


Brug af en formhukommelsespolymer som en robotgriber
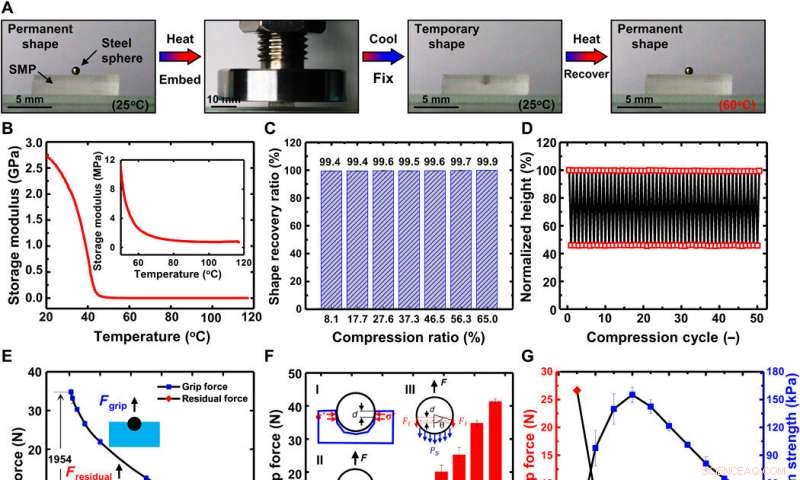
Karakterisering af epoxy SMP-materialet og SMP-griberen. (A) Demonstration af SMP'ens midlertidige formfiksering og permanente formhukommelseseffekt. (B) Opbevaringsmodul versus temperatur af SMP-materialet. Indsæt:Forstørrelse af lagermodulet i forhold til temperatur ved højere temperaturer. (C) Formgendannelsesforhold for SMP'en under forskellige kompressionsforhold. (D) Ydeevne af SMP under gentagen komprimering. (E) Sammenligning af grebet og resterende kræfter som funktioner af grebshastighederne. Parametre for måling af grebskraft:temperatur til indstøbning, 120°C; temperatur til at trække, 30°C; indlejringsdybde, 3 mm; indrykning diameter, 5 mm. (F) Indlejringsvinklens indflydelse på gribekraften (temperatur for indstøbning, 120°C; temperatur til at trække, 30°C; indrykning diameter, 5 mm; greb hastighed, 100 μm/s). Indsætninger viser den underliggende mekanisme for grebet. (I og II) Profilillustrationer, der viser konfigurationsudviklingen af SMP-griberen og det indlejrede kuglesystem under gribeprocessen. (III) Kraftdiagram af den indlejrede kugle i lodret retning. (G) Temperaturens indflydelse på gribekraften. Linjen med røde romber giver grebet kraft, mens linjen mærket med blå firkanter viser vedhæftningen. Gribekraften opnås fra indstøbnings- og udtrækstestene (temperatur for indstøbning, 120°C; temperatur til at trække, 30°C; indrykning diameter, 5 mm; indlejringsdybde, 3 mm; greb hastighed, 1000 μm/s), mens vedhæftningsstyrken under samme adskillelseshastighed (1000 μm/s) opnås ved træktest mellem en glasplade og SMP. Billedkredit:Changhong Linghu, Zhejiang Universitet. Kredit: Videnskabens fremskridt (2020). DOI:10.1126/sciadv.aay5120
Et team af forskere ved Zhejiang University har skabt en ny robotgriber ved hjælp af en formhukommelsespolymer. I deres papir offentliggjort i tidsskriftet Videnskabens fremskridt , gruppen beskriver materialet, dens brug som griber, og hvor godt det fungerede.
I løbet af de sidste mange årtier, videnskabsmænd har brugt en række forskellige tilgange til at give en robot mulighed for at samle op og manipulere objekter og sætte dem ned igen - alt sammen uden at beskadige objektet. Der er gjort store fremskridt inden for robotgribere, hovedsagelig på grund af fremskridt inden for mikrochipteknologi, men der er stadig meget plads til forbedring. En af de største udfordringer er at udvikle en griber, der kan opfange og manipulere genstande af næsten enhver form, forskellige størrelser, og lavet af forskellige materialer. At skabe en menneskelig hånd-lignende griber, der er i stand til at samle en nål op fra et bord, bære et råt æg hen over et rum eller bind et barns bånd i hendes hår, kræver en meget sofistikeret griber og tilhørende software. I denne nye indsats, forskerne har gjort op med behovet for sofistikering ved at tage en helt anden tilgang.
Tidligere forskning har vist, at når visse polymerer opvarmes, de udvider sig lidt og bliver bløde. Forskerne brugte begge egenskaber til at skabe deres nye griber. De skabte en polymergriber, der blødgøres, når den opvarmes til 45°C og derefter hærder igen, når den udsættes for 25°C. Dens basisform er kubisk (et 3-D rektangel). De fastgjorde derefter griberen til en simpel arm, der var i stand til at placere griberen ned mod en bordplade eller løfte den lige over bordet - nok til at tillade placering af forskellige genstande nedenunder.
Testen involverede at placere en genstand såsom en lille stålkugle under griberen og derefter opvarme hele apparatet i et indelukke til 45°C. Efter et par minutter, polymeren var blødgjort. Forskerne sænkede derefter griberen til objektet, tillader objektet at blive omsluttet - svarende til at sætte en blød smørstang på en gaffel. Temperaturen i indelukket blev derefter reduceret til 25°C. På det tidspunkt, polymeren krympede lidt, greb fat i genstanden, mens den stivnede. Forskerne hævede derefter griberen og den genstand, den holdt. For at sætte objektet ned igen, forskerne sænkede griberen til bordet og hævede temperaturen i kabinettet til 45°C.
© 2020 Science X Network
Sidste artikelFear of Big Brother vejleder EU's regler om AI
Næste artikelStædig stamme af Android malware disses nulstillinger
 Varme artikler
Varme artikler
-
 Konvertering af Wi-Fi-signaler til elektricitet med nye 2D-materialerKredit:CC0 Public Domain Forestil dig en verden, hvor smartphones, bærbare computere, wearables, og anden elektronik drives uden batterier. Forskere fra MIT og andre steder har taget et skridt i d
Konvertering af Wi-Fi-signaler til elektricitet med nye 2D-materialerKredit:CC0 Public Domain Forestil dig en verden, hvor smartphones, bærbare computere, wearables, og anden elektronik drives uden batterier. Forskere fra MIT og andre steder har taget et skridt i d -
 Deepfakes kaldte ny valgtrussel, uden let løsningHouse Intelligence Committee formand Adam Schiff, D-Californien, venstre, hilser vidne Clint Watts, en cybersikkerheds- og efterretningsekspert hos Foreign Policy Research Institute, ved en høring om
Deepfakes kaldte ny valgtrussel, uden let løsningHouse Intelligence Committee formand Adam Schiff, D-Californien, venstre, hilser vidne Clint Watts, en cybersikkerheds- og efterretningsekspert hos Foreign Policy Research Institute, ved en høring om -
 Forskere udvikler et-trins, 3-D print til multimateriale projekterNærbillede af 3D-printet multimateriale prøveobjekt. Kredit:WSU I lighed med udviklingen fra sort/hvid til farveudskrivning, et forskerhold fra Washington State University har for første gang brug
Forskere udvikler et-trins, 3-D print til multimateriale projekterNærbillede af 3D-printet multimateriale prøveobjekt. Kredit:WSU I lighed med udviklingen fra sort/hvid til farveudskrivning, et forskerhold fra Washington State University har for første gang brug -
 Forstå nye blockchain -identitetsstyringssystemerKredit:CC0 Public Domain Traditionel identitetsstyring har typisk involveret lagring af brugeroplysninger (f.eks. adgangskoder) af organisationer og tredjeparter, hvilket ofte resulterer i bekymri
Forstå nye blockchain -identitetsstyringssystemerKredit:CC0 Public Domain Traditionel identitetsstyring har typisk involveret lagring af brugeroplysninger (f.eks. adgangskoder) af organisationer og tredjeparter, hvilket ofte resulterer i bekymri
- Økosystemvidenskabsprojekter
- Cellefysiologi: En oversigt over struktur, funktion og opførsel
- Forskere opdager high-def elektronveje i jord
- Nyt multispektralt buet sammensat øjekamera udviklet med ultra-stort synsfelt
- Sådan bruges en 12-volts LED på en 24 Volt
- Tager en jordskredstemperatur for at afværge katastrofe