit.edu/drl/modular_robots/modular_robots.html
- Schenker, P.S. et al. "Omkonfigurerbare robotter til udforskning af terræn." Jet Propulsion Laboratory, California Institute of Technology.
- Shachtman, Noah. "Den supersoniske formskiftende bombefly." Populær videnskab. Juli 2006. http://www.popsci.com/popsci/aviationspace/0f2505a52aceb010vgnvcm1000004eecbccdrcrd.html
- Van der Helm, Peter A. Strukturel informationsteori og dens anvendelser. http://www.nici.kun.nl/~peterh/doc/sit.html
- Zhang, Ying, et al. "En platform til at studere bevægelsessystemer:Modulære rekonfigurerbare robotter." System- og øvelseslaboratorium, Palo Alto Research Center.
Sidste artikelEftersøgt:En velklædt Android
Næste artikelHvordan kan nogen styre en maskine med hendes tanker?
 Varme artikler
Varme artikler
-
 De bedste studietips til enhver type elevVi er på vej ind i eksamenssæsonen - og det virker bare uretfærdigt, at du sidder fast i studiet i stedet for at nyde det første sommervejr, ikke sandt? Løsningen? Studerer så effektivt som mulig
De bedste studietips til enhver type elevVi er på vej ind i eksamenssæsonen - og det virker bare uretfærdigt, at du sidder fast i studiet i stedet for at nyde det første sommervejr, ikke sandt? Løsningen? Studerer så effektivt som mulig -
 En teen-designet app kunne afslutte ensomme skolefrokosterTom Merton/Blackzheep/Getty/Sit With Us Sit With Us -appen har til formål at håndtere det akavede ved at finde et frokostbord. Forestil dig, at du igen er i mellemskolen. Skolens frokostbakke i hånde
En teen-designet app kunne afslutte ensomme skolefrokosterTom Merton/Blackzheep/Getty/Sit With Us Sit With Us -appen har til formål at håndtere det akavede ved at finde et frokostbord. Forestil dig, at du igen er i mellemskolen. Skolens frokostbakke i hånde -
 Flyvning i depressionstidslinjenRanger foretog flere bemærkelsesværdige langdistanceflyvninger, herunder en non -stop formationsflyvning fra San Francisco til Honolulu. Se flere flybilleder. Warren M. Bodie -samling 10.-11. Januar
Flyvning i depressionstidslinjenRanger foretog flere bemærkelsesværdige langdistanceflyvninger, herunder en non -stop formationsflyvning fra San Francisco til Honolulu. Se flere flybilleder. Warren M. Bodie -samling 10.-11. Januar -
 Hvad hvis Jordens magnetfelt vendte?Jordens magnetfelt har vendt mange gange gennem dets eksistens. Hvad kan du forvente, når det sker? PASIEKA/Science Photo Library/Getty Images Forestil dig at komme ud af sengen og finde en omvendt v
Hvad hvis Jordens magnetfelt vendte?Jordens magnetfelt har vendt mange gange gennem dets eksistens. Hvad kan du forvente, når det sker? PASIEKA/Science Photo Library/Getty Images Forestil dig at komme ud af sengen og finde en omvendt v