


Hvor selv en automatiseret, tilsluttet køretøj kan forbedre sikkerheden og spare energi i trafikken

En timelapse af trafik om natten i Ann Arbor. Kredit:Marcin Szczepanski
Tilsluttet fartpilot bruger kommunikation fra bil til bil til at lade automatiserede køretøjer reagere på flere biler ad gangen i et forsøg på at spare energi og forbedre sikkerheden.
University of Michigan forskere har vist sin effektivitet på offentlige veje, selv når kun et automatiseret køretøj bevæger sig blandt menneskedrevne biler.
Kommunikation fra bil til bil, eller V2V, refererer til bilernes evne til trådløst at dele data inklusive deres hastighed og position i realtid. Tilsluttet fartpilot kan justere et køretøjs hastighed baseret på oplysninger opnået via V2V. Det adskiller sig fra adaptiv fartpilot, idet den sporer flere køretøjer end bare bilen foran den.
Testene på offentlige veje har vist, hvordan forbundet fartpilot og V2V mellem automatiserede og konventionelle biler klarer sig i et almindeligt trafikscenario-en kædereaktionsbremse og en acceleration forårsaget af en bil i spidsen for flere andre. Et automatiseret køretøj, der benyttede tilsluttet fartpilot, var i stand til at bremse med 60 procent mindre af den G-kraft, der kræves af en bil med en menneskelig chauffør.
Og den glattere overgang fra bremsning til acceleration forbedrede energieffektiviteten med hele 19 procent for det automatiserede køretøj udstyret med V2V. Det overgik også ydeevnen for andre automatiserede køretøjer, der kører uden V2V. Resultaterne blev for nylig offentliggjort i tidsskriftet Transportforskning .
"Automatiserede biler, der bruger V2V -data, vil ikke kun fungere bedre, men de kan også fremme et venligere miljø, hvor få sikkerhedsrisici sniger sig ind i trafikken og højere effektivitet er mulig for alle biler på vejen, "sagde Gabor Orosz, en UM lektor i maskinteknik, der ledede forskningen.
Automatiske biler kommer, men de vil stå over for mange udfordringer, når de deler vejene med menneskedrevne køretøjer. Indbyggede sensorer kan ikke se rundt om hjørner eller se igennem busser og lastbiler. Hvis en bil pludselig dukker op inden for sensorernes syn, den automatiserede bil har lidt tid til at reagere og skal muligvis bremse hårdt for at undgå en mulig kollision - ligesom en menneskelig chauffør.
Tilsvarende hvis et køretøj et par biler forude udløser en bremsekaskade, indbyggede sensorer fortæller kun den automatiserede bil at reagere, når bilen umiddelbart forude rammer bremserne. Ikke at se ud over den direkte sigtlinje betyder masser af overraskelser at håndtere i kørslen.
Selvom erfarne chauffører ofte forventer potentielle sikkerhedsrisici for at køre jævnt og være sikre, automatiserede biler har stadig en lang vej at gå, hvis indbyggede sensorer er deres eneste informationskilde.
"En betydelig mængde biler på vejen vil blive udstyret med V2V -kommunikationsenheder i løbet af de næste par år, siden store bilproducenter som General Motors, Volkswagen og Toyota implementerer sådanne kommunikationsenheder på deres nye biler, "Sagde Orosz.
"De fleste af disse biler vil stadig være menneskedrevne, men de vil udsende deres bevægelsesinformation såsom position, hastighed og acceleration. Når en automatiseret bil støder på disse signaler på vejen, det kan let hente sådanne V2V-data og se trafiksituationen uden for rækkevidde af indbyggede sensorer. "
Forskningsgruppen gennemførte en række eksperimenter på offentlige veje i det sydøstlige Michigan, hvor det automatiserede køretøj modtog bevægelsesinformation fra op til seks menneskedrevne køretøjer fremad.
I forsøgene, Oroszs gruppe registrerede scenarier, hvor bremsning blev stadig mere alvorlig, mens den kaskader langs en kæde af menneskedrevne køretøjer. Da hastigheden faldt fra 55 km / t til næsten nul og derefter nåede 55 igen, nogle mennesker bremsede kraftigt op til 0,8 G, sende noget, der ikke spænder ned flyvende mod forruden. Imidlertid, den V2V-baserede automatiserede kørselsalgoritme opretholdt en stabilere hastighedsprofil, glider gennem krusninger af hurtigt skiftende trafik. Decelerationen af det automatiserede køretøj blev holdt mindre end 0,3 G, ikke spild en dråbe fra en hel kop kaffe.
"V2V -data gør det muligt for den automatiserede bil at forudse, hvordan trafikken foran kan bremse, når nogen begynder at bremse flere køretøjer fremad, "Sagde Orosz." Den V2V-baserede tilsluttede fartpilot letter derefter gassen og forbereder sig på at bremse tidligt, aften ude i bruntene, når en automatiseret bil går gennem stop-and-go-trafikbølger.
"I modsætning, en sensorbaseret adaptiv fartpilot ville først begynde at bremse, efter at bilen umiddelbart foran startede med at bremse, et par sekunder efter at farten udsendes af V2V. Og de få sekunder kan være afgørende, når du kører i tæt trafik. "
Sikkerhed og komfort er ikke de eneste fordele, en automatisk bil kan høste fra V2V-oplysninger fra nærliggende menneskedrevne biler. Oroszs gruppe fandt også ud af, at den V2V-baserede automatiserede kørselsalgoritme kan spare energi i stop-and-go-trafik sammenlignet med traditionelle sensorbaserede algoritmer. Trods alt, mere stabil hastighed betyder mindre energi spildt ved bremsning og højere kilometertal for en gallon brændstof eller en pakke batteri. Og selv menneskedrevne biler, der følger det automatiserede køretøj, kan spare op til 7 procent energi, takket være den glattere hastighedsprofil.
Undersøgelsen har titlen, "Eksperimentel validering af tilsluttet automatiseret køretøjsdesign blandt menneskedrevne køretøjer." Undersøgelsen blev finansieret af Mcity, et UM-ledet offentlig-privat partnerskab, der arbejder på at fremskynde avancerede mobilitetskøretøjer og teknologier.
 Varme artikler
Varme artikler
-
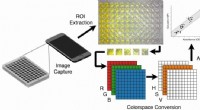 Selfies til selvdiagnose:Algoritme forstærker smartphones til at diagnosticere sygdomBilleder af et diagnostisk assay er taget med et smartphone -kamera. Interessegrupper ekstraheres og konverteres til HSV (farvetone, mætning, værdi) plads. Efter konverteringsprocessen, standardpixeli
Selfies til selvdiagnose:Algoritme forstærker smartphones til at diagnosticere sygdomBilleder af et diagnostisk assay er taget med et smartphone -kamera. Interessegrupper ekstraheres og konverteres til HSV (farvetone, mætning, værdi) plads. Efter konverteringsprocessen, standardpixeli -
 News Corp leder anklager mod tech -giganter i Australien efterforskningAustralske mediegrupper argumenterer for, at Facebook og Googles dominans af digital annoncering i væsentlig grad underminerede nyhedsindustrien Rupert Murdochs News Corporation anklagede Facebook
News Corp leder anklager mod tech -giganter i Australien efterforskningAustralske mediegrupper argumenterer for, at Facebook og Googles dominans af digital annoncering i væsentlig grad underminerede nyhedsindustrien Rupert Murdochs News Corporation anklagede Facebook -
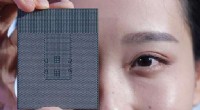 Kinas Huawei afslører chip til det globale big data-markedEn Kunpeng 920-chip vises under en afsløringsceremoni i Shenzhen, Kina, Mandag, 7. januar, 2019. Den kinesiske telekomgigant Huawei afslørede en processorchip til datacentre og cloud computing, da den
Kinas Huawei afslører chip til det globale big data-markedEn Kunpeng 920-chip vises under en afsløringsceremoni i Shenzhen, Kina, Mandag, 7. januar, 2019. Den kinesiske telekomgigant Huawei afslørede en processorchip til datacentre og cloud computing, da den -
 Britisk cyberekspert anklaget for at lyve til FBI om malwareI denne 15. maj, 2017, fil foto, Den britiske cybersikkerhedsforsker Marcus Hutchins, stemplet som en helt for at bremse WannaCry globale cyberangreb, holder pause under et interview i Ilfracombe, Eng
Britisk cyberekspert anklaget for at lyve til FBI om malwareI denne 15. maj, 2017, fil foto, Den britiske cybersikkerhedsforsker Marcus Hutchins, stemplet som en helt for at bremse WannaCry globale cyberangreb, holder pause under et interview i Ilfracombe, Eng
- Forskere udvikler isskabelonet fyldstofskelet med forbedret termisk ledningsevne
- Undtagelsestilstand erklæret, da skovbrande i Californien raser
- Et lille guldbur reagerer på lys, Åbning for at tømme dens indhold
- Musk foreslår mini-ubåd for at redde thailandske hulegutter
- Kemikere fremstiller termohærdende polymer ved hjælp af amin og triketon, der kan genbruges
- Undersøgelse afslører overraskende nye beviser for virkningerne af klimaændringer i Arktis