


En fleksibel, stangdrevet blød robot til biomedicinske applikationer
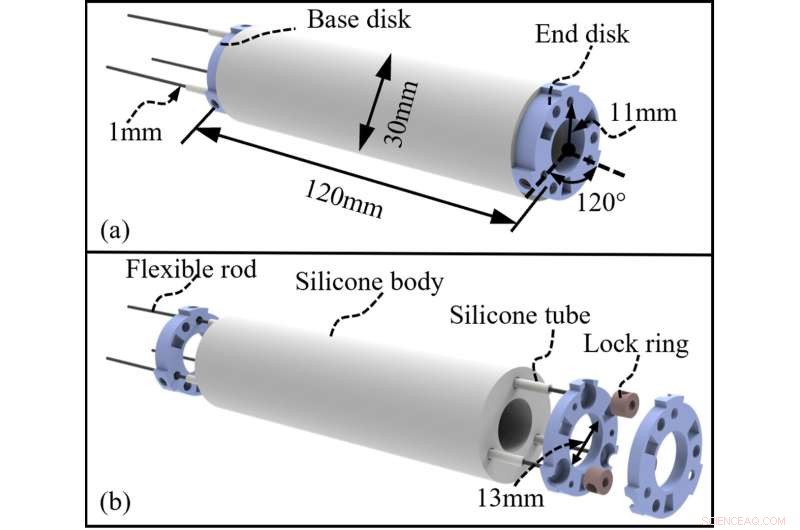
Struktur af den stangdrevne bløde arm. (a) Designoversigt. (b) Sprængbillede. Kredit:Wang et al.
Bløde robotter, der kan udføre opgaver med høj effektivitet, nøjagtighed og præcision, kan have adskillige værdifulde applikationer. For eksempel kunne de introduceres i medicinske omgivelser, hjælpe læger med at udføre komplekse kirurgiske procedurer eller hjælpe ældre og sårbare patienter under rehabilitering.
Bløde robotter er mere fleksible og kan deformere mere. Dette kan resultere i en øget fingerfærdighed (dvs. bedre manuelle færdigheder ved udførelse af opgaver), samt i en reduktion af nyttelast (dvs. robottens kapacitet til at bære en last), fordi de kan producere mindre kræfter end stive robotsystemer
Forskere ved National University of Singapore og Beijing Jiaotong University har for nylig udviklet en ny stangdrevet blød robot (RDSR), der fungerer gennem push- og pull-bevægelser. Denne robot, præsenteret i et papir offentliggjort i IEEE Robotics and Automation Letters , kombinerer mekanismerne i to robotsystemer, der tidligere er skabt af medlemmer af forskergruppen.
"En velafbalanceret ydeevne i form af fingerfærdighed, nøjagtighed og nyttelast kunne have et stort potentiale i bløde robotapplikationer," sagde Cecilia Laschi, en af forskerne, der udførte undersøgelsen, til TechXplore. "Mange undersøgelser fokuserer på dette område, og nogle få værker og tidligere resultater inspirerede os. For eksempel udviklede vi i en banebrydende forskning offentliggjort i Materials Science and Engineering en blød robot inspireret af blæksprutten, drevet af langsgående og tværgående sener, på samme måde til blækspruttens muskler."
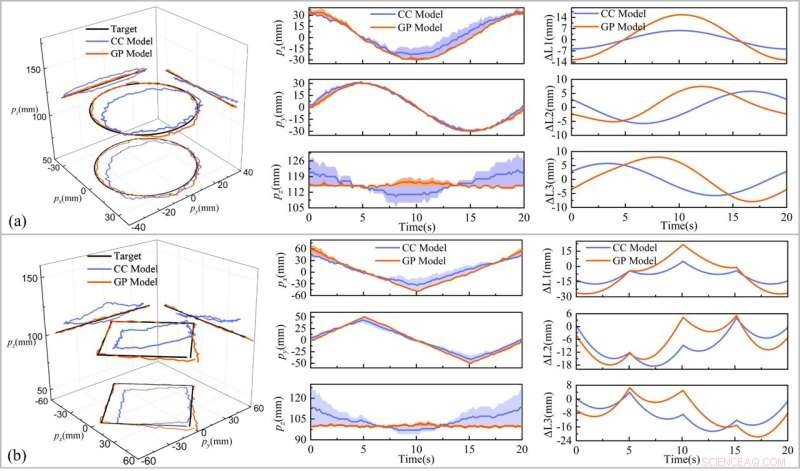
Banesporing af åben sløjfe kontrol baseret på CC og GP model. (a) Tilfælde af cirkulær sti. (b) Sag for kvadratisk sti. Kredit:Wang et al.
Den tidligere robot skabt af Laschi og hendes kolleger ved BioRobotics Institute of Scuola Superiore Sant'Anna i Italien kan efterligne den måde, hvorpå en blæksprutte bevæger sig ved at forlænge, forkorte og bøje dens tentakler. Deres nyudviklede system kunne være særligt lovende til at gennemføre missioner i lukkede rum, såsom rengøring eller udforskning, adgang til dybe hulrum og intervenering inde i menneskekroppen.
"Det andet studie, der inspirerede vores seneste arbejde, var mit forskerholds udvikling af en kontinuum-robot baseret på push-pull fleksible stænger," forklarede Peiyi Wang, en anden forsker involveret i undersøgelsen. "Ved at kombinere den rene bløde krop i vores blæksprutte-inspirerede system og den stangdrevne arm af Wangs robot, sigter vores nye robot mod at opnå en afbalanceret ydeevne i bevægelsesnøjagtighed, arbejdsområde, DOF, stivhed og aktiv udgangskraft."
Den nye robot skabt af Laschi, Wang og deres kollegaer består af en silikoneblød krop, en stiv base, endeskiver og tre siliciumrør, der hver er vært for en fleksibel Nitinol (NiTi)-baseret stang. Siliciumlegemet, som er integreret mellem bunden og endeskiven, er meget blødt og fleksibelt, så det nemt kan forlænges, forkortes og bøjes.
"Hver af vores systems fleksible stænger kan styres i både skubbe- og trækkeretninger, hvilket er forskelligt fra sener med kun trækkende handling," sagde Wang. "Den stangdrevne bløde robot (RDSR) kan derefter realisere flere bevægelser i alle retninger (flere DOF'er) gennem koordineret kontrol af tre push-pull stænger."
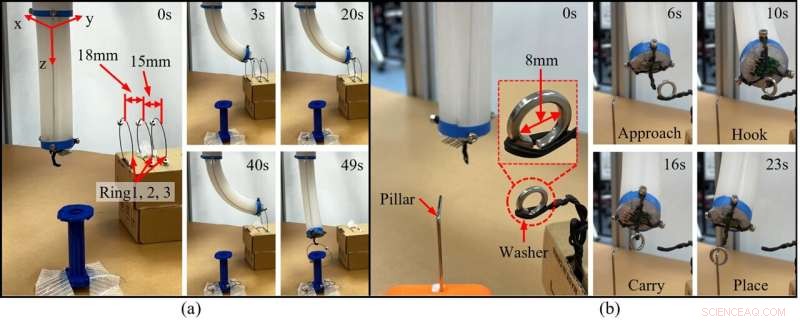
Objektmanipulationer udført af vores bløde robot. RDSR gennemførte pick-and-place opgaver med stor arbejdsområde præcis betjening. (a) Objekterne blev placeret nær grænsen af arbejdsområdet (opgave 1). (b) En genstand med en lille diameter på 8 mm blev placeret (opgave 2). Kredit:Wang et al.
Forskerne evaluerede deres RDSR i en række tests, hvor de sammenlignede dens ydeevne med en silikonebaseret senedrevet blød robot (TDSR). De fandt ud af, at deres nye robotsystem var stivere og kunne fungere inden for et bredere arbejdsområde (fra 2,6 til 5,2 gange større).
I modsætning til TDSR'en sammenlignede de den også, kunne deres robot aktivt anvende skubbede vinkelrette kræfter på et skråplan og kunne også udføre opgaver, der involverer objektmanipulation. Tilsammen tyder alle disse resultater på, at den nye robot kunne være mere effektiv til at udføre opgaver, der indebærer opsamling og placering af genstande i større rum og med høj præcision.
"Bevægelsen opnået med tovejs, push-pull aktivering er original," sagde Laschi. "Det giver den bløde robot en mere nøjagtig kontrol. En bemærkelsesværdig implikation af vores arbejde er dens potentiale til at muliggøre afbalanceret ydeevne i form af fingerfærdighed, nøjagtighed og nyttelast."
I fremtiden kan det nye RDSR-system skabt af dette team af forskere hjælpe med at tackle komplekse opgaver mere effektivt og pålideligt og opnå højere præcisionsniveauer. I deres næste undersøgelser vil Laschi og hendes kolleger gerne teste robotternes effektivitet til biomedicinske anvendelser, herunder kirurgi, rehabilitering og ældrepleje.
"Vi planlægger også at forbedre den bløde arm, vi skabte på andre aspekter, som ikke er strengt relateret til dens design og mekanik, men til kontrollen af dens bevægelser," tilføjede Laschi. "At tilføje og modellere distribueret proprioception, dvs. opfattelsen af armens egen kropsholdning, er en udfordring at tage fat på, såvel som et robust sensorsystem til at detektere kontaktkræfter." + Udforsk yderligere
Konfiguration og manipulation af blød robotteknologi til on-orbit service
© 2022 Science X Network
 Varme artikler
Varme artikler
-
 Amazon -personalestadiet strejker i Tyskland på den store salgsdagAmazon -arbejdere strejkede i Tyskland for at kræve bedre lønninger, da den amerikanske detailhandelsgigant lancerede sin Prime Day globale shopping -ekstravaganza Amazon -ansatte strejkede mandag
Amazon -personalestadiet strejker i Tyskland på den store salgsdagAmazon -arbejdere strejkede i Tyskland for at kræve bedre lønninger, da den amerikanske detailhandelsgigant lancerede sin Prime Day globale shopping -ekstravaganza Amazon -ansatte strejkede mandag -
 Hvorfor Facebook ikke blokerede live videooptagelse i New Zealand (opdatering)Denne kombination af billeder viser logoer for virksomheder fra venstre, Twitter, YouTube og Facebook. Disse internetvirksomheder og andre siger, at de arbejder på at fjerne videofilm, der er filmet a
Hvorfor Facebook ikke blokerede live videooptagelse i New Zealand (opdatering)Denne kombination af billeder viser logoer for virksomheder fra venstre, Twitter, YouTube og Facebook. Disse internetvirksomheder og andre siger, at de arbejder på at fjerne videofilm, der er filmet a -
 Forbedring af den lodrette mobilitet af den seksbenede robot RHex ved hjælp af mikrospinerKredit:Adam Zeloof. Et team af forskere ved Carnegie Mellon University har for nylig foreslået en metode til at forbedre den vertikale mobilitet af en berømt hexapod-robot. Deres tilgang, præsente
Forbedring af den lodrette mobilitet af den seksbenede robot RHex ved hjælp af mikrospinerKredit:Adam Zeloof. Et team af forskere ved Carnegie Mellon University har for nylig foreslået en metode til at forbedre den vertikale mobilitet af en berømt hexapod-robot. Deres tilgang, præsente -
 Siemens vinder Canada -togkontrakt over BombardierSiemens Canada vil fremstille tog til udskiftning af en aldrende flåde på linjen mellem Quebec og Windsor via Montreal, Ottawa og Toronto-landets mest brugte Den tyske producent Siemens opsagde de
Siemens vinder Canada -togkontrakt over BombardierSiemens Canada vil fremstille tog til udskiftning af en aldrende flåde på linjen mellem Quebec og Windsor via Montreal, Ottawa og Toronto-landets mest brugte Den tyske producent Siemens opsagde de
- Liste over planter, der er unikke til løvfældende skove
- Virksomhedsbedrageri kan føre til økonomisk kriminalitet i nabolaget
- Gravitationskræfter i protoplanetariske skiver kan skubbe superjorden tæt på deres stjerner
- Neutroner kigger ind i en kørende motor
- Regler for opdeling af negative tal
- Ny undersøgelse undersøger egenskaberne ved Melotte 105-klyngen