


Forskere låser op for hemmeligheder til svømmeeffektivitet af hvaler, delfiner til næste generations undervandsrobotter
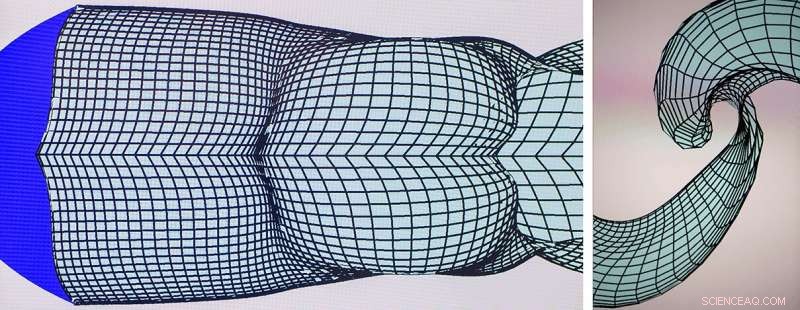
Den vågne struktur efterladt af en svømmende delfin produceret ved hjælp af en in-house fast boundary element metode numerisk ramme. Resultatet blev produceret af Lehigh PhD-studerende Fatma Ayancik. Kredit:Lehigh University
En skønne dag, undervandsrobotter kan så tæt efterligne væsner som fisk, at de vil narre ikke kun de rigtige dyr selv, men også mennesker. Den evne kunne give information lige fra fiskebestandenes sundhed til placeringen af udenlandske fartøjer.
Sådanne robotter skal være hurtige, effektiv, meget manøvredygtig, og akustisk snigende. Med andre ord, de skulle være meget som flaskenæsedelfiner eller spækhuggere.
"Vi er interesserede i at udvikle den næste generation af undervandsfartøjer, så vi forsøger at forstå, hvordan delfiner og hvaler svømmer så effektivt, som de gør, " siger Keith W. Moored, en assisterende professor i maskinteknik og mekanik i Lehigh University's P.C. Rossin College of Engineering and Applied Science. "Vi studerer, hvordan disse dyr er designet, og hvad der er gavnligt ved det design i forhold til deres svømmepræstationer, eller væskemekanikken i, hvordan de svømmer."
Moored er den primære efterforsker på et papir, der for nylig er offentliggjort i Journal of the Royal Society Interface der undersøgte væskemekanikken for hvalers fremdrift ved numerisk at simulere deres oscillerende halefinner. For første gang, Moore og hans team var i stand til at udvikle en model, der kvantitativt kunne forudsige, hvordan finnens bevægelser skulle skræddersyes til dens form for at maksimere dens effektivitet. Forskningen var en del af et større projekt støttet af Office of Naval Research under dets Multidisciplinary University Research Initiative-program. Projektet, som modtog mere end $7 millioner i finansiering (med $1 million går til Lehigh) over mere end fem år, omfattede også University of Virginia, West Chester University, Princeton University, og Harvard University.
Halefinnerne på hvaler (hvaler og delfiner) kommer i en lang række forskellige former. Den måde disse dyr bevæger deres finner på, eller deres kinematik, varierer også. Nogle hvaler kan blafre med deres finner med en større amplitude, eller hæld dem i en stejlere vinkel. Moored og hans team ønskede bedre at forstå dette samspil mellem de to variable for at bestemme, om halefinneformen var skræddersyet til et specifikt sæt kinematik.
Ved at bruge formen og kinematiske data for fem hvalarter (med almindelige navne på flaskenæsedelfiner, plettet delfin, spækhugger, falsk spækhugger, og hvidhval), de kørte simuleringer på hver af arterne for at bestemme dens fremdriftseffektivitet. Så byttede de data rundt, for eksempel, kører en simulering af finneformen af en spækhugger knyttet til en delfins kinematik.
"Vi kørte 25 af disse byttede simuleringer, og vi var virkelig overraskede, " siger Moored. "Pseudo-spækhuggerfinneformen var altid den bedste, hvilket betyder, at det var det mest effektive. Det var lige meget, hvilken kinematik vi gav den. Og hvidhvalens kinematik var altid den bedste, uanset hvilken form den var knyttet til. Det havde vi ikke forventet, så vi begyndte at grave mere i det og udviklede denne relativt forenklede model for, hvordan effektivitet skaleres med forskellige kinematiske og formvariabler."
Modellen fungerede godt til at fange de data, som Moored og hans team allerede havde genereret, så de udvidede deres datasæt for at undersøge eventuelle resulterende tendenser. De fandt ud af, at deres model ikke kun forudsagde effektivitet ud over deres datasæt, men også afslørede, at specifikke former var skræddersyet til specifik kinematik.
En interessant åbenbaring, siger Moored, var det grundlæggende samspil mellem kredsløbskræfter og tilføjede massekræfter, der bidrager til et dyrs bevægelse. Cirkulationskræfter er dem, der genererer løft, ligesom med fly.
"En hale, der blafrer op og ned, genererer kræfter ligesom et fly, men det genererer også ekstra massekræfter, der har at gøre med, hvor hurtigt væsken accelereres, " siger Moored. "Tidligere, folk troede ikke, at de tilføjede massekræfter var så relevante i svømning af hvaler. Det er slet ikke anerkendt i den tidligere litteratur. Men vi fandt ud af, at finnens accelerationer er integreret i at forudsige effektivitetstendenserne, og det var fascinerende for os. Det giver os i sidste ende en prædiktiv model, der er nøjagtig. Uden det, vi vil dybest set sige, at finneformen ikke ændrer effektiviteten, og det er ikke sandt."
At have en model, der kan forudsige ydeevne baseret på form og kinematik, giver en slags grundlæggende designligning til at bygge en undervandsrobot, der fungerer som en hval. Til dato, disse ligninger har ikke eksisteret. Og potentialet for disse maskiner er enormt. Hurtig, effektiv, og meget manøvredygtige fiskeformede robotter kunne hjælpe forskere med at teste hypoteser om, hvordan dyrene svømmer, og bedre forstå fiskestimernes adfærd. De kunne bruges til at opdage ubåde og andre undervandsfartøjer. De kunne også bruges til at overvåge virkningen af klimaændringer på bestande af fiskebestande.
Moored og hans team er allerede gået videre og udvidet deres skaleringsmodel til at tage højde for et større udvalg af variabler, som de derefter validerede med eksperimentelle data. Ultimativt, de ønsker at bygge en langt mere forudsigelig model. En, der fanger virkningerne af disse variabler, og kan derefter forudsige ydeevne for en række applikationer.
"Dette fiskesvømmeproblem er et virkelig spændende problem, fordi det er så kompliceret, " siger han. "Det er fascinerende at tage dette kaos af variabler og se orden i det, at se strukturen i det, og at forstå, hvad der grundlæggende sker."
 Varme artikler
Varme artikler
-
 Ny rekord opnået i terahertz -pulsgenereringKredit:Vienna University of Technology En gruppe forskere fra TU Wien og ETH Zürich er lykkedes i deres forsøg på at generere ultrakorte terahertz -lyspulser. Med længder på blot et par picosekund
Ny rekord opnået i terahertz -pulsgenereringKredit:Vienna University of Technology En gruppe forskere fra TU Wien og ETH Zürich er lykkedes i deres forsøg på at generere ultrakorte terahertz -lyspulser. Med længder på blot et par picosekund -
 Maskinlæring afslører skjult skildpaddemønster i kvantefyrværkeriMaskinlæringsanalyse af kvantepartikler, der skyder ud fra midten, afslører et mønster, der ligner en skildpadde. Varmere farver indikerer mere aktivitet. Kredit:Lei Feng To år siden, fysikere ved
Maskinlæring afslører skjult skildpaddemønster i kvantefyrværkeriMaskinlæringsanalyse af kvantepartikler, der skyder ud fra midten, afslører et mønster, der ligner en skildpadde. Varmere farver indikerer mere aktivitet. Kredit:Lei Feng To år siden, fysikere ved -
 Hvad er multiverset?Der er et univers. Og en anden. Og en anden ... © Mehau Kulyk/Science Photo Library/Corbis Vi taler om multiverser, så du kender øvelsen:Forestil dig, at du er dig, men i stedet for at spise et æble
Hvad er multiverset?Der er et univers. Og en anden. Og en anden ... © Mehau Kulyk/Science Photo Library/Corbis Vi taler om multiverser, så du kender øvelsen:Forestil dig, at du er dig, men i stedet for at spise et æble -
 Nye målinger afslører tegn på undvigende partikler i en nyopdaget superlederNye målinger viser tegn på tilstedeværelsen af eksotiske Majorana -partikler på overfladen af en ukonventionel superleder, Uran ditellurid. Kredit:Dr. E. Edwards, Administrerende direktør for Illi
Nye målinger afslører tegn på undvigende partikler i en nyopdaget superlederNye målinger viser tegn på tilstedeværelsen af eksotiske Majorana -partikler på overfladen af en ukonventionel superleder, Uran ditellurid. Kredit:Dr. E. Edwards, Administrerende direktør for Illi