


Assembler robotter laver store strukturer af små stykker
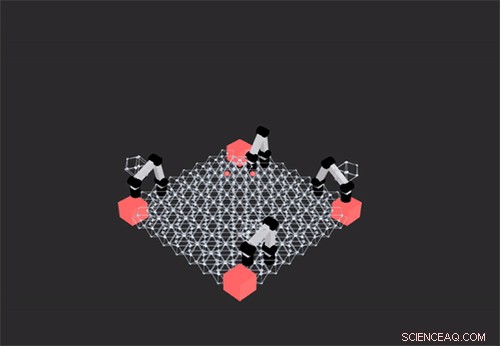
Computersimulering viser en gruppe på fire samlerobotter, der arbejder på at bygge en tredimensionel struktur. Hele sværme af sådanne robotter kunne slippes løs for at skabe store strukturer såsom flyvinger eller rumhabitater. Kredit:Massachusetts Institute of Technology
Nutidens kommercielle fly er typisk fremstillet i sektioner, ofte på forskellige steder - vinger på én fabrik, skrogsektioner ved en anden, halekomponenter et andet sted – og derefter fløjet til et centralt anlæg i enorme fragtfly til slutmontering.
Men hvad nu hvis den endelige forsamling var den eneste forsamling, med hele flyet bygget ud af et stort udvalg af små identiske stykker, alt sammen sat sammen af en hær af små robotter?
Det er den vision, som kandidatstuderende Benjamin Jenett, arbejder med professor Neil Gershenfeld i MIT's Center for Bits and Atoms (CBA), har forfulgt som sit doktorafhandlingsarbejde. Det er nu nået til det punkt, at prototypeversioner af sådanne robotter kan samle små strukturer og endda arbejde sammen som et team for at opbygge en større samling.
Det nye værk vises i oktoberudgaven af IEEE Robotics and Automation Letters, i en avis af Jenett, Gershenfeld, medstuderende Amira Abdel-Rahman, og CBA-alumne Kenneth Cheung SM '07, Ph.D. '12, som nu er på NASAs Ames Research Center, hvor han leder ARMADAS-projektet for at designe en månebase, der kunne bygges med robotsamling.
"Dette papir er en godbid, " siger Aaron Becker, en lektor i elektro- og computerteknik ved University of Houston, som ikke var tilknyttet dette arbejde. "Det kombinerer førsteklasses mekanisk design med imponerende demonstrationer, ny robothardware, og en simuleringssuite med over 100, 000 elementer, " han siger.
Kredit:Massachusetts Institute of Technology
"Det, der er kernen i dette, er en ny form for robotteknologi, som vi kalder relative robotter, " siger Gershenfeld. Historisk set, han forklarer, der har været to brede kategorier af robotter – en lavet af dyre brugerdefinerede komponenter, der er omhyggeligt optimeret til bestemte applikationer, såsom fabriksmontering, og dem lavet af billige masseproducerede moduler med meget lavere ydeevne. De nye robotter, imidlertid, er et alternativ til begge dele. De er meget enklere end de tidligere, mens meget mere dygtig end sidstnævnte, og de har potentialet til at revolutionere produktionen af store systemer, fra fly til broer til hele bygninger.
Ifølge Gershenfeld, den vigtigste forskel ligger i forholdet mellem robotenheden og de materialer, den håndterer og manipulerer. Med disse nye slags robotter, "Du kan ikke adskille robotten fra strukturen - de arbejder sammen som et system, " siger han. F.eks. mens de fleste mobile robotter kræver meget præcise navigationssystemer for at holde styr på deres position, de nye samlerobotter skal kun holde styr på, hvor de er i forhold til de små underenheder, kaldet voxels, som de arbejder på i øjeblikket. Hver gang robotten tager et skridt ind på den næste voxel, den justerer sin positionssans, altid i forhold til de specifikke komponenter, som den står på i øjeblikket.
Den underliggende vision er, at ligesom de mest komplekse billeder kan gengives ved at bruge en række pixels på en skærm, stort set ethvert fysisk objekt kan genskabes som en række mindre tredimensionelle stykker, eller voxels, som i sig selv kan bestå af simple stivere og noder. Teamet har vist, at disse enkle komponenter kan arrangeres til at fordele belastninger effektivt; de består i vid udstrækning af åbent rum, så den samlede vægt af strukturen minimeres. Enhederne kan samles op og placeres ved siden af hinanden af de simple samlere, og derefter fastgjort sammen ved hjælp af låsesystemer indbygget i hver voxel.
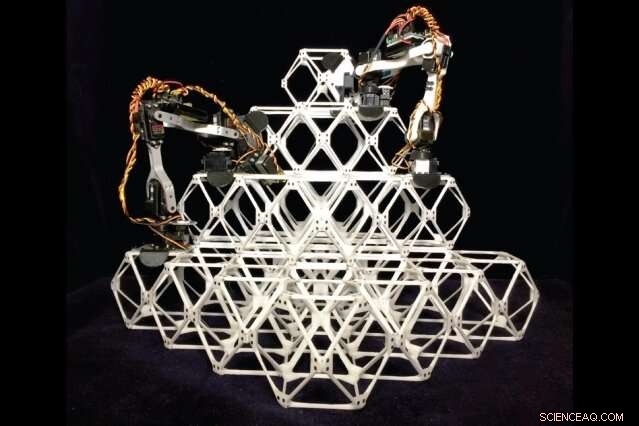
Billedet viser to prototype assembler-robotter i arbejde, der sammensætter en række små enheder, kendt som voxels, ind i en større struktur. Kredit:Benjamin Jenett
Robotterne selv ligner en lille arm, med to lange segmenter, der er hængslet i midten, og indretninger til fastspænding på voxelstrukturerne i hver ende. De simple enheder bevæger sig rundt som tommeorme, fremad langs en række af voxels ved gentagne gange at åbne og lukke deres V-formede kroppe for at flytte fra den ene til den næste. Jenett har døbt de små robotter BILL-E (et nik til filmrobotten WALL-E), som står for Bipedal Isotropic Lattice Locomoting Explorer.
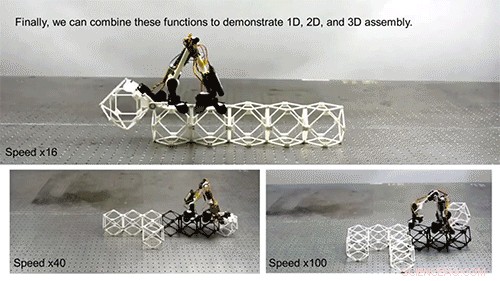
Jenett har bygget flere versioner af assemblers som proof-of-concept designs, sammen med tilsvarende voxel-designs med låsemekanismer til nemt at fastgøre eller afmontere hver enkelt fra naboerne. Han har brugt disse prototyper til at demonstrere samlingen af blokkene til lineære, todimensionelle, og tredimensionelle strukturer. "Vi lægger ikke præcisionen i robotten; præcisionen kommer fra strukturen", efterhånden som den gradvist tager form, siger Jenett. "Det er anderledes end alle andre robotter. Den skal bare vide, hvor dens næste skridt er."
Mens det arbejder med at samle stykkerne, hver af de små robotter kan tælle sine skridt over strukturen, siger Gershenfeld, hvem er direktør for CBA. Sammen med navigation, dette lader robotterne rette fejl ved hvert trin, eliminerer det meste af kompleksiteten ved typiske robotsystemer, han siger. "Den mangler de fleste af de sædvanlige kontrolsystemer, men så længe den ikke går glip af et trin, den ved, hvor den er." Til praktiske monteringsapplikationer, sværme af sådanne enheder kunne arbejde sammen for at fremskynde processen, takket være kontrolsoftware udviklet af Abdel-Rahman, der kan give robotterne mulighed for at koordinere deres arbejde og undgå at komme i vejen for hinanden.
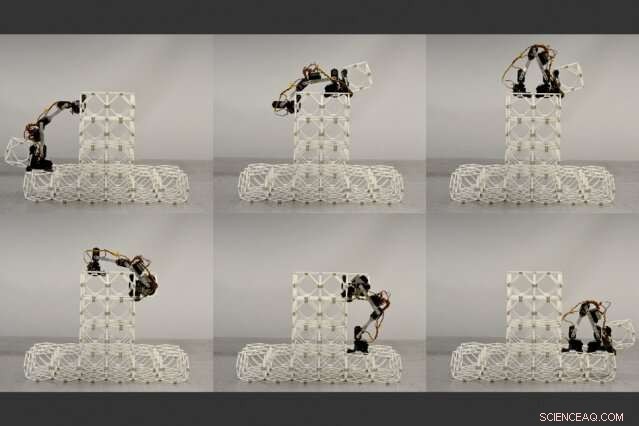
Sekvens af billeder viser en samlerobot på arbejde, at bære en strukturel enhed over toppen og ned ad den anden side af en struktur under opførelse. Kredit:Benjamin Jenett
Denne form for samling af store strukturer fra identiske underenheder ved hjælp af et simpelt robotsystem, meget som et barn, der samler et stort slot af LEGO klodser, har allerede tiltrukket sig interesse fra nogle store potentielle brugere, inklusive NASA, MIT's samarbejdspartner i denne forskning, og det europæiske rumfartsselskab Airbus SE, som også var med til at sponsorere undersøgelsen.
En fordel ved en sådan samling er, at reparationer og vedligeholdelse let kan håndteres ved den samme slags robotproces som den indledende montage. Beskadigede sektioner kan skilles ad fra strukturen og erstattes med nye, producerer en struktur, der er lige så robust som originalen. "At bygge op er lige så vigtigt som at bygge, " siger Gershenfeld, og denne proces kan også bruges til at foretage ændringer eller forbedringer af systemet over tid.
"For en rumstation eller et månehabitat, disse robotter ville leve på strukturen, løbende vedligeholde og reparere det, " siger Jenett.
Ultimativt, sådanne systemer kan bruges til at bygge hele bygninger, især i vanskelige miljøer som i rummet, eller på månen eller Mars, siger Gershenfeld. Dette kunne eliminere behovet for at sende store formonterede strukturer hele vejen fra Jorden. I stedet kunne det være muligt at sende store partier af de bittesmå underenheder - eller danne dem af lokale materialer ved hjælp af systemer, der kunne skrue disse underenheder ud på deres endelige destinationspunkt. "Hvis du kan lave en jumbojet, du kan lave en bygning, " siger Gershenfeld.
Sandor Fekete, direktør for Institute of Operating Systems and Computer Networks ved det tekniske universitet i Braunschweig, i Tyskland, som ikke var involveret i dette arbejde, siger "Ultralight, digitale materialer som [disse] åbner fantastiske perspektiver til at konstruere effektive, kompleks, store strukturer, som er af vital betydning i rumfartsapplikationer."
Men at samle sådanne systemer er en udfordring, siger Fekete, som planlægger at indgå i forskerholdet for videreudvikling af kontrolsystemerne. "Det er her brugen af små og simple robotter lover at give det næste gennembrud:Robotter bliver ikke trætte eller kede sig, og at bruge mange miniaturerobotter virker som den eneste måde at få dette kritiske arbejde gjort. Dette ekstremt originale og smarte værk af Ben Jennet og samarbejdspartnere tager et kæmpe spring mod konstruktionen af dynamisk justerbare flyvinger, enorme solsejl eller endda rekonfigurerbare rumhabitater."
I processen, Gershenfeld siger, "vi føler, at vi er ved at afdække et nyt felt af hybride materiale-robotsystemer."
Denne historie er genudgivet med tilladelse fra MIT News (web.mit.edu/newsoffice/), et populært websted, der dækker nyheder om MIT-forskning, innovation og undervisning.
 Varme artikler
Varme artikler
-
 Samsung arbejder på bærbar computer med foldbar skærmKredit:CC0 Public Domain Laptops med foldeskærme? Sig aldrig aldrig, når visionærerne hos Samsung bliver begejstrede langt ud over ord, såsom At logge af, ses i morgen. Song Su-hyun rapporterede
Samsung arbejder på bærbar computer med foldbar skærmKredit:CC0 Public Domain Laptops med foldeskærme? Sig aldrig aldrig, når visionærerne hos Samsung bliver begejstrede langt ud over ord, såsom At logge af, ses i morgen. Song Su-hyun rapporterede -
 Optisk scanningsteknologi, der bruges til at gendanne voksoptagelser af oprindelige sprogEn af cylindrene fra samlingen. Et typisk eksempel med hensyn til størrelse og farve. Riller er synlige, og de små hvide pletter er skader fra skimmelsvamp. Kredit:University of California Et team
Optisk scanningsteknologi, der bruges til at gendanne voksoptagelser af oprindelige sprogEn af cylindrene fra samlingen. Et typisk eksempel med hensyn til størrelse og farve. Riller er synlige, og de små hvide pletter er skader fra skimmelsvamp. Kredit:University of California Et team -
 Amazon taler for at regulere ansigtsgenkendelsesteknologiAmazon har sluttet sig til rækken af andre teknologivirksomheder, inklusive Microsoft og Google, ved at anerkende risiciene ved ansigtsgenkendelsessoftware og opfordre den føderale regering til at i
Amazon taler for at regulere ansigtsgenkendelsesteknologiAmazon har sluttet sig til rækken af andre teknologivirksomheder, inklusive Microsoft og Google, ved at anerkende risiciene ved ansigtsgenkendelsessoftware og opfordre den føderale regering til at i -
 Nyhedsmedier lobbyer Merkel, Macron om ophavsretsreformenEuropæiske nyhedsmedieforeninger skrev til den franske præsident Emmanuel Macron (L, afbilledet 22. januar, 2019) og Tysklands kansler Angela Merkel, at sige, at en manglende aftale ville bringe hele
Nyhedsmedier lobbyer Merkel, Macron om ophavsretsreformenEuropæiske nyhedsmedieforeninger skrev til den franske præsident Emmanuel Macron (L, afbilledet 22. januar, 2019) og Tysklands kansler Angela Merkel, at sige, at en manglende aftale ville bringe hele
- Forskere et skridt tættere på at skabe økologiske batterier
- Charmonium overraskelse på LHCb
- Hurtig test finder tegn på sepsis i en enkelt dråbe blod
- Brug af skåret metaltråde i mikrostørrelse, team skaber vej til nye anvendelser for terahertz-bø…
- Indonesien Sinabung-bjerget skyder en søjle af røg og aske op i himlen
- Nanoskala søjler som byggesten for fremtidens informationsteknologi