


Det er tid til at studere månens lavarør. Her er en mission, der kan hjælpe

Månen tigger praktisk talt om at blive udforsket, og momentum til at gøre det er ved at opbygges. Artemis-programmets indsats for at returnere astronauter til månen for første gang siden Apollo-missionerne fanger stor opmærksomhed. Men der er andre bestræbelser på vej.
I 2023 udsendte ESA en opfordring til små månemissioner. Opkaldet var forbundet med deres Terra Novae-udforskningsprogram, som vil fremme ESA's udforskning af solsystemet med robotspejdere og forløbermissioner. "Mennesket vil drage fordel af de nye opdagelser, ambitioner, videnskab, inspiration og udfordringer," forklarer ESA på deres Terra Novae-websted.
Terra Novae har flere mål, hvoraf det ene er at "lande flere videnskabelige nyttelaster på månens overflade, efterforskning efter tilstedeværelsen af vand og andre flygtige materialer, der både vil afsløre dens historie og hjælpe med at forberede bæredygtig udforskning af lokalt fremskaffede rumressourcer. "
Som svar på ESA's opfordring har et hold europæiske forskere foreslået LunarLeaper. LunarLeaper er en hoppende robot, der ville besøge et månens ovenlysvindue, en kollapset del af et månens lavarør. Robotten ville give os vores første kig på månens undergrund og lavarørene.
Der er gode grunde til at udforske disse lavarør. Månens overflade udsættes for sol- og kosmisk stråling uden fordelen ved en beskyttende atmosfære eller magnetosfære som Jorden. Astronauter kunne give ly i disse rør inde i habitatmoduler. Flere meter sten ovenover ville give beskyttelse mod stråling og mod månens temperatursvingninger. Der kunne også være laboratoriemoduler og andre moduler. Rørene kan, hvis det er passende, beskytte en hel base.
Den anden grund er videnskabelig. Disse rør er et vindue ind i månens vulkanske fortid. De er en registrering af omfanget og timingen af vulkansk aktivitet.
LunarLeaper er en ca. 10 kg (22 lbs) springende robot med tre ben. Den er baseret på ETH SpaceHopper-designet, som er blevet forfinet gennem fire års udvikling. SpaceHopper er designet til at besøge asteroider med meget svagere tyngdekraft end månen, men designet kan tilpasses til at fungere på månens overflade.
LunarLeaper-teamet foreslår en mission til Marius Hills-regionen. Det er en region i Oceanus Procellarum, en stor månehoppe på den nærmeste side af månen. Det er et vulkansk område dækket af basaltoversvømmelser fra gammel vulkansk aktivitet. Marius Hills er opkaldt efter krateret Marius med en diameter på 41 km (25 mi) og er fyldt med vulkanske træk som riller, kupler og kegler.
Det særlige træk af interesse i Marius Hills er Marius Hills Pit (MHP), et kollapset ovenlysvindue, der giver adgang til, hvad der kunne være et omfattende månens lavarørsystem. Lunar Reconnaissance Orbiter fangede et billede af den spændende åbning på hovedbilledet. Det er der, LunarLeaper ville gøre sit arbejde.
Leaperen ville bevæge sig rundt på kanten af MHP'en og fange billeder af pitvæggene og gulvet. Det ville også bruge sin suite af videnskabelige instrumenter til at indsamle relevante data. Dens instrumentsuite ville omfatte et gravimeter, en jordgennemtrængende radar, et dedikeret videnskabskamera og forhåbentlig et spektrometer.
LunarLeaper-teamet skitserer fire spørgsmål, som missionen håber at besvare:
- Er der et lavarør under Marius Hills? Det ser bestemt ud til, at der kunne være det, men der er ingen bekræftelse endnu, og kun en mission til regionen kan besvare spørgsmålet med sikkerhed.
- Kunne astronauter bruge røret til beboelse? Hvis det er stabilt nok, kunne de, og det er noget, LunarLeaper kan finde ud af.
- Hvordan blev røret og gruben dannet? Hvilke vulkanske processer var på arbejde? Der er lavarør på Jorden. Opstod de på samme måde på månen? LunarLeaper kan undersøge lagene på rørets vægge for spor.
- Hvad er indeholdt i regolitten uden for røret? Er der ældgamle stykker af paleoregolith under jorden nær pit? Månens overflader er nedbrudt og eroderet, men nedgravet regolit kan indeholde spor til det tidlige solsystem, inklusive solen.
Selvom der er hundredvis af lignende gruber på månen, ser MHP ud til at være den mest lovende. Det er blevet afbildet fra forskellige belysningsvinkler, og billeddannelsen understøtter ideen om, at et rør strækker sig under jorden ud over ovenlysvinduet. Da Marius-bakkerne er fyldt med vulkanske træk, er et forlænget rør ikke usandsynligt.
LunarLeaper ville rejse rundt på overfladen nær MHP og bruge sin jordgennemtrængende radar til at afdække omfanget af rørsystemet. Andre foreslåede missioner er rettet mod lavarør og ovenlysvinduer, men de har tendens til at være mere komplekse, større og dyrere. Som en 10 kg hopperobot ville LunarLeaper være et klogt valg til den første mission, der karakteriserer MHP'en, inden den sender en mere kompleks, grundig mission.
Når det kommer til at udforske pit, har LunarLeaper en betydelig fordel i forhold til en rover på hjul. Rovere på hjul vælger ruter baseret på undgåelse af forhindringer. De har nogle strenge begrænsninger, når det kommer til det terræn, de sikkert og effektivt kan krydse.
Dog forventes kanten af MHP at være udfordrende. Der er sandsynligvis komplekst terræn og stejle skråninger lige i nærheden af åbningen. At komme så tæt som muligt på fælgen vil give bedre billeddannelse og videnskabelige resultater. LunarLeaper har en fordel i forhold til rovere på hjul i denne type terræn, selvom afvejningen er dens meget lettere nyttelast.
Men som et første skridt i at udforske MHP har LunarLeaper nogle klare fordele.
LunarLeaper-teamet siger, at den lille robot kunne leveres til månens overflade af en af de adskillige små landere, der er designet af forskellige virksomheder. De fastlægger omkostningerne til omkring 50 millioner euro. De siger også, at denne type springrobot med ben kan være en stor del af fremtidens rumudforskning, og at deres mission, hvis den bliver valgt, kan være en nøgleudvikling for fremtiden.
Leveret af Universe Today
 Varme artikler
Varme artikler
-
 Små sonder holder stort løfte for fremtidige NASA-missionerDette billede viser indgangssonden og den ydre metalskal. Metalkappen tillader sonden at blive forbundet med forsyningsskibet og letter også sonden at blive frigivet under opbrud af forsyningsrumfartø
Små sonder holder stort løfte for fremtidige NASA-missionerDette billede viser indgangssonden og den ydre metalskal. Metalkappen tillader sonden at blive forbundet med forsyningsskibet og letter også sonden at blive frigivet under opbrud af forsyningsrumfartø -
 Forskere etablerer ny tidslinje for det gamle magnetfelt på MarsKredit:CC0 Public Domain Mars havde et globalt magnetfelt meget tidligere - og meget senere - i planetens historie, end forskerne tidligere har vidst. En planets globale magnetfelt opstår fra det
Forskere etablerer ny tidslinje for det gamle magnetfelt på MarsKredit:CC0 Public Domain Mars havde et globalt magnetfelt meget tidligere - og meget senere - i planetens historie, end forskerne tidligere har vidst. En planets globale magnetfelt opstår fra det -
 Mysteriet om usædvanligt neutronstjernesystem afsløret efter 20 år, tak til tusindvis af frivilli…Kredit:University of Manchester Efter mere end to årtier, et internationalt forskerhold har identificeret en galaktisk mystisk kilde til gammastråler:en tung neutronstjerne med en følgesvend med m
Mysteriet om usædvanligt neutronstjernesystem afsløret efter 20 år, tak til tusindvis af frivilli…Kredit:University of Manchester Efter mere end to årtier, et internationalt forskerhold har identificeret en galaktisk mystisk kilde til gammastråler:en tung neutronstjerne med en følgesvend med m -
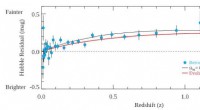 Nye beviser viser, at nøgleantagelsen i opdagelsen af mørk energi er fejlagtigFigur 1. Lysstyrkeudvikling, der efterligner mørk energi i supernova (SN) kosmologi. Hubble-resten er forskellen i SN-lysstyrke i forhold til den kosmologiske model uden mørk energi (den sorte stipled
Nye beviser viser, at nøgleantagelsen i opdagelsen af mørk energi er fejlagtigFigur 1. Lysstyrkeudvikling, der efterligner mørk energi i supernova (SN) kosmologi. Hubble-resten er forskellen i SN-lysstyrke i forhold til den kosmologiske model uden mørk energi (den sorte stipled
- Ligheder mellem Mitose og Meiosis
- Nye meget selektive antitumor fotodynamiske terapimidler syntetiseret
- Sådan laver du et barometer
- Skarpe sving får floder til at vandre
- Fodbold vender tilbage på tomme stadioner:Forskning viser, at hjemmefordelen forsvinder
- Afsløring af teknologier til fremtidige løfteraketter