


Overvågning af menneskelige fysiologiske reaktioner for at forbedre interaktioner med robotter
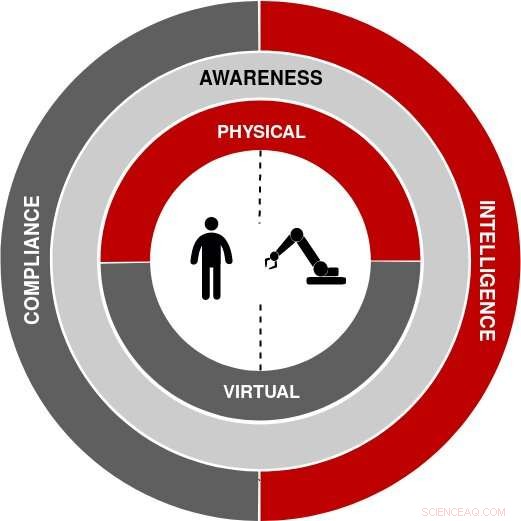
Et systemdiagram for de konceptuelle rammer for et menneskeligt robotsamarbejde som systemsystemer, der fremhæver de 3 aspekter af et HRC -system:Bevidsthed, Intelligens og overholdelse. Kredit:Savur, Kumar &Sahin.
Forskere fra Century Mold Collaborative Robotics Laboratory (CMCRL) ved Rochester Institute of Technology (RIT) i New York har for nylig udviklet en ny ramme for overvågning af menneskelige fysiologiske reaktioner, mens brugerne samarbejder med en robot for at fuldføre en opgave. Under tilsyn af prof. Ferat Sahin, direktør for Multi Agent Bio-Robotics Laboratory, CMCRL -forskere arbejder på at udvikle systemer, rammer og softwareværktøjer til at studere menneske-robot-samarbejde i industrielle omgivelser. Deres nye tilgang, skitseret i et papir, der på forhånd er offentliggjort på arXiv og skal præsenteres på IEEE Systems, Man &Cybernetics konference i Bari (Italien), muliggør kontinuerlig indsamling af fysiologiske data under menneske-robot-interaktioner, mens du ændrer en robots bevægelser for at udløse et svar hos det menneske, som det interagerer med.
Mange eksperter mener, at snart mennesker og maskiner vil arbejde sammen på en række forskellige områder, herunder industri og fremstilling. For at muliggøre effektiv automatisering og samarbejde mellem mennesker og robotter, imidlertid, forskere bliver nødt til at udvikle tilgange, der udnytter menneskelige færdigheder såsom beslutningstagning, fingerfærdighed, fleksibilitet og kreativitet, kombinerer disse med hastigheden, nøjagtighed og kraft forbundet med robotter.
Faktisk, mens komplet automatisering ville være meget dyrt, fremstilling, der udføres manuelt af mennesker alene, er ofte langsom og tilbøjelig til fejl. Derfor er det vigtigt at udvikle værktøjer, der forbedrer samarbejde mellem mennesker og robotter. Ifølge RIA, dette vil være en central del af den femte industrielle revolution, også kendt som Industry 5.0.
"Efter vores mening er der tre hovedudfordringer for samarbejde mellem mennesker og robotter i industrien. De er sikkerhed, menneskelig tillid til automatisering og produktivitet, "Shitij Kumar, en af forskerne, der gennemførte undersøgelsen, fortalte TechXplore. "Alle disse er afhængige af hinanden. For at løse disse udfordringer, Vi udviklede først et menneske-robot samarbejde (HRC) setup som et system af systemer, der ville give os mulighed for at oprette forskellige mennesker-robot samarbejde scenarier og forstå og analysere menneske-robot interaktioner. "
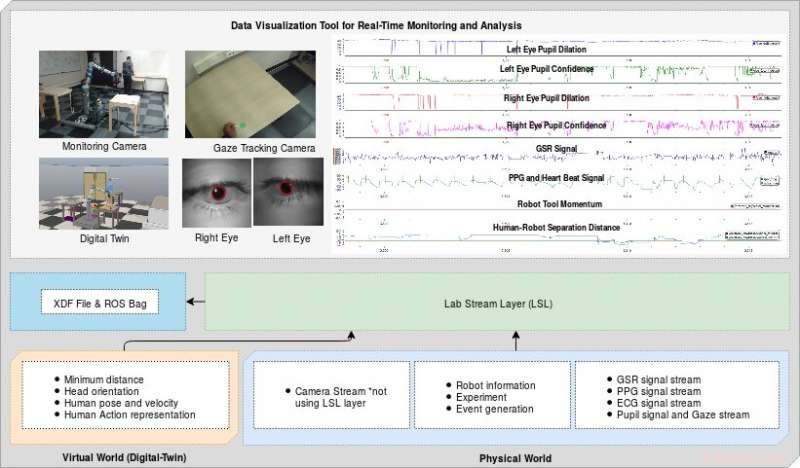
Et systemdiagram over implementeringen baseret på den foreslåede ramme, der repræsenterer dataindsamling og overvågning under et HRC -eksperiment. Kredit:Savur, Kumar &Sahin.
Som en del af sin ph.d. under vejledning af Dr. Ferat Sahin, direktør for CMCRL, Kumar begyndte at udvikle et system, der ændrer robotadfærd baseret på afstand mellem mennesker og robotter og handlinger i det delte arbejdsområde. I denne sammenhæng, en robots adfærd er deterministisk og forudsigelig baseret på regler.
På trods af det løfte, han viste, han fandt ud af, at menneskelig feedback ikke altid forekom, hvilket gjorde det sværere for sit system at opnå tilfredsstillende robotoverholdelse. Robotoverholdelse betyder i det væsentlige, at robotten kan styre forventningerne til mennesker, den interagerer med og effektivt kommunikere med dem.
"Vi troede på, at en bedre overensstemmelse med systemet, der giver operatøren, der arbejder med robotten, en følelse af kontrol og forudsigelighed for robotadfærd ville øge hans/hendes tillid til automatisering, "og derved øge opgavens produktivitet, "Sagde Kumar." Dog, så begyndte vi at spekulere på, hvordan kvantificerer du 'tillid' eller komfortniveau for en menneskelig operatør, der arbejder med robotten? "
Kumar og hans kolleger mener, at overvågning af menneskelige fysiologiske signaler, som er indikatorer for mental og fysisk stress, såvel som andre følelser, under en opgave, der involverer menneske-robot-interaktion, ville være et skridt i den rigtige retning. Denne overbevisning understøttes af tidligere forskning, der fandt ud af, at sådanne signaler (kendt som psykofysiologiske reaktioner) er pålidelige indikatorer for ændring af robotadfærd og bevægelse.

Sensorer og enheder, der bruges i prototypeimplementeringen. Forskerne brugte et motion capture -system til at overvåge menneskelig bevægelse og et kamera til at optage eksperimentet. De sporede også menneskeligt blik ved hjælp af Pupil Labs og menneskelige fysiologiske reaktioner såsom elevudvidelse, PPG, GSR, EEG \ &EKG registreret. Kredit:Savur, Kumar &Sahin.
Med det i tankerne, Celal Savur, en ph.d. Student på RIT's CMCRL, udført en undersøgelse for at undersøge virkningerne af robotens bevægelse og adfærd på menneskelige psykofysiologiske reaktioner. Hovedmålet med hans undersøgelse var at forstå, hvilke ændringer i en robots bevægelse resulterer i 'menneskeligt ubehag' reaktioner som frygt eller stress.
"For at gøre dette, en ramme for et system, der repræsenterer og registrerer robotens bevægelse og menneskelige fysiologiske tilstand samtidigt, var nødvendig, "Forklarede Savur." Når forholdet mellem robotbevægelsen og den menneskelige fysiologiske tilstand er identificeret, den menneskelige fysiologiske reaktion kan bruges som en feedback til direkte at kontrollere/opdatere robotens bevægelse/adfærd. Sådanne systemer kaldes 'fysiologiske computersystemer. "Fysiologisk computing er et undergruppe af affektiv computing, der ofte bruges i computerspil, hvor spillene i realtid tilpasser sig spillernes svar, for at opnå en mere interaktiv spiloplevelse. "
I deres undersøgelse, Savur og Kumar satte sig for at udvikle en ramme, der kan overvåge menneskelige psykofysiologiske reaktioner, når brugerne udfører opgaver, der involverer menneske-robot samarbejde. Deres arbejde ligger i skæringspunktet mellem datalogi, robotik og psykofysiologi, en gren af neurovidenskaben, der søger at forstå, hvordan en persons mentale tilstand og hans/hendes fysiologiske reaktioner interagerer eller påvirker hinanden.
De rammer, de udviklede, falder ind under kategorien 'fysiologisk computing.' Dette er en type affektiv computing, der inkorporerer realtids softwaretilpasning til brugerens psykofysiologiske aktivitet. de foreslåede rammer kan bruges til at undersøge, hvordan ændringer i robotbevægelsen (f.eks. hastighed og bane) påvirker den menneskelige operatør i et industrielt miljø.
"Lad os overveje, for eksempel, at der er to operatører, der arbejder med en robot, operatør A og B, "Forklarede Kumar." Operatør A har arbejdet længere og er behagelig at arbejde med robotten, da han/hun kan forudsige robotadfærden ud fra erfaring. Operatør B er ny og er lidt skeptisk over for robotbevægelsen. Robotens adfærd ændrer sig med hensyn til den hastighed, hvormed den bevæger sig, og hvor meget afstand den holder, når den er i nærheden af operatøren baseret på operatørens fysiologiske tilstand og adfærdsmønstre. I dette scenario, for en bedre menneske-robot-interaktion, robotten kan bevæge sig ved højere hastigheder, der arbejder i nærheden af operatør A, og bevæge sig langsomt med at arbejde med operatør B. Efterhånden som operatør B får mere erfaring, robotbevægelsen kan tilpasse sig den, derved opbygge tillid og påvirke den samlede produktivitet positivt. "
Undersøgelsen udført af forskerne i CMCRL havde to hovedmål. Den første var at generere en database over menneskelige-robot-samarbejdsopgaver, registrering af menneske-robot-interaktioner. De ville derefter bruge denne database til at undersøge, hvordan menneskelige fysiologiske reaktioner kan bruges til at påvirke en robots bevægelse, har en positiv indvirkning på automatiseringsprocessen. Med andre ord, deres mål var at bygge et fysiologisk computersystem til samarbejde mellem mennesker og robotter i industri- og produktionsmiljøer.
"Vores rammer er i det væsentlige et system, der repræsenterer og registrerer robotens bevægelse og menneskelige fysiologiske tilstand samtidigt, "Sagde Kumar." For at registrere disse oplysninger, rammen giver grænseflader til robotten, sensorer såsom kameraer, motion capture system og også til de biologiske/biometriske dataopsamlingsenheder. Da alle disse enheder arbejder med forskellige samplingshastigheder, denne ramme hjælper med synkron dataindsamling og repræsentation af menneske-robot-samarbejdet. "
I traditionelle sociale robotiske eksperimentelle opsætninger, mennesker bliver stillet spørgsmål om deres oplevelser og opfattelser under eller efter et eksperiment. Ved hjælp af deres feedback, forskere er derefter i stand til at analysere og kvantificere de subjektive data, der blev indsamlet under eksperimentet.
"Metoder, der afbryder emner eller får emnet til at huske deres oplevelse, imidlertid, ikke altid er i stand til at bevare eksperimentets integritet eller nøjagtigt repræsentere de subjektive data, "Forklarede Kumar." Derfor, i modsætning til traditionelle metoder, denne implementering af rammen gør det muligt for det menneskelige subjekt eller hovedforsker at generere hændelsesmarkører, mens eksperimentet / opgaven med human robot -samarbejde (HRC) udføres. "
Deres rammer kan automatisk generere hændelsesmarkører baseret på repræsentationen mellem mennesker og robotter i en virtuel verden, som er kendt som en digital tvilling. For eksempel, det kan hjælpe med at identificere, hvornår robotten og mennesket var tættest på hinanden under opgaven, når robotten skulle stoppe eller blev afbrudt af en menneskelig handling, fremskridt i opgaven udført af mennesket, begivenheder baseret på kommandoer eller kontrol fra den menneskelige operatør, en hændelse, hvor robotten arbejdede med maksimal hastighed, og begyndelsen/slutningen på en opgave.
"Vores ramme giver også en brugergrænseflade for forskerne til at afspille og visualisere deres HRC -eksperimenter, "Sagde Kumar." Desuden, det giver dem mulighed for at analysere og mærke de indsamlede data. Den kontinuerlige og synkrone indsamling af fysiologiske data fra forskellige enheder og grænseflader sammen med robotstyring og grænseflade i et enkelt økosystem, tillader en fuldstændig repræsentation af menneskelig og robot tilstand. Dette kan hjælpe med at forstå årsagen og virkningen mellem den menneskelige fysiologiske tilstand og robotens bevægelser. "
Med fremkomsten af bærbare enheder og tingenes internet (IoT), menneskelige fysiologiske data vil blive lettere at indsamle og dermed være let tilgængelige. De rammer udviklet af forskningen kan således vise sig at være yderst værdifulde, som det er designet til at udnytte disse data til at forbedre menneske-robot-interaktioner.
"Denne ramme muliggør en kontinuerlig dataregistrering med indbygget hændelsesgenerering og signalsynkronisering over distribuerede systemer kan opretholde eksperimentets integritet (genskabe scenariet for en opgave i industrielle omgivelser) og nøjagtigt repræsentere de subjektive data, "Sagde Kumar.
Kumar og hans kolleger mener, at en agent, der er i stand til sådan fysiologisk beregning (dvs. som kan detektere menneskelige fysiologiske reaktioner og reagere på disse) kan resultere i et lukket menneske-i-sløjfe-system, hvor både menneskelige brugere og robotter i et HRC -setup overvåges, og der deles oplysninger mellem dem. Dette kan resultere i bedre kommunikation, hvilket i sidste ende kan skabe større tillid til automatisering blandt offentligheden, samtidig med at produktiviteten øges. I fremtiden, forskerne planlægger at gøre databaserne genereret i deres undersøgelse tilgængelige for andre HRI -forskere.
"Vores næste undersøgelser vil fokusere på at udvikle en komplet brugergrænseflade -applikation af det fysiologiske computersystem til behandling af optagelsessignaler, udtrækning af oplysninger og anvendelse af maskinlæringsalgoritme til at give feedback til robotten, "Kumar sagde." Det endelige mål med dette arbejde er at generere en database, der kan bruges til at fremme forståelsen af, hvordan menneskelige fysiologiske reaktioner kan udledes for at resultere i adaptiv robotbevægelsesadfærd. "
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Med hans ord:Huaweis CEO siger, at virksomheden ikke vil blive knustHuaweis grundlægger Ren Zhengfei, taler under et interview på Huawei-campus i Shenzhen i det sydlige Kinas Guangdong-provins tirsdag, 20. august, 2019. Ren sagde, at han ikke forventer nogen lettelse
Med hans ord:Huaweis CEO siger, at virksomheden ikke vil blive knustHuaweis grundlægger Ren Zhengfei, taler under et interview på Huawei-campus i Shenzhen i det sydlige Kinas Guangdong-provins tirsdag, 20. august, 2019. Ren sagde, at han ikke forventer nogen lettelse -
 Udviklingen af en hybrid mikromixer til biologiske og kemiske eksperimenterKomponenter i blandesystemet (skaleret). Alle mål er i mm. Kredit:Majid Warkiani Et internationalt hold af videnskabsmænd, herunder en medarbejder fra I.M. Sechenov First Moscow State Medical Univ
Udviklingen af en hybrid mikromixer til biologiske og kemiske eksperimenterKomponenter i blandesystemet (skaleret). Alle mål er i mm. Kredit:Majid Warkiani Et internationalt hold af videnskabsmænd, herunder en medarbejder fra I.M. Sechenov First Moscow State Medical Univ -
 Systemet sørger for køling uden elektricitetPå billedet til venstre, en skive af det nye isoleringsmateriale blokerer og reflekterer synligt lys, skjuler MIT -logoet under det. Men set i infrarødt lys, til højre, materialet er gennemsigtigt og
Systemet sørger for køling uden elektricitetPå billedet til venstre, en skive af det nye isoleringsmateriale blokerer og reflekterer synligt lys, skjuler MIT -logoet under det. Men set i infrarødt lys, til højre, materialet er gennemsigtigt og -
 Google Pixel 3 -telefon har til formål at automatisere flere daglige opgaverI denne tirsdag, 9. okt. 2018, filfoto Nye Google Pixel 3 -smartphones vises i New York. Googles nye Pixel 3-telefon spiller ind på hardwaren med Apple og Samsung. Det er virkelig designet til at vise
Google Pixel 3 -telefon har til formål at automatisere flere daglige opgaverI denne tirsdag, 9. okt. 2018, filfoto Nye Google Pixel 3 -smartphones vises i New York. Googles nye Pixel 3-telefon spiller ind på hardwaren med Apple og Samsung. Det er virkelig designet til at vise
- OSIRIS-REx tager sit første billede af Jupiter
- 86 procent af internetbrugerne indrømmer, at de er blevet narret af falske nyheder:undersøgelse
- Oprettelse af supermennesker gennem genmanipulation og mere
- 4-D-print, vendbare formændrende materialer med lysbaseret gråtonemønster
- Hvad er drømme?
- Laseraktiverede silkeforseglingsmidler overgår suturer til vævsreparation