


En cyborg kakerlak kunne en dag redde dit liv
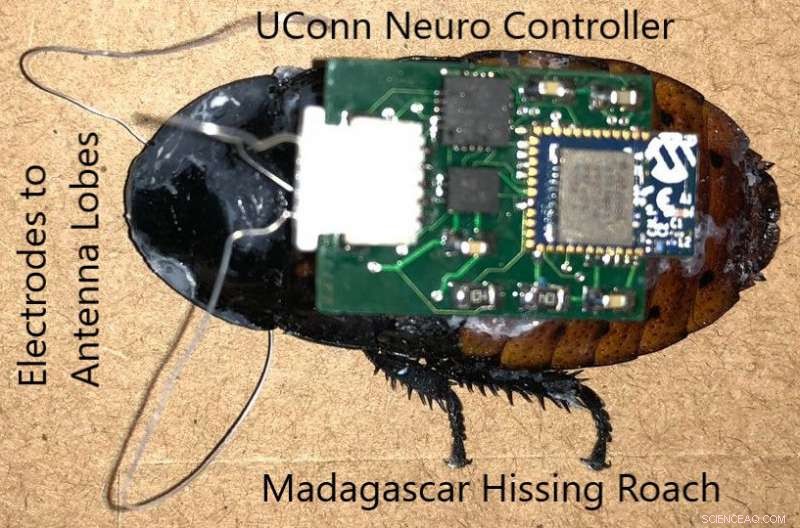
En kakerlak med en implanteret neurokontroller. Kredit:Dutta Lab
En kakerlak, der ikke er større end en stor papirclips, suser hen over gulvet i Abhishek Duttas laboratorium ved University of Connecticut.
Nogle forskere er måske chokerede over at se sådan en berygtet besøgende indtage deres forskningsrum.
Men ikke Dutta. Han ser opmærksomt på, når kakerlakken bevæger sig til venstre, og så lige, gik derefter igen, da den krydser det kølige klinkegulv. Hans interesse er velbegrundet, for det er ham, der initierer det lille væsens bevægelser med en lille håndholdt enhed cirka 15 fod væk.
Madagaskars hvæsende kakerlak i dette laboratorium er ikke bare noget gammelt medlem af ordren Blattodea. Det er en robot-roach hybrid, et fastbundet biologisk insekt-en cyborg om man vil-og dets fremtidige højteknologiske brødre kan en dag redde dit liv.
"Brug af insekter som platforme for små robotter har utroligt mange nyttige applikationer, fra eftersøgning og redning til nationalt forsvar, "siger Dutta, en adjunkt i el- og computerteknik, der har specialiseret sig i optimering af kontrolsystemer og cyberfysiske systemer.
Kakerlakkerobotter er ikke nye, imidlertid. Forskere har undersøgt biorobotiske platforme for insekter i den bedre del af det sidste årti. Men det er ikke let at bygge robotsystemer i en sådan miniatureskala, og teknologien ser ud til kun at virke cirka halvdelen af tiden.
I et papir, der snart offentliggøres i Proceedings of the Conference on Cognitive Computational Neuroscience , Philadelphia 2018, Dutta, og bachelor Evan Faulkner, en junior, der arbejder i sit laboratorium, rapportere deres oprettelse af et mikrokredsløb, som de siger tillader mere pålidelig og præcis kontrol af robotinsektbevægelse.
For at forbedre kontrollen med insektet, Duttas mikrokredsløb indeholder en 9-akset inertial måleenhed, der kan registrere roachens seks grader af fri bevægelighed, dens lineære og rotationsacceleration, og dens kompasretning. En anden funktion, som Dutta og Faulkner tilføjede, er den omgivende temperatur omkring væsenet, fordi test har vist, at temperaturen i det miljø, hvor en roach bevæger sig, kan påvirke, hvordan og hvor insektet bevæger sig. Kakerlakker, for ordens skyld, er mere tilbøjelige til at gå ture, når det er varmt.
Mikrokredsløbet, Dutta og Faulkner skabte, er en del af en lille elektronisk 'rygsæk', der kan spændes fast på bagsiden af en kakerlak. Ledninger fra enheden er fastgjort til insektets antennelapper. En lillebitte Bluetooth -sender og modtager gør det muligt for en nærliggende operatør at kontrollere roachens bevægelser via en almindelig mobiltelefon. Ved at sende små elektriske impulser til nervevævet i insektets højre eller venstre antallapp får insektet til at tro, at det er stødt på en forhindring. En lille ladning til venstre antenne får insektet til at bevæge sig væk til højre. Ligeledes, en ladning sendt til den højre antenne får insektet til at bevæge sig til venstre. Det er servostyring omdefineret.
Mens andre laboratorier har udviklet lignende kontrolsystemer, UConn's mikrokredsløb er karakteristisk ved, at det giver operatører en større grad af kontrol over insektets bevægelse, realtidsfeedback af insektets neuromuskulære reaktion på kunstige stimuli, og flerkanalsmuligheder til stimulering af insektets nervevæv. Resultatet er et mere informeret og præcist kontrolsystem.
UConn-systemets mikrokontroller og det indbyggede potentiometer lader operatører variere udgangsspændingen, frekvens, og cyklus af stimuli sendt til insektet. (Et potentiometer, hvis du undrer dig over, er det korrekte navn på en elektronisk enhed, der justerer spændingen. Det er det, der muliggør lysdæmpere, og giver dig mulighed for at justere lydstyrken på dit stereoanlæg.) Den stimulus, der resulterede i den mest robuste reaktion fra kakerlakken, var omkring 1,2V amplitude, 55 Hz frekvens, og 50 procent arbejdscyklus. (Ingen kakerlakker blev såret ved disse forsøg, i øvrigt.)
En interessant smule forskerne bemærkede var, at roachens bevægelser til venstre eller højre som reaktion på kunstig stimulering faldt i intensitet efter den indledende stimulus. Så hvis kakerlakken kom hårdt til venstre, efter at den første elektroniske puls ramte sin højre antennelapp, dens tur var mindre dramatisk med hver efterfølgende puls til den lap. Forskerne er ikke sikre på, hvorfor dette sker, men det er praktisk information at vide, hvornår det er dig, der styrer.
Mest vigtigt, Dutta siger, systemet tillod brugere at udnytte real-time feedback sendt via Bluetooth-systemet til at indstille specifikke parametre til stimulering af insektets antennelapper, og det tillod dem at styre insektet i en ønsket retning.
"Vores mikrokredsløb giver et sofistikeret system til indsamling af realtidsdata om et insekts retning og acceleration, som giver os mulighed for at ekstrapolere sin bane, "siger Dutta." Vi tror på denne avancerede lukkede sløjfe, modelbaseret system giver bedre kontrol til præcisionsmanøvrering, og overvinder nogle af de tekniske begrænsninger, der i øjeblikket plager nutidens mikrorobotter. "
Selvom det nye mikrokredsløb bestemt er et skridt fremad for robotinsektteknologi, Dutta erkender, at der er behov for meget mere forskning. Insektdrevne biobots, du kan sige, er stadig i deres larvestadium. Løbende fremskridt inden for design af mikrohardware og mikrostyringssystemer kan føre til en ny generation af enheder, der fungerer endnu bedre.
Sidste artikelGoogle AI -forsker annoncerer Dataset Search
Næste artikelAlt-i-et lysdrevet vandopdeling
 Varme artikler
Varme artikler
-
 UK regulatorer søger Cambridge Analytica kontorerFodgængere passerer den fælles bygning, som huser Cambridge Analyticas kontorer i det centrale London den 21. marts, 2018 Britiske tilsynsmyndigheder begyndte fredag at ransage Cambridge Analyti
UK regulatorer søger Cambridge Analytica kontorerFodgængere passerer den fælles bygning, som huser Cambridge Analyticas kontorer i det centrale London den 21. marts, 2018 Britiske tilsynsmyndigheder begyndte fredag at ransage Cambridge Analyti -
 Forskere laver et labyrintløbende kunstig intelligens-program, der lærer at tage genvejeEt AI-system lærer at tage genveje. Kredit: Natur (2018). DOI:10.1038/s41586-018-0102-6 Kald det en MAZE-ing udvikling:Et U.K.-baseret team af forskere har udviklet et kunstig intelligens-program
Forskere laver et labyrintløbende kunstig intelligens-program, der lærer at tage genvejeEt AI-system lærer at tage genveje. Kredit: Natur (2018). DOI:10.1038/s41586-018-0102-6 Kald det en MAZE-ing udvikling:Et U.K.-baseret team af forskere har udviklet et kunstig intelligens-program -
 At kombinere ægte, virtuelle verdener forbedrer test af førerløse køretøjerEt billede af skærmen i Michigan Traffic Lab, mens et virtuelt tog (i grønt) kører gennem en jernbaneoverskæring ved Mcity. Rigtige (røde) og simulerede køretøjer (blå) reagerer. Kredit:Skærmbillede f
At kombinere ægte, virtuelle verdener forbedrer test af førerløse køretøjerEt billede af skærmen i Michigan Traffic Lab, mens et virtuelt tog (i grønt) kører gennem en jernbaneoverskæring ved Mcity. Rigtige (røde) og simulerede køretøjer (blå) reagerer. Kredit:Skærmbillede f -
 Et kig på stueindretningen antyder, hvordan dekorationer varierer rundt omkring i verdenBrug af maskinlæringsteknikker, forskere var i stand til at analysere omkring en million billeder for at opdage dekorative elementer i stuer over hele kloden. Kredit:Penn State Folk over hele verd
Et kig på stueindretningen antyder, hvordan dekorationer varierer rundt omkring i verdenBrug af maskinlæringsteknikker, forskere var i stand til at analysere omkring en million billeder for at opdage dekorative elementer i stuer over hele kloden. Kredit:Penn State Folk over hele verd
- Hvidhalehjorte var fremherskende i præcolumbianske Panama-fester
- Dele af det amerikanske Midtvesten oversvømmet i historiske dødelige oversvømmelser
- Fysikere fremskynder planerne for en ny Large Hadron Collider tre gange så stor
- Et filter til miljøsanering
- Næste generations laserfaciliteter ser ud til at indlede en ny æra med relativistisk plasmaforskni…
- Hvordan jordskælvsværme opstår