


En ny metode til at udtrykke robottens manglende evne
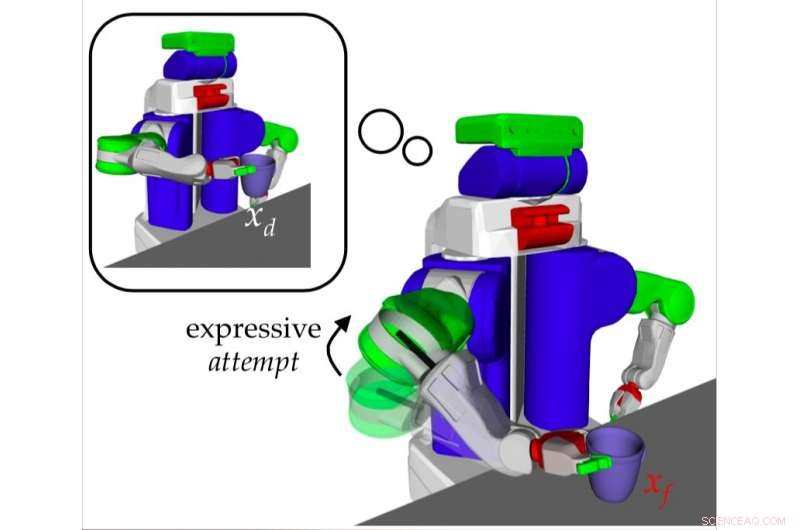
Metoden udviklet af forskerne genererer en forsøgsbevægelse, der er beregnet til at ligne vellykket udførelse (f.eks. flytning af sluteffektoren fra xf til xd), mens du overholder begrænsningerne for robottens begrænsninger. I dette eksempel, løfter sin albue for at kommunikere, at den forsøger at løfte koppen, men bægeret er for tungt til at blive løftet af det. Kredit:Kwon, Huang og Dragan.
Forskere ved Cornell University og University of California, Berkeley, har udviklet en metode til automatisk at generere bevægelser, hvormed robotter kan udtrykke deres manglende evne til at udføre en given opgave. Disse genererede bevægelser kommunikerer tydeligt både hvilken opgave robotten ikke kan udføre, og hvorfor den ikke er i stand til at fuldføre den.
"Når du interagerer med robotter, det er vigtigt for mennesker at have nøjagtige forventninger til robotkapaciteter, "Minae Kwon, en af de forskere, der har udført undersøgelsen, fortalte TechXplore. "En måde at sætte præcise forventninger på er at forstå, hvad robotter er ude af stand til at gøre, og hvorfor."
I øjeblikket, de fleste robotfejl er ekstremt uinformative. Med andre ord, når robotten ikke er i stand til at udføre en opgave, det kan stoppe brat midt i en handling eller endda nægte at begynde opgaven i første omgang. Dette gør det svært for mennesker at forstå årsagen til robottens fejl, samt at generalisere dens evner.
"Vi ønskede at finde en måde, hvorpå robotter mere intelligent kunne kommunikere deres manglende evner (dvs. hvad de forsøger at gøre, og hvorfor det vil mislykkes), selv før en fiasko sker, " sagde Kwon. "Specielt, vi fokuserede på manglende evner relateret til bevægelsesplanlægningsopgaver (f.eks. at løfte en kop, skubbe en dør), da vi ønskede at løse dette problem ved hjælp af ekspressiv bevægelse."
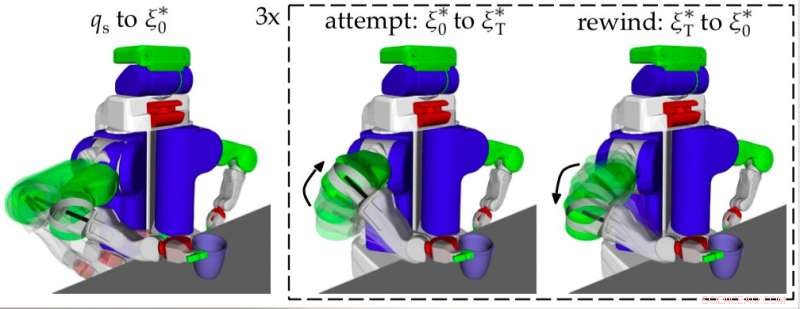
For en given ufuldstændig opgave, robotten udfører først opgaven indtil fejlpunktet (venstre), på hvilket tidspunkt den udfører forsøgsbanen ξ ∗ (center). For at understrege denne bevægelse, robotten udfører derefter det omvendte af ξ ∗ for at spole tilbage til ξ ∗ 0 (højre), og gentager dette to gange mere. Kredit:Kwon, Huang og Dragan.
Kwon, hendes kolleger Sandy Huang og deres rådgiver Anca Dragan adresserede dette problem i forbindelse med baneoptimering. Deres tilgang minimerer ligheden mellem bevægelsen, der udtrykker manglende evne, og hvad der ville gøre det muligt for robotten at udføre opgaven med succes, samtidig med at man overvejer robottens fysiske begrænsninger. Da forskerne vurderede forskellige lighedsmål, de fandt ud af, at man især generaliserede godt til en bred vifte af opgaver, at producere udtryksfulde bevægelser, der er skræddersyet til individuelle opgaver.
"Vi genererer en forsøgsbevægelse, eller en bevægelse, hvor robotten gør sit bedste for at fuldføre den bane, den ville have fulgt, som er underlagt en begrænsning, " Kwon forklarede. "At følge den ønskede bane illustrerer robottens mål, og begrænsningen illustrerer fejlen. For at kommunikere manglende evne, vi spoler fortløbende tilbage og gentager disse forsøgsbevægelser."
Metoden anvendt af forskerne genererer automatisk bevægelser, der udtrykker robottens manglende evne, kommunikerer både hvad den forsøger at opnå og årsagerne bag dens fiasko. Dette kan i sidste ende forbedre kommunikationen mellem slutbrugere og robotter, lette deres samarbejde om en bred vifte af opgaver.
"Vi synes, det er vigtigt, at folk ikke kun var i stand til at genkende robottens tilsigtede mål og årsagen til manglende evne mere tydeligt sammenlignet med andre tilgange, men at vores bevægelser også skabte et positivt billede af robotten, sagde Kwon. "For eksempel, folk var mere villige til at hjælpe robotten og samarbejde med den. Vi håber, at disse positive implikationer for samarbejde mellem mennesker og robotter vil bidrage til at forbedre den måde, vi interagerer med robotter på."
I fremtiden, metoden udviklet af Kwon, Huang og Dragan kunne hjælpe med udviklingen af mere kommunikative robotter, yderligere at forbedre interaktionen mellem mennesker og maskiner. Forskerne planlægger nu at udvikle deres tilgang yderligere, for at generere bevægelser til en bredere række af opgavefejl.
"Vi har kun målrettet en delmængde af mulige uevner, robotten kan have, udelade andre typer fejl, såsom opfattelsesfejl, " sagde Kwon. "Det er en interessant udfordring, som vi overlader til fremtidigt arbejde at finde på kreative måder at udtrykke forskellige typer af manglende evner på."
© 2018 Science X Network
 Varme artikler
Varme artikler
-
 Ny Facebook AI-applikation kan fjerne blinke dine øjne på et billedeYderligere lukkede øjne-åbnende resultater genereret med et referencebaseret Exemplar GAN. Kolonne (a) er referencebilledet, og kolonne (c) er den ind-malede version af billederne i kolonne (b) genere
Ny Facebook AI-applikation kan fjerne blinke dine øjne på et billedeYderligere lukkede øjne-åbnende resultater genereret med et referencebaseret Exemplar GAN. Kolonne (a) er referencebilledet, og kolonne (c) er den ind-malede version af billederne i kolonne (b) genere -
 Analytikere forventer en stigning i omsætningen i Tesla 2Q, men stort nettotabI denne 15. april, 2018, fil foto, solen skinner ud af bagdækket på en roadster på en Tesla -forhandlers grund i den sydlige Denver -forstad til Littleton, Colo. Teslas omsætning i andet kvartal skull
Analytikere forventer en stigning i omsætningen i Tesla 2Q, men stort nettotabI denne 15. april, 2018, fil foto, solen skinner ud af bagdækket på en roadster på en Tesla -forhandlers grund i den sydlige Denver -forstad til Littleton, Colo. Teslas omsætning i andet kvartal skull -
 Rusland tester suverænt internet blandt frygt for online -isolationEfter Kinas store firewall, vil Rusland have sit internet jerntæppe? Rusland gennemførte mandag tests for at sikre sikkerheden af sin internetinfrastruktur i tilfælde af et udenlandsk cyberangreb
Rusland tester suverænt internet blandt frygt for online -isolationEfter Kinas store firewall, vil Rusland have sit internet jerntæppe? Rusland gennemførte mandag tests for at sikre sikkerheden af sin internetinfrastruktur i tilfælde af et udenlandsk cyberangreb -
 Nyt videospil får spillere til at hjælpe med at fremme videnskabelig forskningKredit:McGill University McGill -forskere henvender sig til videospil for at udnytte borgerforskernes magt for at kortlægge tarmmikrobiomet. Takket være et samarbejde med Jérôme Waldispühl, Lekto
Nyt videospil får spillere til at hjælpe med at fremme videnskabelig forskningKredit:McGill University McGill -forskere henvender sig til videospil for at udnytte borgerforskernes magt for at kortlægge tarmmikrobiomet. Takket være et samarbejde med Jérôme Waldispühl, Lekto
- Efter COVID-19 ramte, Ansøgninger om føderal økonomisk støtte faldt kraftigt blandt førsteårss…
- Etna spyder røg og aske i spektakulære nye udbrud
- Nyt kulstof kan signalere trin-ændring for verdens mest populære batterier
- NASA måler resterne af Haikuis -nedbør over det sydlige Vietnam
- Ny, lavprisalternativ til ethylenproduktion
- Afstemning:Teenagere siger, at sociale medier får dem til at føle sig bedre