


Googles robot lærer at gå i den virkelige verden
Kredit:arXiv:2002.08550 [cs.RO]
Robotteknologien tog et skridt fremad – efterfulgt af et andet, så flere - da en robot kaldet Rainbow Dash for nylig lærte sig selv at gå. Den firbenede maskine tog kun et par timer at lære at gå frem og tilbage, og drej til højre og venstre, mens du gør det.
Forskere fra Google, UC Berkeley og Georgia Institute of Technology udgav en artikel om ArXiv preprint-serveren, der beskriver en statistisk kunstig intelligens-teknik kendt som deep reinforcement learning, som de brugte til at producere denne præstation, hvilket er væsentligt af flere grunde.
De fleste implementeringer af forstærkende læring finder sted i computersimulerede miljøer. Rainbow Dash, imidlertid, brugt denne teknologi til at lære at gå i et faktisk fysisk miljø.
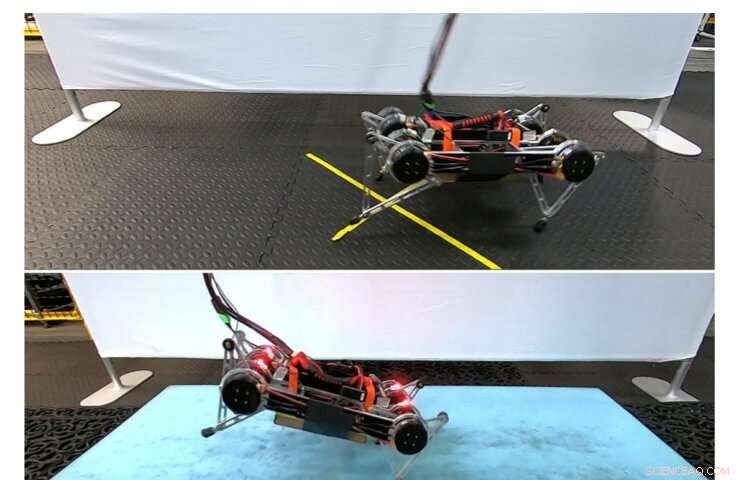
I øvrigt, det var i stand til at gøre det uden en dedikeret undervisningsmekanisme, såsom menneskelige instruktører eller mærkede træningsdata. Endelig, Rainbow Dash lykkedes med at gå på flere overflader, herunder en blød skummadras og en dørmåtte med ret bemærkelsesværdige fordybninger.
De dybe forstærkningslæringsteknikker, som robotten brugte, omfatter en type maskinlæring, hvor en agent interagerer med et miljø for at lære ved at prøve og fejle. De fleste tilfælde af forstærkningslæring involverer computeriserede spil, hvor digitale agenter lærer at spille for at vinde.
Denne form for maskinlæring er markant forskellig fra traditionel overvåget eller uovervåget læring, hvor maskinlæringsmodeller kræver mærkede træningsdata for at lære. Dyb forstærkende læring kombinerer forstærkende læringstilgange med dyb læring, hvor omfanget af traditionel maskinlæring udvides kraftigt med massiv regnekraft.
Selvom forskerholdet krediterede Rainbow Dash med at lære at gå selv, menneskelig indgriben spillede stadig en væsentlig rolle i at nå dette mål. Forskere var nødt til at skabe grænser, inden for hvilke robotten lærte at gå, for at forhindre den i at forlade området.
De skulle også udtænke specifikke algoritmer for at forhindre robotten i at falde ned, hvoraf nogle fokuserede på at begrænse robottens bevægelse. For at forhindre ulykker såsom faldskader, læring af robotforstærkning foregår normalt i et digitalt miljø, før algoritmer overføres til en fysisk robot for at bevare dens sikkerhed.
Rainbow Dashs triumf finder sted cirka et år efter, at forskere oprindeligt fandt ud af, hvordan man får robotter til at lære i fysisk, i modsætning til virtuelle, omgivelser.
Chelsea Finn, en Stanford-assistentprofessor tilknyttet Google, som ikke deltog i forskningen, siger, "Det er virkelig svært at fjerne personen fra [læringsprocessen]. Ved at tillade robotter at lære mere autonomt, robotter er tættere på at kunne lære i den virkelige verden, at vi lever."
© 2020 Science X Network
 Varme artikler
Varme artikler
-
 Østrigsk domstol slår ned loven om trojanske hesteovervågningMange mennesker bruger krypterede meddelelsestjenester som WhatsApp på deres telefoner Østrigs forfatningsdomstol har onsdag slået dele af en lov vedtaget af den tidligere regering, som ville have
Østrigsk domstol slår ned loven om trojanske hesteovervågningMange mennesker bruger krypterede meddelelsestjenester som WhatsApp på deres telefoner Østrigs forfatningsdomstol har onsdag slået dele af en lov vedtaget af den tidligere regering, som ville have -
 EU-parlamentet kræver, at Zuckerberg besvarer spørgsmål personligtEU-lovgivere vil have Zuckerberg til at besvare deres spørgsmål personligt, ligesom han gjorde før den amerikanske kongres Europa-Parlamentet krævede onsdag Facebook-chef Mark Zuckerberg at møde o
EU-parlamentet kræver, at Zuckerberg besvarer spørgsmål personligtEU-lovgivere vil have Zuckerberg til at besvare deres spørgsmål personligt, ligesom han gjorde før den amerikanske kongres Europa-Parlamentet krævede onsdag Facebook-chef Mark Zuckerberg at møde o -
 USA forsvarer tiltag til at tilbageføre regler for netneutralitetEn 5G -antenne på Deutsche Telekom står på Mobile World Congress i Barcelona Lederen af den amerikanske føderale kommunikationskommission forsvarede mandag sit skridt til at tilbageføre regler,
USA forsvarer tiltag til at tilbageføre regler for netneutralitetEn 5G -antenne på Deutsche Telekom står på Mobile World Congress i Barcelona Lederen af den amerikanske føderale kommunikationskommission forsvarede mandag sit skridt til at tilbageføre regler, -
 Kina undersøger formodet kundedatalæk hos Accor-partnerHuazhu, en af Kinas største hotelejere, sagde, at frigivelsen af dataene havde forårsaget en ond indvirkning, og at det var i gang med en intern undersøgelse Shanghais politi sagde, at de unde
Kina undersøger formodet kundedatalæk hos Accor-partnerHuazhu, en af Kinas største hotelejere, sagde, at frigivelsen af dataene havde forårsaget en ond indvirkning, og at det var i gang med en intern undersøgelse Shanghais politi sagde, at de unde
- Mikroskopiske metabiler drevet af intet andet end lys
- Kvælstoffikserende træer hjælper tropiske skove med at vokse hurtigere og lagre mere kulstof
- Rapporten viser, at onlineadfærd vedrørende troskab i forhold varierer efter alder
- Palæontologer skaber den mest detaljerede virtuelle 3-D-model af endokraniel støbning og blodkar i…
- Selvkomprimerende beton bliver mere bæredygtig takket være at bruge granitrester
- Nyt teleskop vil scanne himlen for asteroider på kollisionskurs med Jorden