


Sub-picosecond foton-effektiv billeddannelse ved hjælp af enkelt-foton sensorer
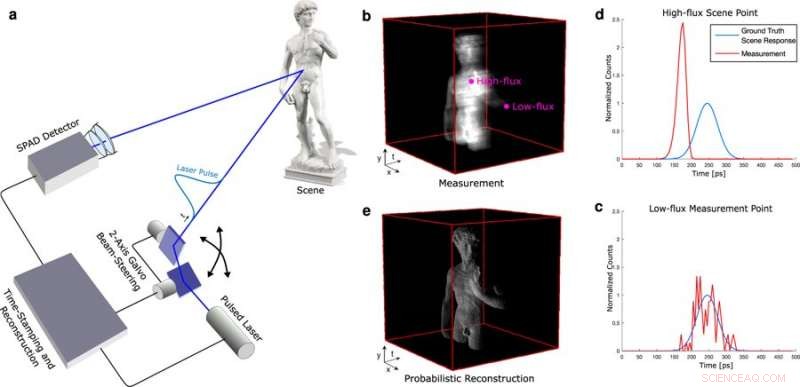
Sub-picosecond 3D Imaging Framework. (a) En kollimeret, pulserende laser oplyser scenen på et enkelt punkt. Laseren scannes sideværts ved hjælp af et 2-akset spejlgalvanometer. Timing og kontrolelektronik tidsstempler hver detekteret fotonankomst i forhold til den sidst udsendte puls og akkumulerer disse hændelser i et histogram af rumlige-temporale fotontællinger (b). Dette histogram behandles for at estimere både reflektivitet og dybdeinformation (c). To punkter er fremhævet, den ene svarer til højflux (d) og den anden til lavflux (e) målinger. Mens sidstnævnte larmer, højfluxmålinger lider af pileup-forvrængning, som introducerer en betydelig bias for dybdeestimering af konventionelle algoritmer. Den foreslåede estimeringsmetode modellerer nøjagtigt begge disse scenarier, giver mulighed for at estimere reflektansinformation og rejsetid med sub-picosecond nøjagtighed ud fra alvorligt forvrængede målinger. Kredit: Videnskabelige rapporter , Doi:10.1038/s41598-018-35212-x
Enkeltfoton lavinedioder (SPAD'er) er lovende detektorteknologier, der kan bruges til at opnå aktive 3D-billeddannelsessystemer med hurtig optagelse, høj timing nøjagtighed og høj detektionsfølsomhed. Sådanne systemer har brede anvendelser inden for biologisk billeddannelse, fjernmåling og robotteknologi. Imidlertid, Detektorerne står over for tekniske svækkelser kendt som pileup, der forårsager måleforvrængninger, der begrænser deres præcision. I en nylig undersøgelse, udført ved Stanford University Department of Electrical Engineering, videnskabsmænd Felix Heide og kolleger udviklede en sandsynlig billeddannelsesmodel, der nøjagtigt kunne modellere pileup. Ved at bruge den foreslåede model, forskerne udtænkte omvendte metoder til effektivt og robust at estimere scenedybden og reflektansen ud fra registrerede fotontællinger. Med algoritmen, de var i stand til at demonstrere forbedringer af nøjagtigheden af timing, sammenlignet med eksisterende teknikker. Vigtigere, modellen tillod nøjagtighed ved sub-picosecond i fotoneffektiv 3D-billeddannelse for første gang i praktiske scenarier, hvorimod tidligere kun meget varierende fotontællinger blev observeret. Resultaterne er nu offentliggjort i Videnskabelige rapporter .
Aktiv billeddannelse har brede anvendelser på tværs af discipliner, der spænder fra autonom kørsel til mikroskopisk billeddannelse af biologiske prøver. Nøglekrav til disse applikationer omfatter høj nøjagtighed med timing, hurtige opkøbsrater, dynamiske driftsområder og høj detektionsfølsomhed over for billedobjekter, der er skjult for et kameras visning. Fjernmåling og automatiserede applikationer kræver erhvervelse spænder fra <1 meter til kilometerskalaen.
Non-line-of-sight billeddannelse er afhængig af at opnå kodet information via de få tilbagevendende fotoner af multipliceret spredt indirekte lys, ud over det direkte reflekterede lys. For at aktivere disse applikationer, ultrafølsomme detektorer blev udviklet til at optage individuelle fotoner, der vender tilbage fra en pulserende belysningskilde. Enkeltfoton lavinedioder (SPAD'er) er en af de mest følsomme tidsopløste detektorteknologier, der kan fremstilles ved hjælp af den komplementære metal-oxid-halvleder (CMOS) fremstillingsproces. SPAD'erne blev hurtigt etableret som en kernedetektorteknologi til 3D-billeddannelse.
I sit funktionsprincip, SPAD'er er omvendt forspændte fotodioder, der fungerer i Geiger-tilstand, altså over deres gennemslagsspænding. Når fotoner falder ind på den aktive overflade af en SPAD, en tidsstemplet elektron lavine kan udløses. Gentagen tidsstempling af fotoner, der vender tilbage fra en synkront pulseret belysningskilde, der typisk fungerer ved MHz-hastigheder, kan akkumulere et histogram af fotontællinger i tid. Det resulterende histogram dokumenterer den omtrentlige intensitet af den returnerende lysimpuls for at genoprette og karakterisere afstanden, reflektans og 3D-geometri af et objekt skjult.
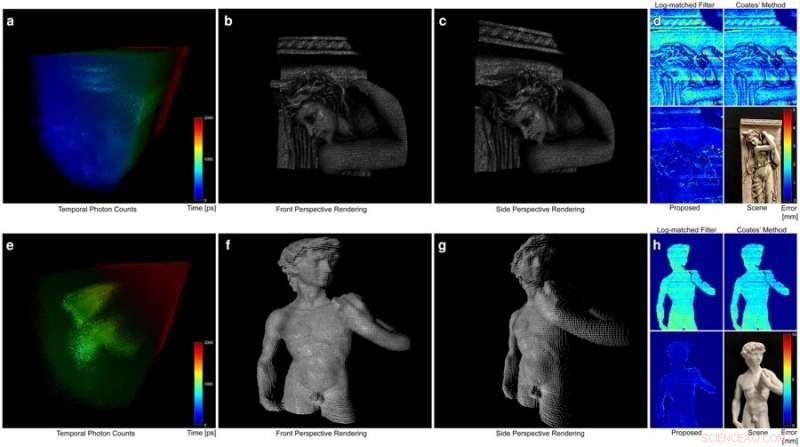
Eksperimentelle rekonstruktioner. En registreret spatio-temporal fordeling af fotontal. (en, e) behandles for at estimere en 3D-punktsky (b, c, f, g) der indeholder både dybde- og albedoinformation, her vist for to forskellige scener (fotografier vist i (d, h)). De farvekodede fejlkort (d, h) direkte sammenligne resultaterne af adskillige dybdeestimeringsteknikker, inklusive log-matchet filtrering, Coates' metode efterfulgt af Gaussian fit (ved højfluxmåling), og den foreslåede metode. Kredit: Videnskabelige rapporter , Doi:10.1038/s41598-018-35212-x
Afhængig af den forventede anvendelse, SPAD'er kan fungere i friløbstilstand (der gør det muligt at detektere alle fotonhændelser samtidigt på alle ankomsttider) eller gated-tilstand (hvor kun fotoner i et bestemt tidsvindue mellem impulser detekteres). Alle applikationer er underlagt et grundlæggende fænomen kendt som pileup-forvrængning, der i høj grad begrænser nøjagtigheden. Pileup kan i sagens natur begrænse SPAD-detektorens funktionsprincip. For eksempel, efter hver udløst elektron lavine, detektoren kræver quenching før detektering af yderligere fotonankomsthændelser. I denne 'døde tid' (ti til hundredvis af nanosekunder), detektoren er inaktiv. Dette kan resultere i, at de tidligere fotoner af en enkelt laserpuls udløser en lavine, mens senere pulser sandsynligvis ignoreres i dødtiden; skabe unøjagtige skæve målinger kendt som pileup. Fænomenet kan undgås ved at betjene aktive billeddannelsessystemer i et lavflux-regime, som set med state-of-the-art teknikker brugt til første-foton billeddannelse før.
Imidlertid, betingelserne varierer for 3D-billeddannelsesapplikationer i robotteknologi, biologisk billeddannelse eller automotive sensing, da de opererer i miljøer, hvor objekter, der afspejler både høje og lave antal fotoner, er afgørende for beslutningstagning. Den store varians i optagne fotontællinger, der skyldes forskellige dybder eller forskellige genstandes varierende reflektivitet, er afgørende for 3D-billeddannelse. I dette arbejde, Heide et al. introducerede en ny estimeringsalgoritme, der overvandt eksisterende begrænsninger for aktive 3D-billeddannelsessystemer ved hjælp af gratis kørende SPAD'er.
Den foreslåede metode forbedrede nøjagtigheden af den eksisterende dybde- og albedo-estimering, over en bred vifte af målinger med lav flux til høj flux. Forskerne introducerede en probabilistisk billeddannelsesmodel, der inkluderede pileup, med effektive inverse metoder udledt til dybde- og albedo-estimeringer. Rekonstruktionsrammen estimerede i fællesskab alle ukendte parametre for at overvinde algoritmiske begrænsninger, der tidligere begrænsede timingpræcisionen. Den foreslåede metode gjorde det muligt for meget nøjagtig og hurtig 3D-billeddannelse at åbne nye driftsregimer for fotoneffektiv 3D-billeddannelse anvendelig under forhold med dramatisk varierende fotontal.
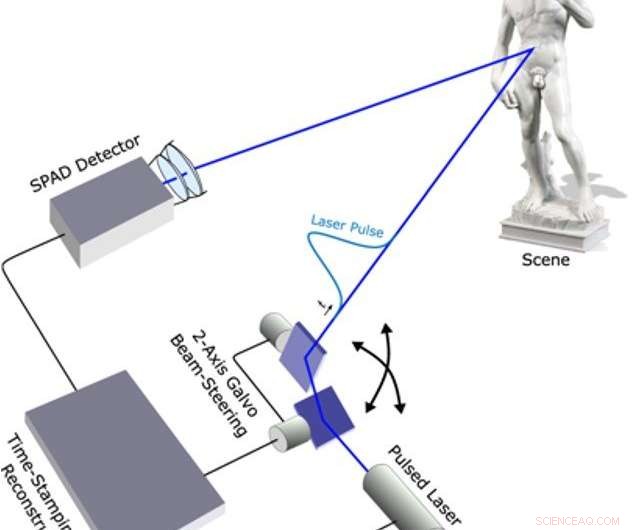
Eksperimentel hardware til 3D-billeddannelse. Den skematiske illustration viser scenen 'Statue of David', kilde til belysning og proceduren for tidsstempling til billedrekonstruktion. Kredit: Videnskabelige rapporter , Doi:10.1038/s41598-018-35212-x
Ydeevnen af den foreslåede metode blev vurderet på to scener med meget varierende reflektans og dybdeprofiler, som omfattede statuen af David og en Bas-relief scene. Begge forekomster indeholdt objekter med komplekse geometrier og varierende reflektansegenskaber, herunder spejlende adfærd for "Statue of David" og Lambertian-reflektans med rumligt varierende albedo i 'Bas-relief'-scenen. For begge scener fangede forskerne en jordsandhedsreferencemåling (information leveret af empiriske beviser) med et 5 % neutral densitetsfilter, som eliminerede pileup-forvrængninger ved at dæmpe kildeintensiteten.
Systemets hardware indeholdt en tidsbestemt sensor, pulserende laser, belysning og opsamlingsoptik. Opsætningen havde også et sæt scanningsspejle for at opnå et rasterscanningsbelysningsmønster. Timingen af foton-ankomster blev fanget med et PicoHarp 300 tidskorreleret enkelt foton-tællemodul. Belysningskilden var en 450 nm eller 670 nm picosekund laser (genererende fuld bredde ved halv maksimum FWHM, pulsbredder på 90 ps og 50 ps). Samlingsoptikken bestod af en 75 m objektivlinse, 30 mm relælinse og et mikroskopobjektiv, designet til at udvide SPAD'ens synsfelt over det område, der scannes af belysningskilden.
De eksperimentelle målinger tjente som input til den foreslåede metode og blev erhvervet uden nogen filtre i den optiske vej. Dybde- og albedo-rekonstruktioner sammen med tilsvarende fejlkort blev opnået under undersøgelsen. Resultaterne bekræftede, at den foreslåede metode opnåede højkvalitetsrekonstruktioner upåvirket af sceneafhængig pileup eller skudstøj (elektronisk støj forbundet med lysets partikelnatur). Resultaterne blev sammenlignet med konventionelle metoder, såsom det log-matchede filter-estimat og Coates' pileup-korrektionsmetode, der ikke så effektivt undertrykte pileup og led af sceneafhængig dybdepræcision. I modsætning, metoden introduceret af Heide et al. opnået sub-picosecond nøjagtighed.
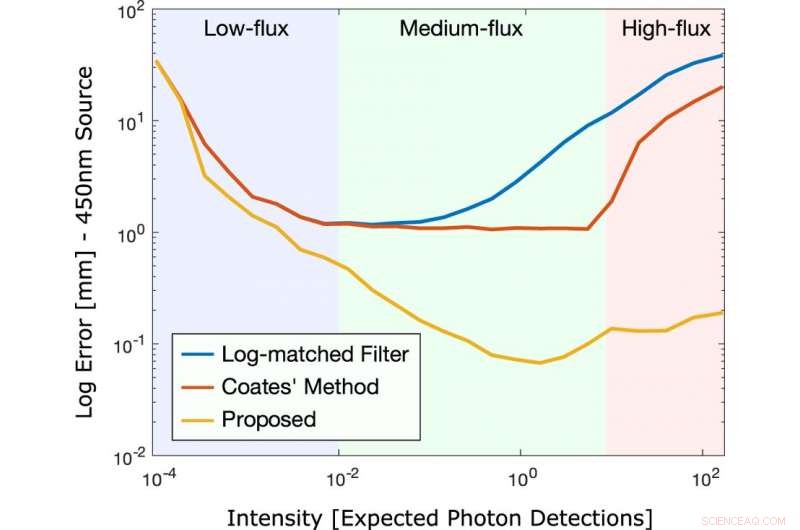
Optimalt fotontællingsregime. Dybdrekonstruktionsnøjagtighed for varierende fotontællinger for 450 nm Alphalas LD-450-50 laser (FWHM på 90 ps). Det konventionelle log-matchede filter, Coates metode, og den foreslåede metode sammenlignes. Det optimale antal fotontællinger lå omkring det ukonventionelle område på 1 foton detekteret pr. puls i gennemsnit, uafhængig af impulsresponsen og for en bred vifte af histogrambeholderbredder. Kredit: Videnskabelige rapporter , Doi:10.1038/s41598-018-35212-x
Koden og data anvendt af Heide et al. at generere resultaterne af undersøgelsen vil være tilgængelig på GitHub. I alt, den foreslåede probabilistiske billeddannelsesmodel og tilsvarende omvendte metoder opnåede sub-picosecond-nøjagtighed for aktiv 3D-billeddannelse, på trods af at laserpulsbredderne er større end 50 ps. Den nye metode opnåede høj præcision på tværs af et dynamisk område fra lavflux til højfluxmålinger sammenlignet med traditionelle teknikker. I fremtiden, den foreslåede metode kan lette langdistanceoptagelse ved at multiplekse flere pileup-påvirkede svar. Den foreslåede innovation baner vejen for hurtige og præcise fotoneffektive 3D-billeddannelsessystemer, hvor meget varierende fotontal observeres i praksis. Applikationer kan spænde over brede discipliner til at inkludere 3D-kortlægning og -navigation, kunstgenopbygning og konservering, autonom kørsel, vision for robotter og maskiner, geografisk information, industriel og mikroskopisk billeddannelse.
© 2018 Science X Network
 Varme artikler
Varme artikler
-
 MEMS-i-linsen-arkitektur til laserscanningsmikroskopiTOP:Indbygget 3D MEMS scanningsspejl. (a) Enheder på wafer efter frigivelsesprocessen. (b) MEMS-scanneren efter trådbinding til at understøtte PCB. NEDERST:Skematisk diagram af den konfokale billeddan
MEMS-i-linsen-arkitektur til laserscanningsmikroskopiTOP:Indbygget 3D MEMS scanningsspejl. (a) Enheder på wafer efter frigivelsesprocessen. (b) MEMS-scanneren efter trådbinding til at understøtte PCB. NEDERST:Skematisk diagram af den konfokale billeddan -
 Høj gennemsnitlig udgangseffekt opnået i PAPS fotokatodedrevlasersystemFig. 1. Layout af fotokatodedrevets lasersystem. Kredit:DOI:10.1364/OE.438199 Fotokatodedrivlaseren er en af nøgledelene i stråletestsystemet i Platform of Advanced Photon Source (PAPS). For nyl
Høj gennemsnitlig udgangseffekt opnået i PAPS fotokatodedrevlasersystemFig. 1. Layout af fotokatodedrevets lasersystem. Kredit:DOI:10.1364/OE.438199 Fotokatodedrivlaseren er en af nøgledelene i stråletestsystemet i Platform of Advanced Photon Source (PAPS). For nyl -
 Løsning af en mordsag med fysikBlodsprøjt. Kredit:University of Illinois i Chicago, Ingeniørhøjskolen I 2009 Den berømte musikproducer Phil Spector blev fundet skyldig i mordet på skuespillerinden Lana Clarkson, der blev fundet
Løsning af en mordsag med fysikBlodsprøjt. Kredit:University of Illinois i Chicago, Ingeniørhøjskolen I 2009 Den berømte musikproducer Phil Spector blev fundet skyldig i mordet på skuespillerinden Lana Clarkson, der blev fundet -
 Små kredsløb, lange afstande:Mindre lysbehandlingsenheder til fiberoptisk kommunikationKredit:CC0 Public Domain Forskere ved Michigan Tech har kortlagt en støjreducerende magneto-optisk respons, der forekommer i fiberoptisk kommunikation, åbner døren for nye materialeteknologier. O
Små kredsløb, lange afstande:Mindre lysbehandlingsenheder til fiberoptisk kommunikationKredit:CC0 Public Domain Forskere ved Michigan Tech har kortlagt en støjreducerende magneto-optisk respons, der forekommer i fiberoptisk kommunikation, åbner døren for nye materialeteknologier. O
- Daglige eksempler på situationer at anvende kvadratiske ligninger
- Realtidsobservation af kollektive kvantetilstande
- Hvad er de seks største klimaregioner?
- Hvad betyder det, når et barometer stiger eller falder?
- Tombaughs opdagelse af Pluto revolutionerede viden om vores solsystem
- Tilføjelse af strømvalg reducerer omkostninger og risiko for kulstoffri elektricitet, undersøgels…