


Dyblærende algoritmer, der hjælper med at fjerne rumskrammel fra vores himmel
Kredit:Pixabay/CC0 Public Domain
Hvordan måler man stillingen – det vil sige 3-D-rotationen og 3-D-translationen – af et stykke rumskrot, så en gribende satellit kan fange det i realtid for med succes at fjerne det fra Jordens kredsløb? Hvilken rolle vil deep learning-algoritmer spille? Og, hvad er realtid i rummet? Dette er nogle af de spørgsmål, der bliver behandlet i et banebrydende projekt, ledet af EPFL spin-off, ClearSpace, at udvikle teknologier til at indfange og deorbitere rumaffald.
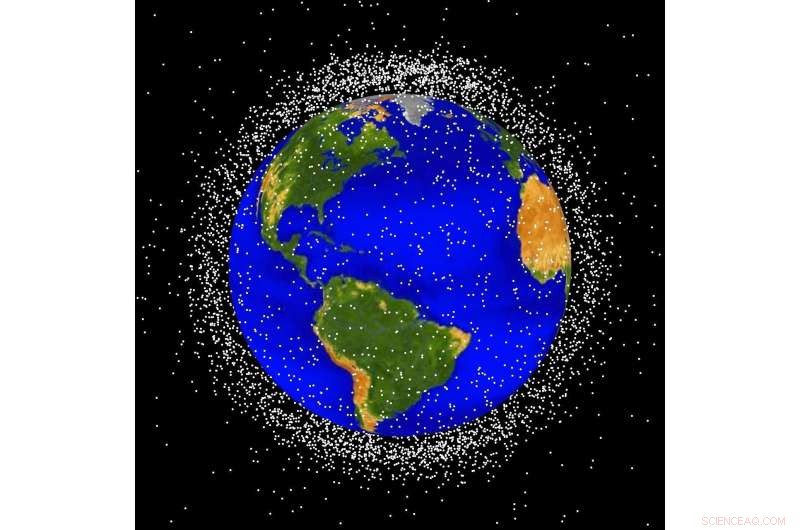
Med mere end 34, 000 stykker junk, der kredser rundt om Jorden, deres fjernelse er ved at blive et spørgsmål om sikkerhed. Tidligere på måneden var en gammel sovjetisk Parus-navigationssatellit og en kinesisk ChangZheng-4c-raket involveret i en næstenulykke, og i september gennemførte den internationale rumstation en manøvre for at undgå en mulig kollision med et ukendt stykke rumaffald, mens besætningen på ISS Expedition 63 rykkede tættere på deres Soyuz MS-16 rumfartøj for at forberede en potentiel evakuering. Med mere skrammel samler sig hele tiden, satellitkollisioner kan blive almindelige, gør adgangen til rummet farlig.
ClearSpace-1, virksomhedens første mission sat til 2025, vil involvere genvinding af den nu forældede Vespa Overdel, en nyttelastadapter, der kredser 660 kilometer over Jorden, som engang var en del af Den Europæiske Rumorganisations Vega-raket, for at sikre, at det igen kommer ind i atmosfæren og brænder op på en kontrolleret måde.
En af de første udfordringer er at gøre det muligt for robotarmene på en fangeraket at nærme sig Vespaen fra den korrekte vinkel. Til denne ende, den vil bruge et vedhæftet kamera – dets øjne – til at finde ud af, hvor rumskrotet er, så det kan gribe fat i Vespaen og derefter trække det tilbage i atmosfæren. "Et centralt fokus er at udvikle deep learning algoritmer til pålideligt at estimere 6D-posituren (3 rotationer og 3 translationer) af målet fra videosekvenser, selvom billeder taget i rummet er vanskelige. De kan være over- eller undereksponerede med mange spejllignende overflader, " siger Mathieu Salzmann, en videnskabsmand, der står i spidsen for projektet i EPFL's Computer Vision Laboratory ledet af professor Pascal Fua, på Skolen for Data- og Kommunikationsvidenskab.
Imidlertid, der er en fangst. Ingen har rigtig set Vespaen i syv år, da den har snurret i et vakuum i rummet. Vi ved, at den er omkring 2 meter i diameter, med kulfibre, der er mørke og lidt skinnende, men er det stadig sådan det ser ud?
EPFL's Realistic Graphics Labis simulerer, hvordan dette stykke rumskrot ser ud som 'træningsmateriale' for at hjælpe Salzmanns dybe læringsalgoritmer med at forbedre sig over tid. "Vi producerer en database med syntetiske billeder af målobjektet, inklusive både jordens baggrund rekonstrueret fra hyperspektrale satellitbilleder, og en detaljeret 3-D-model af Vespa's øverste trin. Disse syntetiske billeder er baseret på målinger af virkelige materialeprøver af aluminium- og kulfiberpaneler, erhvervet ved hjælp af vores laboratoriums goniofotometer. Dette er en stor robot-enhed, der drejer rundt om en prøveprøve for samtidig at belyse og observere den fra mange forskellige retninger, give os et væld af oplysninger om materialets udseende, siger adjunkt Wenzel Jakob, leder af laboratoriet. Når missionen starter, forskere vil være i stand til at fange nogle virkelige billeder uden for vores atmosfære og finjustere algoritmerne for at sikre, at de fungerer in situ.
En tredje udfordring vil være behovet for at arbejde i rummet, i realtid og med begrænset computerkraft ombord på ClearSpace-optagelsessatellitten. Dr. Miguel Peón, en Senior Post-Doctoral Collaborator med EPFL's Embedded Systems Lab leder arbejdet med at overføre deep learning-algoritmerne til en dedikeret hardwareplatform. "Da bevægelse i rummet opfører sig godt, algoritmerne til estimering af stilling kan udfylde hullerne mellem genkendelser med et sekunds mellemrum, lette beregningspresset. Imidlertid, at sikre, at de selvstændigt kan klare alle usikkerheder i missionen, Algoritmerne er så komplekse, at deres implementering kræver at presse al ydeevne fra platformens ressourcer, " siger professor David Atienza, leder af ESL.
Det er klart, at design af algoritmer til at være 100 % pålidelige i så barske, og relativt ukendt, betingelser, og som udfører i realtid ved hjælp af begrænsede beregningsressourcer, er en kæmpe udfordring. For Salzmann, dette er en del af projektets attraktion, "Vi skal være absolut pålidelige og robuste. Fra et forskningsperspektiv, du er typisk tilfreds med 90 % succes, men det er noget, vi ikke rigtig har råd til i en rigtig mission. Men måske er det mere spændende ved projektet, at vi udvikler en algoritme, der med tiden vil fungere i rummet. Jeg synes, det er helt fantastisk, og det er det, der motiverer mig hver dag!"
Dette banebrydende arbejde er blevet udført med støtte fra teamet hos Microsoft for Startups, der leverede Azure-processorkraft.
 Varme artikler
Varme artikler
-
 En af de tætteste galaksehobe i universet afsløresKredit:Instituto de Astrofísica de Canarias En undersøgelse offentliggjort for nylig i tidsskriftet Natur astronomi og som stiller spørgsmålstegn ved nuværende modeller for strukturdannelse i un
En af de tætteste galaksehobe i universet afsløresKredit:Instituto de Astrofísica de Canarias En undersøgelse offentliggjort for nylig i tidsskriftet Natur astronomi og som stiller spørgsmålstegn ved nuværende modeller for strukturdannelse i un -
 AI finder mere end 1, 200 kandidater til gravitationslinserEn gravitationslinse fundet i DESI Legacy Surveys data. Der er fire sæt linsebilleder, der svarer til fire baggrundsgalakser, som fremstår som delvise ringe omkring en orange galakse i midten og forgr
AI finder mere end 1, 200 kandidater til gravitationslinserEn gravitationslinse fundet i DESI Legacy Surveys data. Der er fire sæt linsebilleder, der svarer til fire baggrundsgalakser, som fremstår som delvise ringe omkring en orange galakse i midten og forgr -
 Jordens magnetiske poler kan begynde at vende. Hvad sker der så?Det magnetiske felt, der beskytter vores planet, stammer dybt i jordens kerne, men svinger i styrke over tid. Kredit:ESA/ATG medialab Da Jordens magnetiske skjold svigter, det samme gør dens satel
Jordens magnetiske poler kan begynde at vende. Hvad sker der så?Det magnetiske felt, der beskytter vores planet, stammer dybt i jordens kerne, men svinger i styrke over tid. Kredit:ESA/ATG medialab Da Jordens magnetiske skjold svigter, det samme gør dens satel -
 NASA beder tilskuere om astronautopsendelse:Bliv venligst hjemme!På dette billede fra en video, der er gjort tilgængelig af NASA, astronauterne Bob Behnken, venstre, og Doug Hurley holder en pressekonference i Johnson Space Center i Houston på fredag, 1. maj, 2020.
NASA beder tilskuere om astronautopsendelse:Bliv venligst hjemme!På dette billede fra en video, der er gjort tilgængelig af NASA, astronauterne Bob Behnken, venstre, og Doug Hurley holder en pressekonference i Johnson Space Center i Houston på fredag, 1. maj, 2020.
- Organiske molekyler på en metaloverflade... en maskinmesters bedste ven
- Seaweed Facts for Kids
- Virgin Galactic siger, at FAA har godkendt det til yderligere flyvninger
- Hvordan laver man en RNA & en DNA-model
- Højhastighedsfilm hjælper videnskabsmænd, der designer glødende molekyler
- Om en Wolfs Sense of Smell