


Chips med ultralav effekt hjælper med at gøre små robotter mere kapable
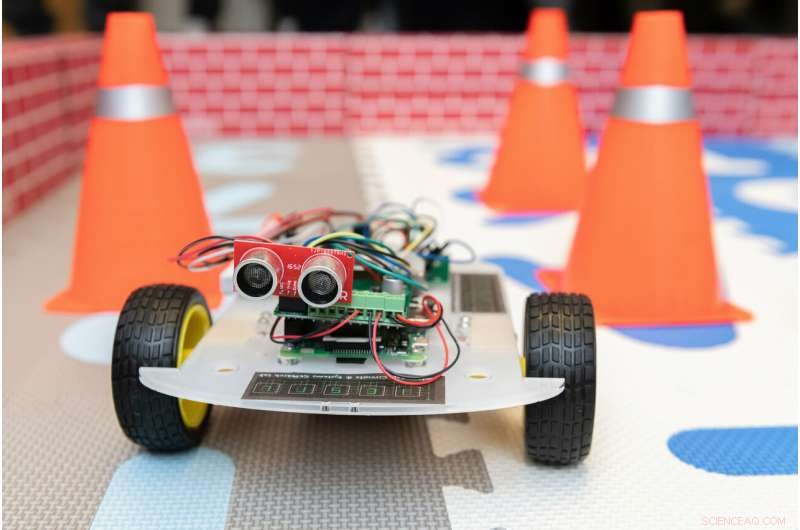
En robotbil styret af en hybridchip med ultralav effekt vises i en arena for at demonstrere sin evne til at lære og samarbejde med en anden robot. Kredit:Allison Carter, Georgia Tech
En hybridchip med ultralav effekt, inspireret af hjernen, kan hjælpe med at give robotter i håndfladestørrelse muligheden for at samarbejde og lære af deres erfaringer. Kombineret med nye generationer af laveffektmotorer og sensorer, det nye applikationsspecifikke integrerede kredsløb (ASIC) - som fungerer på milliwatt strøm - kunne hjælpe intelligente sværmrobotter med at fungere i timer i stedet for minutter.
For at spare strøm, chipsene bruger en hybrid digital-analog tidsdomæneprocessor, hvor signalernes pulsbredde koder for information. Det neurale netværk IC rummer både modelbaseret programmering og kollaborativ forstærkningslæring, potentielt give de små robotter større muligheder for rekognoscering, eftersøgning og redning og andre missioner.
Forskere fra Georgia Institute of Technology demonstrerede robotbiler drevet af de unikke ASIC'er på 2019 IEEE International Solid-State Circuits Conference (ISSCC). Forskningen blev sponsoreret af Defense Advanced Research Projects Agency (DARPA) og Semiconductor Research Corporation (SRC) gennem Center for Brain-inspired Computing Enabling Autonomous Intelligence (CBRIC).
"Vi forsøger at bringe intelligens til disse meget små robotter, så de kan lære om deres miljø og bevæge sig selvstændigt, uden infrastruktur, " sagde Arijit Raychowdhury, lektor ved Georgia Tech's School of Electrical and Computer Engineering. "For at opnå det, vi ønsker at bringe laveffektkredsløbskoncepter til disse meget små enheder, så de kan træffe beslutninger på egen hånd. Der er stor efterspørgsel efter meget små, men dygtige robotter, der ikke kræver infrastruktur."
Bilerne demonstreret af Raychowdhury og kandidatstuderende Ningyuan Cao, Muya Chang og Anupam Golder navigerer gennem en arena dækket af gummipuder og omgivet af papblokke. Mens de søger efter et mål, robotterne skal undgå trafikkegler og hinanden, lærer af omgivelserne, mens de går og kommunikerer løbende med hinanden.
Bilerne bruger inerti- og ultralydssensorer til at bestemme deres placering og detektere genstande omkring dem. Information fra sensorerne går til hybrid ASIC, som fungerer som køretøjernes "hjerne". Instruktioner går derefter til en Raspberry Pi-controller, som sender instruktioner til elmotorerne.
I robotter på størrelse med håndfladen, tre store systemer bruger strøm:motorerne og controllerne, der bruges til at drive og styre hjulene, processoren, og sansesystemet. I bilerne bygget af Raychowdhurys team, laveffekt ASIC betyder, at motorerne forbruger størstedelen af strømmen. "Vi har været i stand til at presse computerkraften ned til et niveau, hvor budgettet er domineret af motorernes behov, " han sagde.
Holdet arbejder med samarbejdspartnere om motorer, der bruger mikro-elektromekanisk (MEMS) teknologi, der er i stand til at fungere med meget mindre strøm end konventionelle motorer.
"Vi vil gerne bygge et system, hvor sansekraft, kommunikation og computerkraft, og aktivering er på omtrent samme niveau, i størrelsesordenen hundredvis af milliwatt, " sagde Raychowdhury, der er ON Semiconductor-lektor på School of Electrical and Computer Engineering. "Hvis vi kan bygge disse robotter i håndfladestørrelse med effektive motorer og controllere, vi burde være i stand til at levere driftstider på flere timer på et par AA-batterier. Vi har nu en god idé, hvilken slags computerplatforme vi skal bruge for at levere dette, men vi har stadig brug for de andre komponenter for at indhente det."
I time domain computing, information føres på to forskellige spændinger, indkodet i pulsernes bredde. Det giver kredsløbene de energieffektive fordele ved analoge kredsløb med robustheden af digitale enheder.
"Størrelsen på chippen er reduceret til det halve, og strømforbruget er en tredjedel, hvad en traditionel digital chip har brug for, " sagde Raychowdhury. "Vi brugte adskillige teknikker i både logik- og hukommelsesdesign til at reducere strømforbruget til milliwatt-området, mens vi nåede målydelsen."
Med hver pulsbredde repræsenterer en anden værdi, systemet er langsommere end digitale eller analoge enheder, men Raychowdhury siger, at hastigheden er tilstrækkelig til de små robotter. (En milliwatt er en tusindedel af en watt).
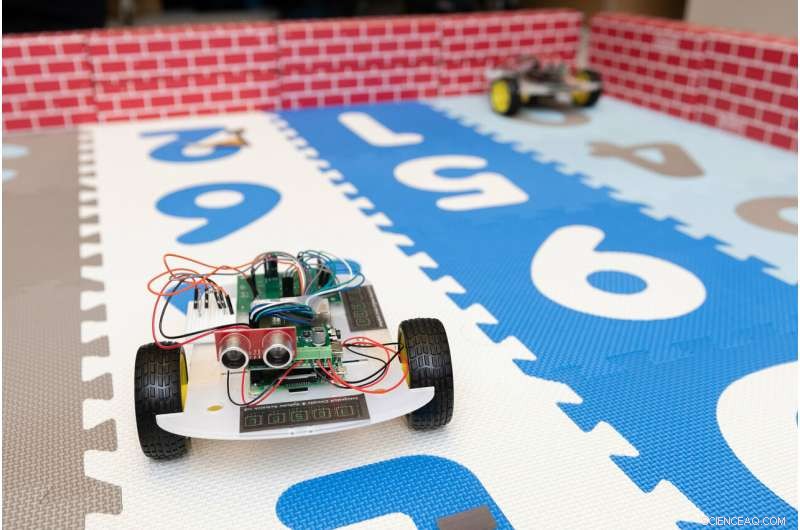
To robotbiler styret af en hybridchip med ultralav effekt vises i en testarena, hvor de vil demonstrere en evne til at lære og samarbejde. Kredit:Allison Carter, Georgia Tech
"For disse kontrolsystemer, vi har ikke brug for kredsløb, der fungerer ved flere gigahertz, fordi enhederne ikke bevæger sig så hurtigt, " sagde han. "Vi ofrer lidt ydeevne for at opnå ekstrem strømeffektivitet. Selvom computeren kører ved 10 eller 100 megahertz, det vil være nok til vores målapplikationer."
De 65 nanometer CMOS-chips rummer begge former for læring, der er passende for en robot. Systemet kan programmeres til at følge modelbaserede algoritmer, og det kan lære af sine omgivelser ved hjælp af et forstærkningssystem, der tilskynder til bedre og bedre præstationer over tid - meget ligesom et barn, der lærer at gå ved at støde ind i ting.
"Du starter systemet med et forudbestemt sæt vægte i det neurale netværk, så robotten kan starte fra et godt sted og ikke styrte ned med det samme eller give fejlagtige oplysninger, " sagde Raychowdhury. "Når du installerer det på et nyt sted, miljøet vil have nogle strukturer, som det vil genkende og nogle, som systemet bliver nødt til at lære. Systemet vil derefter træffe beslutninger på egen hånd, og den vil måle effektiviteten af hver beslutning for at optimere dens bevægelse."
Kommunikation mellem robotterne giver dem mulighed for at samarbejde om at søge et mål.
"I et samarbejdsmiljø, robotten skal ikke kun forstå, hvad den laver, but also what others in the same group are doing, " he said. "They will be working to maximize the total reward of the group as opposed to the reward of the individual."
With their ISSCC demonstration providing a proof-of-concept, the team is continuing to optimize designs and is working on a system-on-chip to integrate the computation and control circuitry.
"We want to enable more and more functionality in these small robots, " Raychowdhury added. "We have shown what is possible, and what we have done will now need to be augmented by other innovations."
 Varme artikler
Varme artikler
-
 Ægte eller kunstigt? Tekniske titaner erklærer AI -etiske bekymringerI denne 5. januar, 2019, filfoto mennesker står foran Google -teltet under forberedelserne til CES International i Las Vegas. Google -medarbejdere har haft større succes end andre teknikere med at kræ
Ægte eller kunstigt? Tekniske titaner erklærer AI -etiske bekymringerI denne 5. januar, 2019, filfoto mennesker står foran Google -teltet under forberedelserne til CES International i Las Vegas. Google -medarbejdere har haft større succes end andre teknikere med at kræ -
 Endnu ingen aftale mellem USA, Kina på ZTE:Trump-hjælperWashington har forbudt salg af amerikanske komponenter til den kinesiske telekomgigant ZTE USA og Kina har endnu ikke indgået en aftale om den kinesiske telekomgigant ZTE, der vil ophæve lammende
Endnu ingen aftale mellem USA, Kina på ZTE:Trump-hjælperWashington har forbudt salg af amerikanske komponenter til den kinesiske telekomgigant ZTE USA og Kina har endnu ikke indgået en aftale om den kinesiske telekomgigant ZTE, der vil ophæve lammende -
 Twitter forbyder dehumaniserende kommentarer med brugerhjælpTwitter planlægger at udvide restriktionerne for hadefuldt indhold, der vil omfatte et forbud mod tweets, der dehumaniserer folk baseret på race, religion, seksuel orientering Twitter nåede tirsda
Twitter forbyder dehumaniserende kommentarer med brugerhjælpTwitter planlægger at udvide restriktionerne for hadefuldt indhold, der vil omfatte et forbud mod tweets, der dehumaniserer folk baseret på race, religion, seksuel orientering Twitter nåede tirsda -
 En skarpere definition af skalafri giver bedre indsigt i netværkKredit:CC0 Public Domain Et netværk kan være alt, hvor mennesker eller ting er forbundet med hinanden:lufthavne, mellem hvilke der finder ruteflyvninger sted, mennesker, der kan inficere hinanden
En skarpere definition af skalafri giver bedre indsigt i netværkKredit:CC0 Public Domain Et netværk kan være alt, hvor mennesker eller ting er forbundet med hinanden:lufthavne, mellem hvilke der finder ruteflyvninger sted, mennesker, der kan inficere hinanden
- Boa Constrictor Facts for Kids
- Sømme digitale forfalskninger med AI-lærte artefakter
- Global opvarmning på 1,5 C eller 2 C:Den nedre grænse ville reducere risikoen for oversvømmelser
- Forskere finder endelig superledelse på plads, som de har ledt efter i årtier
- Mygalarmen bryder muligvis dine menneskerettigheder
- Undersøgelser viser, at mennesker direkte påvirker vind og vejr over Nordatlanten