


Slothbot tager en afslappet tilgang til miljøovervågning
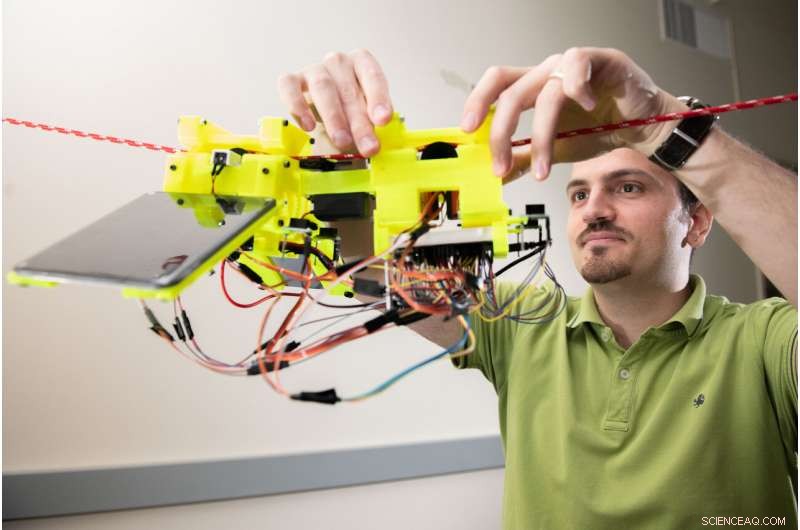
Graduate Research Assistant Gennaro Notomista viser komponenterne i SlothBot på et kabel i et Georgia Tech laboratorium. Robotten er designet til at være langsom og energieffektiv til applikationer som miljøovervågning. Kredit:Allison Carter, Georgia Tech
Til miljøovervågning, præcisionslandbrug, infrastrukturvedligeholdelse og visse sikkerhedsapplikationer, langsom og energieffektiv kan være bedre end hurtig og har altid brug for en genopladning. Det er her "SlothBot" kommer ind.
Drevet af et par solcellepaneler og designet til at blive hængende i skovens baldakin i flere måneder, SlothBot bevæger sig kun, når det er nødvendigt for at måle miljøændringer - såsom vejr og kemiske faktorer i miljøet - som kun kan observeres med en langsigtet tilstedeværelse. Den proof-of-concept hypereffektive robot, beskrevet 21. maj på den internationale konference om robotteknologi og automatisering (ICRA) i Montreal, kan snart hænge ud blandt trætopkabler i Atlanta Botaniske Have.
"I robotteknologi, det ser ud til, at vi altid presser på for hurtigere, mere adrætte og mere ekstreme robotter, sagde Magnus Egerstedt, Steve W. Chaddick skoleformand for School of Electrical and Computer Engineering ved Georgia Institute of Technology og hovedefterforsker for Slothbot. "Men der er mange applikationer, hvor der ikke er behov for at være hurtig. Du skal bare være ude vedholdende over lange perioder, observere, hvad der foregår."
Baseret på hvad Egerstedt kaldte "teorien om langsomhed, "Uddannet forskningsassistent Gennaro Notomista designede SlothBot sammen med sin kollega, Yousef Emam, ved hjælp af 3-D-printede dele til de gear- og wire-omskiftningsmekanismer, der er nødvendige for at kravle gennem et netværk af ledninger i træerne. Den største udfordring for en wire-crawling-robot er at skifte fra et kabel til et andet uden at falde, sagde Notomista.
"Udfordringen er at holde fast i en ledning, mens du griber en anden, " sagde han. "Det er en vanskelig manøvre, og du skal gøre det rigtigt for at give en fejlsikker overgang. Det er virkelig den største udfordring at sikre, at kontakterne fungerer godt over lange perioder."
Mekanisk, SlothBot består af to legemer forbundet med et aktiveret hængsel. Hver krop huser en drivmotor forbundet til en fælg, hvorpå et dæk er monteret. Brugen af hjul til bevægelse er enkel, energieffektiv og sikrere end andre typer trådbaseret bevægelse, siger forskerne.
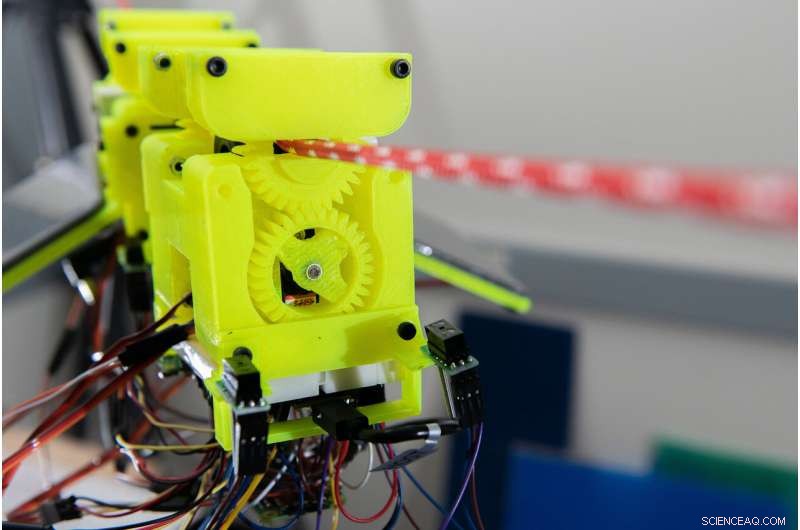
Billedet viser komponenter af SlothBot, som drives af to solcellepaneler. 3D-printede gear og kontakter hjælper robotten med at skifte fra et kabel til et andet. Kredit:Allison Carter, Georgia Tech
SlothBot har hidtil opereret i et netværk af kabler på Georgia Tech campus. Næste, en ny 3D-printet skal – der får robotten til at ligne mere et dovendyr – vil beskytte motorerne, gear, aktuatorer, kameraer, computer og andre komponenter fra regn og blæst. Det vil sætte scenen for længerevarende studier i trækronen i Atlanta Botaniske Have, hvor Egerstedt håber, at besøgende vil se en SlothBot-overvågningsforhold allerede til efteråret.
Navnet SlothBot er ikke en tilfældighed. Dovendyr fra det virkelige liv er små pattedyr, der lever i junglekroner i Syd- og Mellemamerika. At leve af at spise træblade, dyrene kan overleve på den daglige kalorieækvivalent af en lille kartoffel. Med deres langsomme stofskifte, dovendyr hviler så meget 22 timer i døgnet og stiger sjældent ned fra træerne, hvor de kan tilbringe hele deres liv.
"Et dovendyrs liv går ret langsomt, og der er ikke megen spænding på det daglige plan, " sagde Jonathan Pauli, en lektor i Department of Forest &Wildlife Ecology ved University of Wisconsin-Madison, som har rådført sig med Georgia Tech-teamet om projektet. "Det fine ved en meget langsom livshistorie er, at du ikke har brug for meget energitilførsel. Du kan have en lang varighed og vedholdenhed i et begrænset område med meget lidt energitilførsel over en længere periode."
Det er præcis, hvad forskerne forventer af SlothBot, hvis udvikling er blevet finansieret af U.S. Office of Naval Research.
"Der er meget, vi ikke ved om, hvad der rent faktisk sker under tætte trædækkede områder, " sagde Egerstedt. "Det meste af tiden vil SlothBot bare hænge derude, og nu og da vil den bevæge sig ind i et solrigt sted for at genoplade batteriet."
Forskerne håber også at teste SlothBot i en kakaoplantage i Costa Rica, der allerede er hjemsted for rigtige dovendyr. "Kablerne, der bruges til at flytte kakao, er blevet en dovendyrsmotorvej, fordi dyrene finder dem nyttige at flytte rundt på, Egerstedt sagde. Hvis alt går vel, vi vil installere SlothBots langs kablerne for at overvåge dovendyrene."

Jonathan Pauli ser på, hvordan et to-tået dovendyr bevæger sig ned ad et kabel ved en kakaoplantage i det nordøstlige Costa Rica. Pauli har samarbejdet med M. Zachariah Peery om at studere dovendyr i marken i et årti. Kredit:M. Zachariah Peery
Egerstedt er kendt for algoritmer, der driver sværme af små hjul eller flyvende robotter. Men under et besøg i Costa Rica, han blev interesseret i dovendyr og begyndte at udvikle, hvad han kalder "en teori om langsomhed" sammen med professor Ron Arkin fra Georgia Tech's School of Interactive Computing. Teorien udnytter fordelene ved energieffektivitet.
"Hvis du laver ting som miljøovervågning, du vil være ude i skoven i flere måneder, " sagde Egerstedt. "Det ændrer måden, man tænker på kontrolsystemer på et højt niveau."
Flyvende robotter bruges allerede til miljøovervågning, men deres høje energibehov betyder, at de ikke kan blive hængende længe. Robotter på hjul kan klare sig med mindre energi, men de kan sidde fast i mudder eller blive hæmmet af trærødder, og kan ikke få et stort billede fra jorden.
"Det, der koster energi mere end noget andet, er bevægelse, " sagde Egerstedt. "Det er meget dyrere at flytte end at sanse eller tænke. For miljørobotter, du skal kun flytte, når du absolut skal. Vi var nødt til at tænke over, hvordan det ville være."
For Pauli, der studerer en række dyreliv, Det har været glædeligt at arbejde sammen med Egerstedt for at hjælpe SlothBot til live.
"Det er fantastisk at se en robot inspireret af dovendyrens biologi, " sagde han. "Det har været sjovt at dele, hvordan dovendyr og andre organismer, der lever i disse økosystemer i lange perioder, lever deres liv. Det bliver interessant at se robotter spejle det, vi ser i naturlige økologiske samfund."
 Varme artikler
Varme artikler
-
 Fleksibel tænkning på silicium solcellerMuhammad Mustafa Hussain (til venstre) og Nazek El-Atab sammenligner deres solcelles fleksibilitet med den stive karakter af en typisk silicium solcelle. Kredit:KAUST Krystallinske silicium solpan
Fleksibel tænkning på silicium solcellerMuhammad Mustafa Hussain (til venstre) og Nazek El-Atab sammenligner deres solcelles fleksibilitet med den stive karakter af en typisk silicium solcelle. Kredit:KAUST Krystallinske silicium solpan -
 AI -teknologi adresserer nøjagtighed af dele, en stor fremstillingsudfordring inden for 3D-printDette billede illustrerer de faktiske forudsigelser af geometriske formafvigelser for 3-D lodrette halvcylindere, der genereres fra Purdue University maskinindlæringsteknologi. Kredit:Purdue Universit
AI -teknologi adresserer nøjagtighed af dele, en stor fremstillingsudfordring inden for 3D-printDette billede illustrerer de faktiske forudsigelser af geometriske formafvigelser for 3-D lodrette halvcylindere, der genereres fra Purdue University maskinindlæringsteknologi. Kredit:Purdue Universit -
 YouTube vil lægge endnu mere opmærksomhed på læring i 2020Kredit:CC0 Public Domain Nævn YouTube til en forælder, og du får flere tanker. I bedste fald, det er en babysitter og en pædagogisk ressource. Men det er også et websted, man skal være på vagt ov
YouTube vil lægge endnu mere opmærksomhed på læring i 2020Kredit:CC0 Public Domain Nævn YouTube til en forælder, og du får flere tanker. I bedste fald, det er en babysitter og en pædagogisk ressource. Men det er også et websted, man skal være på vagt ov -
 Facebook idømte Brasilien en bøde på 1,65 millioner dollarsFacebook engagerede sig i en misbrug ved at tillade data fra 443, 000 brugere i Brasilien for at være uretmæssigt tilgængelige, sagde landets justitsministerium Brasilien idømte mandag Facebook en
Facebook idømte Brasilien en bøde på 1,65 millioner dollarsFacebook engagerede sig i en misbrug ved at tillade data fra 443, 000 brugere i Brasilien for at være uretmæssigt tilgængelige, sagde landets justitsministerium Brasilien idømte mandag Facebook en
- Rusland:Rumstations lufttryk genoprettet efter lækage
- Top 5 miljøvenlige fødevarer
- Ultrasensitive sensorer fremstillet af bor-dopet grafen
- Grafencoating kan hjælpe med at forhindre brand i lithiumbatterier
- Effekter af vejrvariabilitet på ahornsirupproduktion undersøgt
- NOAA-satellitter hjalp med at redde 340 mennesker i 2018