


Samarbejde kan resultere i en bedre selvkørende oplevelse

Kredit:CC0 Public Domain
I et dynamisk computerspil, hvor computeren også er en beslutningstager, du kan ofte finde dig selv i at konkurrere med spillet for at nå dit mål. På samme måde ved håndtering af en "selvkørende" bil, en bil udstyret med automatiseret køreteknologi, menneskelige chauffører har nogle gange også brug for at kæmpe med bilen om rattet for at holde selvkørende oplevelse sikker for sig selv og andre, og i sidste ende komme til den ønskede destination. Indtil nu, de fleste undersøgelser af denne drivende interaktion har i vid udstrækning været baseret på ikke-samarbejde spilteori, hvor førerens og computerens beslutninger om, hvordan bilen skal styres, ikke stemmer overens.
For bedre at forstå og forudsige resultaterne af ratkontroldilemmaet og i modsætning til mange tidligere undersøgelser, forfatterne Dr. Xiaoxiang Na og Dr. David J. Cole fra University of Cambridge hævdede, at det kan være mere egnet at bruge den kooperative spilteori til at modellere denne type interaktionsproblemer. Det argumenterede de i et papir udgivet i IEEE/CAA Journal of Automatica Sinica , en fælles udgivelse af IEEE og Chinese Association of Automation,
Ved hjælp af kooperativ spilteori, forfatterne skabte deres scenarie i en "Pareto-ligevægt"-forstand, en slags balanceret tilstand, hvor hverken den menneskelige fører eller bilens automatiserede styresystem er villig til at ændre deres styreadfærd ensidigt. Imidlertid, i denne "Pareto"-tilstand, selvom den menneskelige fører og det automatiske styresystem har forskellige ideer om, hvor bilen skal hen (for eksempel for at undgå en fodgænger, ved enten at gå ligeud eller foretage et vognbaneskift), den menneskelige fører vil i nogen grad være enig i det automatiserede styresystems hensigt og træffe beslutninger i overensstemmelse hermed.
For at finde ud af, om samarbejdsvilje ville give flere fordele til den selvkørende oplevelse, forfatterne sammenlignede også deres modelleringsresultater med resultaterne afledt af den ikke-kooperative spilteori.
Forfatterne påpegede, at brugen af samarbejdsstrategier har "resulteret i en forstærkning af førerens styrevinkelkontrol, hvilket igen gjorde det muligt for bilen at vende tilbage fra en risikabel vognbaneskifte-manøvre tilbage til en mere sikker lige linje, der kører hurtigt."
I fremtiden, flere eksperimenter vil være nødvendige for yderligere at undersøge, hvordan samarbejdsstrategien vil påvirke en menneskelig chaufførs interaktioner med et automatiseret styresystem. Forfatterne håber, at det, de finder, kan indbygges i automatiseret styreteknologi, så teknologien kan tage hensyn til menneskelige chaufførers virkelige styreoplevelse for at opnå bedre fælles kontrol mellem mennesker og selvkørende biler.
 Varme artikler
Varme artikler
-
 Disney overtager Hulu fra Comcast, da stream wars bliver varmereDenne 27. juni, 2015, fil foto, viser Hulu -logoet på et vindue i Milk Studios -rummet i New York. Disney har indgået en aftale med Comcast, der giver den fuld kontrol over streamingtjenesten Hulu. Se
Disney overtager Hulu fra Comcast, da stream wars bliver varmereDenne 27. juni, 2015, fil foto, viser Hulu -logoet på et vindue i Milk Studios -rummet i New York. Disney har indgået en aftale med Comcast, der giver den fuld kontrol over streamingtjenesten Hulu. Se -
 Maskinlæring bruges til at hjælpe landmænd med at vælge optimale produkter, der passer til deres…Årevis, landmænd har udvalgt afgrøder gennem de bedste tilgængelige råd - frøvejledninger, lokale agronomer og frøhandlere. Fremskridtene inden for kunstig intelligens har givet muligheder for at unde
Maskinlæring bruges til at hjælpe landmænd med at vælge optimale produkter, der passer til deres…Årevis, landmænd har udvalgt afgrøder gennem de bedste tilgængelige råd - frøvejledninger, lokale agronomer og frøhandlere. Fremskridtene inden for kunstig intelligens har givet muligheder for at unde -
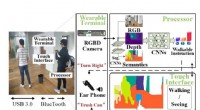 Et bærbart system til at hjælpe synshandicappedeEn oversigt over VI -hjælpesystemet. Systemet indeholder en bærbar terminal, der består af et RGBD -kamera og en øretelefon, en processor og et touch -interface, der tilbyder walkable instruktioner og
Et bærbart system til at hjælpe synshandicappedeEn oversigt over VI -hjælpesystemet. Systemet indeholder en bærbar terminal, der består af et RGBD -kamera og en øretelefon, en processor og et touch -interface, der tilbyder walkable instruktioner og -
 Solceller kunne køle vores hjem med solens kraftKredit:CC0 Public Domain Det Internationale Energiagentur har kaldt den øgede globale efterspørgsel efter køling som en af de mest kritiske blinde vinkler i dagens energidebat. En ny undersøgels
Solceller kunne køle vores hjem med solens kraftKredit:CC0 Public Domain Det Internationale Energiagentur har kaldt den øgede globale efterspørgsel efter køling som en af de mest kritiske blinde vinkler i dagens energidebat. En ny undersøgels
- Erfaringer fra Sierra Leones Ebola-pandemi om virkningen af skolelukninger på piger
- Ingeniører udvikler origami -elektronik fra billige, foldbart papir
- En simpel metode ætser mønstre på atomskala
- Omhyggeligt udformede lysimpulser styrer neuronaktivitet
- Rumtemperaturkonvertering af CO2 til CO:En ny måde at syntetisere kulbrinter på
- Rusland afslører klimatilpasningsplan