


Software på Mars rover gør det muligt at vælge forskningsmål selvstændigt
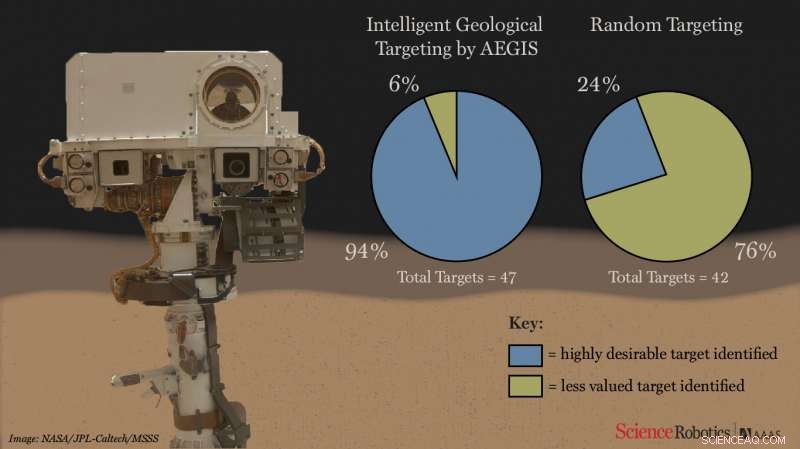
tager kun 21, 000 af Curiosity-missionens i alt 3,8 millioner linjer kode, AEGIS valgte nøjagtigt ønskede mål over 2,5 kilometer uudforsket Mars-terræn 93 % af tiden, sammenlignet med de 24 %, der forventes uden softwaren. I dette tilfælde, det ønskede mål var fremspring, en type Mars-sten, der er ideel til at analysere den røde planets geologiske historie. Kredit:Carla Schaffer / AAAS
(Phys.org) – Et team af forskere fra USA, Danmark og Frankrig har lavet en rapport om oprettelse og brug af software, der skal give udforskende robotter i rummet mere autonomi. I deres papir offentliggjort i tidsskriftet Videnskab robotik , teamet beskriver softwaren, kaldet Autonomous Exploration for Gathering Increased Science (AEGIS), og hvor godt den klarede sig på Mars-roveren Curiosity.
På grund af deres begrænsede computerkraft og afstand fra Jorden, rumforskere mener, at det ville være en fordel for udforskende robotter at have muligheden for at vælge, hvilke ting der skal studeres. Det ville også give mulighed for mere forskning, når en robot ikke er i stand til at kommunikere med Jorden, som når det er på den modsatte side af en planet. Uden et sådant system, en robot skulle scanne et område, fotografere det, send de fotografiske billeder tilbage til Jorden og vent derefter på instruktioner om, hvad de skal gøre. Med et sådant system, en robot som Curiosity kunne scanne horisonten, vælg en genstand at studere og kør så hen og studere den. Denne tilgang ville spare meget tid, giver robotten mulighed for at studere flere objekter, før dens levetid udløber. På grund af det, NASA bestilte et team til at skabe sådan software, som til sidst blev til AEGIS. Softwaren blev testet og derefter uploadet til Curiosity i maj 2016 og blev brugt 54 gange i løbet af de næste 11 måneder.
Softwaren tillader roveren at kontrollere, hvad der er blevet døbt ChemCam, som er en enhed, der bruges til at studere sten eller andre geologiske træk - en laser affyres mod et mål, og derefter måler sensorer de gasser, der opstår som et resultat.
Forskerne rapporterer, at de fandt, at systemet var 93 procent nøjagtigt sammenlignet med 24 procent uden dets brug. Softwaren, de hævder, sparet mange timers missionstid, som blev brugt til at deltage i andre nyttige aktiviteter såsom at studere meteoritindhold. De rapporterer også, at softwaren tillod en stigning i ChemCam-målretning fra 256 pr. dag til 327, hvilket betød, at der blev indsamlet mere data på samme tid.
-

(A) ChemCam-blikket. (B) ChemCam skyder lasere mod sten for at analysere deres indhold, efterlader synlige mærker både på overfladen (øverst til højre) og inde i borehullet på 16 mm i diameter (midten) på dette "Windjana"-borested. (C) ChemCam-målte jordmål. (D) Remote Micro-Imager på ChemCam skyder højfokusbilleder af fjerne mål, såsom dette område i Peace Vallis alluviale fan, cirka 25 km væk. Kredit:Francis et al., Sci. Robot. 2, eaan4582 (2017)
-
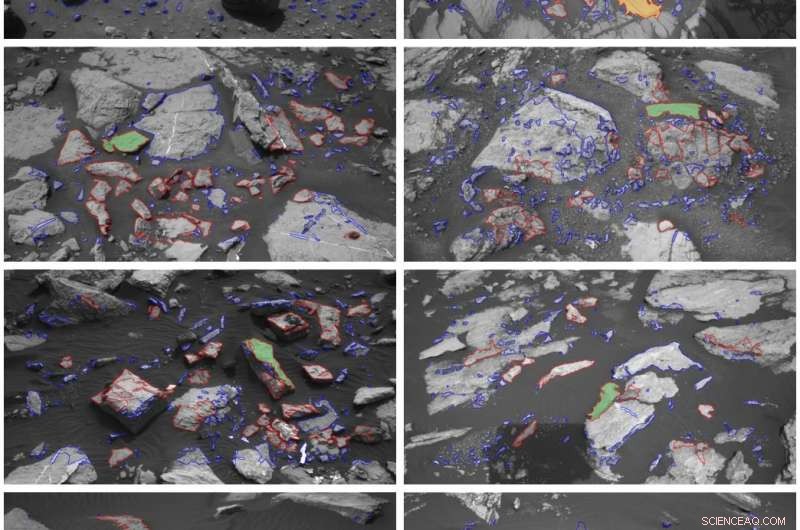
Eksempler på AEGIS målvalg, indsamlet fra Mars dag 1400 til 1660. Mål skitseret med blåt blev afvist; de røde skitserede blev bibeholdt. Toprangerede mål er skraveret grønt, og andenrangerede mål er skraveret orange. Kredit:Francis et al., Sci. Robot. 2, eaan4582 (2017)
-
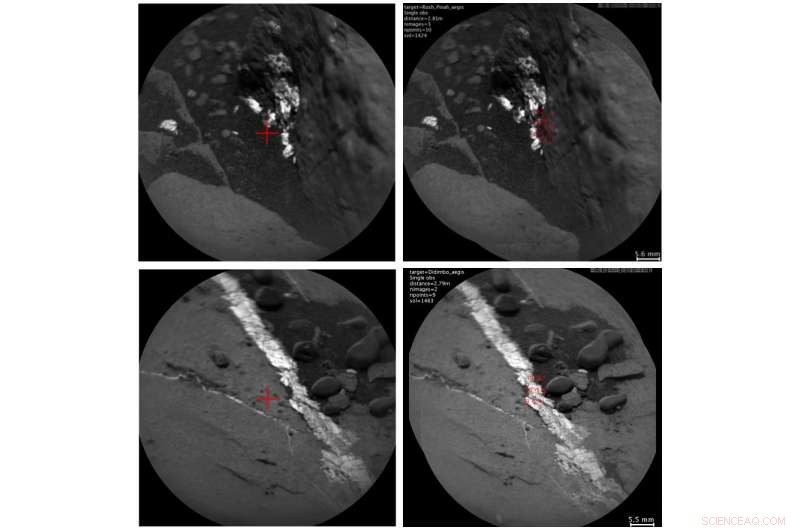
Eksempler på AEGIS, der fikser menneskelige kommandoer, der mangler målet, kaldet "autonom pegende raffinement". (EN, C) Menneskeberegnede mål med rødt. (B, D) Målforfining af AEGIS angivet med rødt. Kredit:Francis et al., Sci. Robot. 2, eaan4582 (2017)
© 2017 Phys.org
 Varme artikler
Varme artikler
-
 Denne galakse er ingen match for en sulten klyngeSpiralgalaksen D100, længst til højre på dette Hubble-rumteleskopbillede, bliver strippet for sin gas, da den styrter mod midten af den gigantiske Coma-galaksehob. Udlånt af NASA, ESA, M. Sun (Unive
Denne galakse er ingen match for en sulten klyngeSpiralgalaksen D100, længst til højre på dette Hubble-rumteleskopbillede, bliver strippet for sin gas, da den styrter mod midten af den gigantiske Coma-galaksehob. Udlånt af NASA, ESA, M. Sun (Unive -
 SpaceX lancerer last, men formår ikke at lande raketPå dette stillbillede fra NASA TV, SpaceX lancerer sit ubemandede Dragon-fragtskib til den internationale rumstation - missionen er SpaceXs 16. for NASA, som en del af en langsigtet kontrakt om at fær
SpaceX lancerer last, men formår ikke at lande raketPå dette stillbillede fra NASA TV, SpaceX lancerer sit ubemandede Dragon-fragtskib til den internationale rumstation - missionen er SpaceXs 16. for NASA, som en del af en langsigtet kontrakt om at fær -
 SpaceX vil prøve at genbruge mere af Falcon 9-rakettenSpace Xs Falcon 9 raket lettede fra Kennedy Space Center den 30. marts, 2017 SpaceX CEO og grundlægger Elon Musk sagde, at han ønsker at gå længere i genbrugen af sine raketter efter at have ops
SpaceX vil prøve at genbruge mere af Falcon 9-rakettenSpace Xs Falcon 9 raket lettede fra Kennedy Space Center den 30. marts, 2017 SpaceX CEO og grundlægger Elon Musk sagde, at han ønsker at gå længere i genbrugen af sine raketter efter at have ops -
 USA ønsker at privatisere den internationale rumstation:rapportDen Internationale Rumstation med rumfærgen Atlantis lagde til til højre og en russisk Soyuz yderst til venstre i 2011. Kunne den internationale rumstation blive et kommercielt foretagende drevet a
USA ønsker at privatisere den internationale rumstation:rapportDen Internationale Rumstation med rumfærgen Atlantis lagde til til højre og en russisk Soyuz yderst til venstre i 2011. Kunne den internationale rumstation blive et kommercielt foretagende drevet a
- At flytte fokus på strategier for klimaændringer kan være til gavn for de yngre generationer
- Hvorfor er det mærkeligt, metallisk stjerne suser ud af Mælkevejen?
- 3 typer remskiver
- Forstå sprøde revner for at designe stærkere materialer
- Beviser for faststof-væske kritiske punkter i vand i kulstof nanorør
- Små nanoteknologier er klar til at få en enorm indflydelse på landbruget