


Oceanhitchhikers suttermekanisme giver potentiale for undervandsadhæsion

En remora. Kredit:NOAA CCMA Biogeography Team/Wikipedia
En ny undersøgelse har afsløret, hvordan remora sukkerfisk løsner sig fra de overflader, de har klamret sig til - og hvordan mekanismen kunne give inspiration til fremtidige reversible undervandsadhæsionsanordninger.
Forskningen, af en international, tværfagligt team, der arbejder på tværs af robotteknologi, sammenlignende biologi, og elektroteknik, undersøgte løsrivelsesmekanismen for remoras sugeskive, og eksperimenterede med, hvordan det kunne anvendes i undervandsrobotter.
Teamets resultater offentliggøres i IOP Publishing -tidsskriftet Bioinspiration og biomimetik .
Lederforfatter professor Li Wen, fra Beihang University, Beijing, sagde:"Havorganismer anvender hovedsageligt to adhæsionsmetoder i nedsænkede miljøer:kemisk vedhæftning og sugeadhæsion. Remoras blaffeadfærd bruger sugeadhæsion og kræver, at disse fisk både kan fastgøre og løsne regelmæssigt, men deres løsrivelse er stadig dårligt forstået.
"Forståelse af løsrivelse er afgørende for at studere biologiske klæbemiddelsystemer. Det bliver også stadig vigtigere i mange tekniske applikationer såsom overfladeafskalning (overflademaling, belægning og overførselstryk). Vi undersøgte, hvordan en remora løsner sig for at udvide forståelsen af dette biologiske system, og for at se, hvordan det kan anvendes på kunstige vedhæftningsmekanismer. "
At gøre dette, forskergruppen studerede detachment kinematik og tilhørende morfologi af levende remoras.
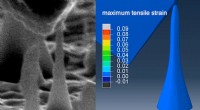
Medforfatter Dr. Dylan Wainwright, fra Museum of Comparative Zoology, Harvard Universitet, sagde:"mikro-CT-scanningsresultaterne viser, at læbemusklerne er fordelt ventralt rundt om den ydre kant af skiveputen. Sammentrækning af de forreste læberemuskler skræller skivelæben væk fra overfladen, reducere trykforskellen. "
De adskilte derefter løsrivelsesprocessen i tre faser og testede virkningerne af lamellernes bevægelse, disk fleksibilitet, og disklæbe bevægelse på klæbende ydeevne under frigørelse.
Medforfatter professor Yufeng Chen, fra Massachusetts Institute of Technology, OS., sagde:"Brug af det, vi lærte ved at observere de levende remoras, vi udviklede en biomimetisk fleksibel klæbende skive med kontrollerbar bevægelse af både skivelæben og lamellerne med spinuler.
"For at teste, om disken fungerede på samme måde som den ægte vare, vi designede og byggede en biomimetisk remora -robot med en stiv krop. Den består af fire dele:en 3-D trykt fisklignende krop, den biomimetiske sugeskive, en styreenhed og en jetfremdriftskomponent.
Den første forfatter Siqi Wang, fra Beihang University sagde:"Robotten viste lignende løsrivelsesbevægelser til dens biologiske modstykke, efterligner den tretrins løsrivelse. Hele løsrivelsesprocessen tog omkring 200 ms, hvilket er endnu hurtigere end løsrivelsen af de levende remoras (240 ms), vi optog. "
"Ved hjælp af to biomimetiske sugeskiver, robotten har både 'hitching' og 'pick and place' muligheder. Denne skalerbare evne til den biomimetiske sugeskive giver den nuværende undervandsrobot brede anvendelser, herunder langsigtet undervandstransport, arkæologi, Søg og Red, og biologisk observation.
Professor Wen sagde:"Vi håber, at denne undersøgelse vil give et vigtigt skridt i retning af den praktiske realisering af remoras sugemekanisme til virkelige applikationer."
 Varme artikler
Varme artikler
-
 Team introducerer en ny metode til at dyrke elastiske diamanterUltrastor og reversibel elastisk deformation. Kredit:MIT Diamant er det stærkeste naturligt forekommende materiale på Jorden. Den er også kendt for sin høje stivhed, enestående varmeledningsevne,
Team introducerer en ny metode til at dyrke elastiske diamanterUltrastor og reversibel elastisk deformation. Kredit:MIT Diamant er det stærkeste naturligt forekommende materiale på Jorden. Den er også kendt for sin høje stivhed, enestående varmeledningsevne, -
 Sådan bygger du et pariserhjul som et skoleprojektAt bygge et pariserhjul er en måde at vise fysik på leg. Årsagen vogne på pariserhjulet roterer rundt om aksen uden at folk i dem springer ned til jorden er et mysterium, medmindre du forstår det grun
Sådan bygger du et pariserhjul som et skoleprojektAt bygge et pariserhjul er en måde at vise fysik på leg. Årsagen vogne på pariserhjulet roterer rundt om aksen uden at folk i dem springer ned til jorden er et mysterium, medmindre du forstår det grun -
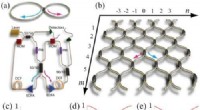 Observation af hydrodynamiske fænomener med lys via analogi mellem kvantegasser og ikke-lineær opt…Figur 1. (a) Optiske impulser, der udbreder sig i to ikke-lineære, koblede fiberløkker af lidt forskellig længde, bruges til at udforske ikke-lineær lysudvikling i (1+1)D-gitteret, vist skematisk i (b
Observation af hydrodynamiske fænomener med lys via analogi mellem kvantegasser og ikke-lineær opt…Figur 1. (a) Optiske impulser, der udbreder sig i to ikke-lineære, koblede fiberløkker af lidt forskellig længde, bruges til at udforske ikke-lineær lysudvikling i (1+1)D-gitteret, vist skematisk i (b -
 Et eksempel på en polymerforbindelseMåske kender du polymerer under deres kemiske navne, såsom polyvinylchlorid eller PVC; det er i plastrør og i Elmers Lim. Men chancerne er, at du kender dem bedre ved deres uformelle eller mærkenavne,
Et eksempel på en polymerforbindelseMåske kender du polymerer under deres kemiske navne, såsom polyvinylchlorid eller PVC; det er i plastrør og i Elmers Lim. Men chancerne er, at du kender dem bedre ved deres uformelle eller mærkenavne,
- En tilpasning 150 millioner år undervejs
- Et løst greb giver bedre kemoterapi
- Vi skal styrke miljøbeskyttelsen under tørken – eller stå over for irreversible tab
- Elektronisk aktivitet, der tidligere var usynlig for elektronmikroskoper, afsløret
- Elektronisk grafen i stort område vokser billigt
- Forskere bruger DNA-nanomaskiner til at opdage undergrupper af lysosomer