


En ny tilgang til at forbedre robotnavigation i indendørs miljøer
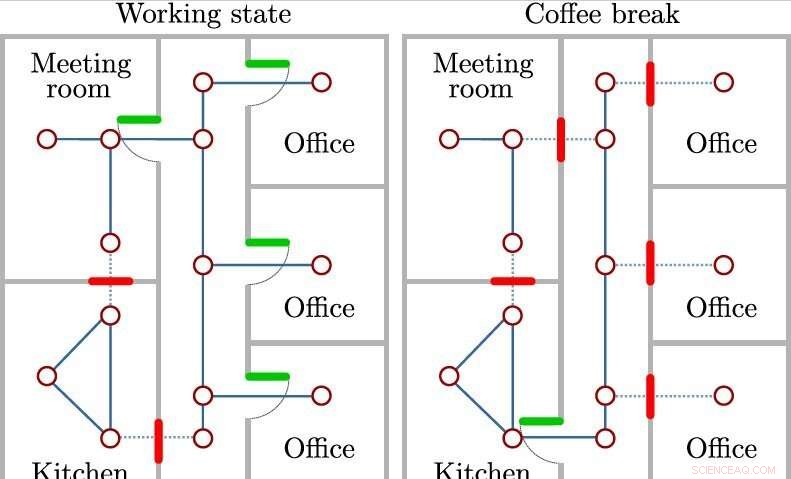
Et simpelt eksempel på gentagne konfigurationer på et kontor. Kredit:Nardi &Stachniss.
For effektivt at navigere i deres omgivelser, robotter planlægger typisk stier baseret på foruddesignede kort over det miljø, de opererer i, og observationer indsamlet af deres sensorer. Selvom denne type navigationsstrategi kan være nyttig i enkle og statiske miljøer, det er langt fra ideelt i mere komplekse og uforudsigelige, som dem, der findes i den virkelige verden.
Faktisk, selvom kort, der er indført til en robot, er blevet omhyggeligt kompileret og er nøjagtige, de tager ikke højde for uventede forhindringer eller ændringer i miljøet. Som de fleste miljøer, hvor robotter i sidste ende bør indsættes (f.eks. hospitaler, indkøbscentre, lufthavne, osv.) er meget uforudsigelige og ændrer sig hurtigt, navigationsmetoder, der hovedsageligt er afhængige af foruddesignede kort, kan resultere i dårlige baner og navigationsstrategier.
Er klar over dette problem, to forskere ved universitetet i Bonn har for nylig udviklet en tilgang, der kan give robotter mulighed for at navigere i hurtigt skiftende indendørsmiljøer mere effektivt over længere perioder. Denne nye tilgang, præsenteret i et papir, der er forududgivet på arXiv, fungerer i det væsentlige ved at fange gentagne mønstre i, hvordan et miljø ændrer sig, og udnytte denne viden til at træffe informerede navigationsbeslutninger.
"Idéen med denne undersøgelse er, at mange ændringer i indendørs miljøer sker efter gentagne rumlige mønstre, for eksempel døre, der åbner og lukker på samme tid, " Lorenzo Nardi, en af de forskere, der har udført undersøgelsen, fortalte TechXplore . "Robotter, der er installeret i længere perioder i disse miljøer, kan observere og løbende indsamle information om det og udnytte denne viden til at planlægge bedre strategier for navigation."
I en tidligere undersøgelse, det samme team af forskere udviklede en tilgang, der indsamler information om, hvordan et terræn påvirker en robots navigation udendørs og derefter bruger den til at beregne baner, der minimerer vibrationer ombord og strømforbrug. I deres nye undersøgelse, de besluttede at fokusere på robotnavigation indendørs, ved at forudsige de forskellige konfigurationer, som et miljø antager over tid.
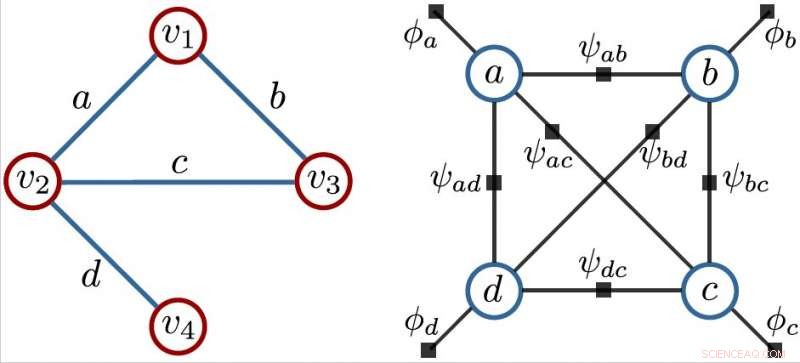
Et eksempel på topologi (til venstre) og den probabilistiske grafiske model, som forskerne brugte i deres arbejde (højre). Kredit:Nardi &Stachniss.
Den tilgang, de udviklede, er designet til at forbedre en robots indendørs navigation ved at modellere mønstre af dynamiske miljøændringer og udnytte denne information til at planlægge stier for robotten. Ved at bruge deres tilgang, en robot støder således på færre forhindringer og blokerede passager langs sin vej til et givet sted.
"Den største fordel ved vores tilgang er, at den betragter en miljørepræsentation, der kontinuerligt er i stand til at integrere nye observationer om miljøet, " Nardi forklarede. "Denne repræsentation giver mulighed for planlægning af bedre baner over tid end grådige korteste vejplanlæggere baseret på statiske geometriske kort over miljøet."
Forskerne evaluerede deres tilgang ved at anvende den på en række scenarier i fire forskellige indendørsmiljøer:et lille kontor, et mellemstort kontor, et stort kontor og et hospital. I disse forsøg, deres tilgang fungerede bemærkelsesværdigt godt, planlægning af effektive veje, der tog hensyn til miljøændringer. Ud over, de sammenlignede deres tilgang med eksisterende teknikker baseret på statiske kort og fandt ud af, at det genererer kortere og bedre veje, når robotten er indsat i længere perioder.
"Vores resultater viser, at selvom kompleksiteten af navigationssystemet øges, vores tilgang leder robotten til over tid at give nøjagtige forudsigelser om miljøkonfigurationer og udnytte denne viden til at navigere ad kortere veje, " sagde Nardi.
I fremtiden, tilgangen foreslået af Nardi og hans kollega Cyrill Stachniss kunne hjælpe med at forbedre robotnavigation i hurtigt skiftende indendørsmiljøer. Det kan vise sig at være særligt nyttigt i indstillinger, hvor en robots effektivitet er kritisk, såsom hospitaler. Forskerne planlægger nu at teste deres tilgang ved hjælp af en egentlig robotplatform, da dette i sidste ende vil give dem mulighed for at vurdere, om de indledende resultater, de indsamlede, stadig holder i virkelige omgivelser.
"En anden interessant retning for fremtidig forskning kunne være at forsøge at integrere højfrekvent dynamisk adfærd, såsom andre bevægelige dynamiske agenter, ind i rammerne, " sagde Nardi.
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Amerikanske luftfartsselskaber søger milliarder i bistand, da udbrud ødelægger rejserI denne 13. april, 2018 filfoto, et Delta Air Lines-fly letter over et taxerende Alaska Airlines-fly i Seattle-Tacoma International Airport i Seattle. Amerikanske flyselskaber beder den føderale reger
Amerikanske luftfartsselskaber søger milliarder i bistand, da udbrud ødelægger rejserI denne 13. april, 2018 filfoto, et Delta Air Lines-fly letter over et taxerende Alaska Airlines-fly i Seattle-Tacoma International Airport i Seattle. Amerikanske flyselskaber beder den føderale reger -
 Privatlivets risici ved at udarbejde mobilitetsdataMIT -forskere finder, at den voksende praksis med at sammensætte massive datasæt om folks bevægelsesmønstre til byplanlægnings- og udviklingsforskning kan, faktisk, sætte folks private data i fare - s
Privatlivets risici ved at udarbejde mobilitetsdataMIT -forskere finder, at den voksende praksis med at sammensætte massive datasæt om folks bevægelsesmønstre til byplanlægnings- og udviklingsforskning kan, faktisk, sætte folks private data i fare - s -
 Team finder fejl, der kan påvirke mere end 100 videnskabelige undersøgelserFra venstre, Jayanti Bhandari Neupane, Ram P. Neupane, Yuheng Luo, Wesley Y. Yoshida, Philip G. Williams og Rui Sun. Kredit:University of Hawaii at Manoa Et hold forskere ved University of Hawaii
Team finder fejl, der kan påvirke mere end 100 videnskabelige undersøgelserFra venstre, Jayanti Bhandari Neupane, Ram P. Neupane, Yuheng Luo, Wesley Y. Yoshida, Philip G. Williams og Rui Sun. Kredit:University of Hawaii at Manoa Et hold forskere ved University of Hawaii -
 Holistisk syn på planlægning af selvforsynende energisamfundForskere bruger avancerede modellerings- og visualiseringsværktøjer til at hjælpe med at skabe det planlagte net-nulenergidistrikt, Peña Station NÆSTE, nær Denver International Airport i Denver, Color
Holistisk syn på planlægning af selvforsynende energisamfundForskere bruger avancerede modellerings- og visualiseringsværktøjer til at hjælpe med at skabe det planlagte net-nulenergidistrikt, Peña Station NÆSTE, nær Denver International Airport i Denver, Color
- Undersøgelse sår tvivl om opvarmningsimplikationer af brun kulstofaerosol fra skovbrande
- Opdagelse af afgiftningsenzym kunne bruges til at målrette mod større afgrødeforurenende stoffer
- Bryde kæden - katalysere en grøn fremtid for kemi
- Formål med Cell Lysis Solution
- Ledende nanofiber netværk til fleksible, ubrydeligt, og gennemsigtige elektroder
- Nyt potentiale for sporing af alvorlige storme