


En ramme for indendørs robotnavigation blandt mennesker
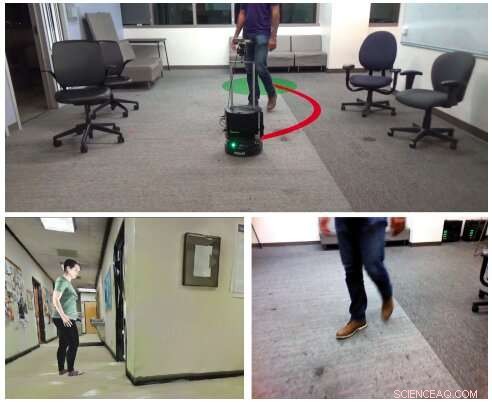
(Top) Et autonomt visuelt navigationsscenarie, som forskerne overvejer, i en hidtil ukendt, indendørs miljø med mennesker, ved at bruge monokulære RGB-billeder (nederst til højre). For at lære maskiner at navigere indendørs miljøer med mennesker, forskerne skabte HumANav, et datasæt, der giver mulighed for fotorealistisk gengivelse i simulerede miljøer (f.eks. nederst til venstre). Kredit:Tolani et al.
For at løse de opgaver, de er designet til at udføre, mobile robotter skal være i stand til at navigere i den virkelige verden effektivt, undgå mennesker eller andre forhindringer i deres omgivelser. Mens statiske objekter typisk er ret nemme for robotter at opdage og omgå, at undgå mennesker kan være mere udfordrende, da det indebærer at forudsige deres fremtidige bevægelser og planlægge i overensstemmelse hermed.
Forskere ved University of California, Berkeley, har for nylig udviklet en ny ramme, der kan forbedre robotnavigation blandt mennesker i indendørs miljøer såsom kontorer, hjem eller museer. Deres model, præsenteret i et papir, der er forududgivet på arXiv, blev trænet på et nyligt kompileret datasæt af fotorealistiske billeder kaldet HumANav.
"Vi foreslår en ny ramme for navigation omkring mennesker, der kombinerer læringsbaseret perception med modelbaseret optimal kontrol, " skrev forskerne i deres papir.
Den nye ramme, som disse forskere udviklede, døbt LB-WayPtNav-DH, har tre nøglekomponenter:en opfattelse, en planlægning, og et kontrolmodul. Perceptionsmodulet er baseret på et konvolutionelt neuralt netværk (CNN), der blev trænet til at kortlægge robottens visuelle input til et waypoint (dvs. den næste ønskede tilstand) ved hjælp af overvåget læring.
Waypointet, der er kortlagt af CNN, føres derefter til rammeværkets planlægnings- og kontrolmoduler. Kombineret, disse to moduler sikrer, at robotten bevæger sig sikkert til sit mål, undgå forhindringer og mennesker i omgivelserne.
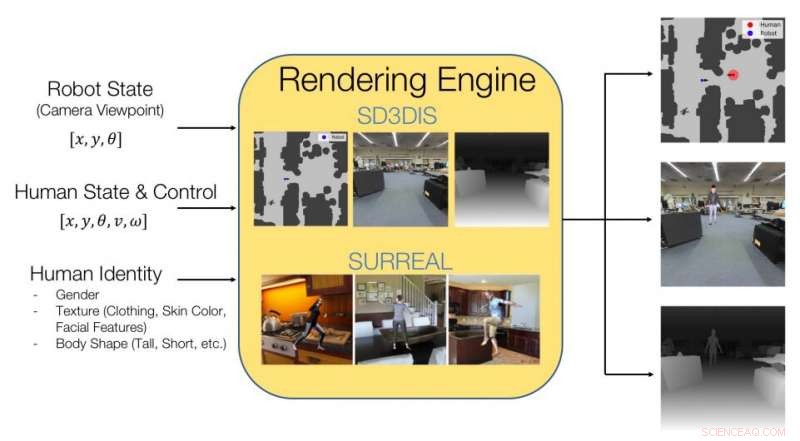
Billede, der forklarer, hvad HumANav-datasættet indeholder, og hvordan det opnår fotorealistisk gengivelse af indendørs miljøer, der indeholder mennesker. Kredit:Tolani et al.
Forskerne trænede deres CNN på billeder inkluderet i et datasæt, de kompilerede, døbt HumANav. HumANav indeholder fotorealistiske, gengivet billeder af simulerede bygningsmiljøer, hvor mennesker bevæger sig rundt, tilpasset fra et andet datasæt kaldet SURREAL. Disse billeder viser 6000 gående, teksturerede menneskelige masker, arrangeret efter kropsform, køn og hastighed.
"Den foreslåede ramme lærer at forudse og reagere på folks bevægelser kun baseret på et monokulært RGB-billede, uden eksplicit at forudsige fremtidige menneskelige bevægelser, " skrev forskerne i deres papir.
Forskerne evaluerede LB-WayPtNav-DH i en række eksperimenter, både i simuleringer og i den virkelige verden. I eksperimenter fra den virkelige verden, de anvendte det på Turtlebot 2, en billig mobil robot med open source-software. Forskerne rapporterer, at robotnavigationsrammerne generaliserer godt til usete bygninger, effektivt omgå mennesker både i simulerede og virkelige miljøer.
"Vores eksperimenter viser, at kombination af modelbaseret kontrol og læring fører til bedre og mere dataeffektiv navigationsadfærd sammenlignet med en rent læringsbaseret tilgang, " skrev forskerne i deres papir.
Den nye ramme kan i sidste ende anvendes på en række mobile robotter, forbedre deres navigation i indendørs miljøer. Indtil nu, deres tilgang har vist sig at fungere bemærkelsesværdigt godt, overførsel af politikker udviklet i simulering til virkelige miljøer.
I deres fremtidige studier, forskerne planlægger at træne deres rammer på billeder af mere komplekse eller overfyldte miljøer. Ud over, de vil gerne udvide det træningsdatasæt, de har udarbejdet, herunder et mere varieret sæt billeder.
© 2020 Science X Network
Sidste artikelHacker bringer video til lydkassettebånd
Næste artikelEn fleksibel mikrorobot, der kan overleve næsten enhver deformation
 Varme artikler
Varme artikler
-
 Ignorer de håndvridende overskrifter om den forestående AI-revolution, men gør dig klar til forst…Et billede af medforfatteren John D. Woods øje skabt ved hjælp af kunstig intelligens. Kredit:Nada Sanders Entreprenørånden. Menneskelig opfindsomhed. Det kreative sind. Det er de egenskaber, som
Ignorer de håndvridende overskrifter om den forestående AI-revolution, men gør dig klar til forst…Et billede af medforfatteren John D. Woods øje skabt ved hjælp af kunstig intelligens. Kredit:Nada Sanders Entreprenørånden. Menneskelig opfindsomhed. Det kreative sind. Det er de egenskaber, som -
 E-whiskers kan være prøvesten for fremtiden for e-skinKredit:University of Texas i Dallas De søde små knurhår, du ser på dit kæledyr, gør mere end blot at rykke yndigt. Den lange, udstående hår er faktisk berøringsreceptorer, at sende vital informati
E-whiskers kan være prøvesten for fremtiden for e-skinKredit:University of Texas i Dallas De søde små knurhår, du ser på dit kæledyr, gør mere end blot at rykke yndigt. Den lange, udstående hår er faktisk berøringsreceptorer, at sende vital informati -
 Automatiseret talegenkendelse mindre præcis for sorte:undersøgelseKredit:CC0 Public Domain Teknologien, der driver landets førende automatiserede talegenkendelsessystemer, laver dobbelt så mange fejl ved fortolkning af ord, der tales af afroamerikanere, som når
Automatiseret talegenkendelse mindre præcis for sorte:undersøgelseKredit:CC0 Public Domain Teknologien, der driver landets førende automatiserede talegenkendelsessystemer, laver dobbelt så mange fejl ved fortolkning af ord, der tales af afroamerikanere, som når -
 British Airways piloter accepterer lønaftale for at afslutte strejkerBritish Airways piloter holdt en walkout i september for første gang i flyselskabets historie Piloter fra fagforeningen BALPA accepterede mandag en lønaftale med flagskibsselskabet British Airways
British Airways piloter accepterer lønaftale for at afslutte strejkerBritish Airways piloter holdt en walkout i september for første gang i flyselskabets historie Piloter fra fagforeningen BALPA accepterede mandag en lønaftale med flagskibsselskabet British Airways
- Luftkvalitet forbliver et problem i Indien på trods af forureningskontrolpolitikker
- Calculus-instruktionsmetoder afslører mekanismer, der modvirker BIPOC-deltagelse i STEM
- Forskere når et nyt niveau af klarhed i registrering af proteiner, der bevæger sig gennem lipider
- High definition diagnostisk ultralyd på nanoskala
- Ny biobilledteknik er hurtig og økonomisk
- Hvilken effekt har geografi på klimaet?