


Kaotisk måde at skabe insektlignende gangarter til robotter
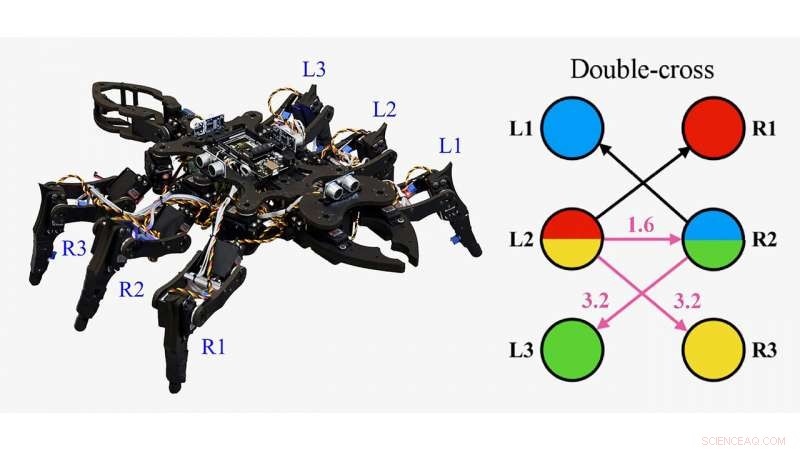
Forskere i Japan og Italien omfavner kaos og ikke-lineær fysik for at skabe insektlignende gangarter for bittesmå robotter - komplet med en bevægelseskontrol til at give en hjerne-maskine grænseflade. Udsigt over deres eksperimentelle robot og koblingsskemaer for dens gangarter. Kredit:Ludovico Minati
Forskere i Japan og Italien omfavner kaos og ikke-lineær fysik for at skabe insektlignende gangarter til bittesmå robotter-komplet med en bevægelsescontroller for at give en hjerne-maskine-grænseflade.
Biologi og fysik er gennemsyret af universelle fænomener, der er fundamentalt funderet i ikke-lineær fysik, og det inspirerede forskernes arbejde.
I journalen Kaos , gruppen beskriver brugen af Rössler-systemet, et system af tre ikke-lineære differentialligninger, som en byggesten til centrale mønstergeneratorer (CPG'er) til at kontrollere gangarten af et robotinsekt.
"De underliggende fænomeners universelle natur gjorde det muligt for os at demonstrere, at bevægelse kan opnås via elementære kombinationer af Rössler-systemer, som repræsenterer en hjørnesten i de kaotiske systemers historie, " sagde Ludovico Minati, fra Tokyo Institute of Technology og University of Trento.
Fænomener relateret til synkronisering gør det muligt for gruppen at oprette meget enkle netværk, der genererer komplekse rytmiske mønstre.
"Disse netværk, CPG'er, er grundlaget for benbevægelse overalt i naturen, " han sagde.
Forskerne startede med et minimalistisk netværk, hvor hver instans er forbundet med et ben. Ændring af gangen eller oprettelse af en ny kan opnås ved blot at foretage små ændringer i koblingen og tilhørende forsinkelser.
Med andre ord, uregelmæssigheder kan tilføjes ved at gøre individuelle systemer eller hele netværket mere kaotisk. For ikke-lineære systemer, en ændring af output er ikke proportional med en ændring af input.
Dette arbejde viser, at Rössler-systemet, ud over sine mange interessante og indviklede egenskaber, "kan også med succes bruges som et substrat til at konstruere en bioinspireret bevægelsesregulator til en insektrobot, " sagde Minati.
Deres controller er bygget med et elektroencefalogram for at muliggøre en hjerne-computer grænseflade.
"Neuroelektrisk aktivitet fra en person registreres, og ikke-lineære koncepter for fasesynkronisering bruges til at udtrække et mønster, "sagde Minati." Dette mønster bruges derefter som et grundlag for at påvirke dynamikken i Rössler -systemerne, som genererer gangmønsteret for insektrobotten."
Forskerne udnytter de grundlæggende ideer om ikke-lineær dynamik to gange.
"Først, vi bruger dem til at afkode biologisk aktivitet, derefter i den modsatte retning for at generere bioinspireret aktivitet, " han sagde.
Hovedimplikationen af dette arbejde er, at det "demonstrerer generaliteten af ikke -lineære dynamiske begreber som Rössler -systemets evne, som ofte studeres i et abstrakt scenarie, " sagde Minati, "men bruges her som grundlag for at generere biologisk plausible mønstre."
Sidste artikelMidlertidig kontrol af lysekko
Næste artikelQuantum mysteries:Søger en usædvanlig tilstand i superleder-isolatorovergangen
 Varme artikler
Varme artikler
-
 Fokus på korn, forskere løser et mysterium om flodernes strømningKredit:Yale University Når man tager en mere enkel tilgang til et komplekst problem, Yale -forskere har et svar på, hvorfor store korn bevæger sig lettere end mindre, når de drives af væskestrøm l
Fokus på korn, forskere løser et mysterium om flodernes strømningKredit:Yale University Når man tager en mere enkel tilgang til et komplekst problem, Yale -forskere har et svar på, hvorfor store korn bevæger sig lettere end mindre, når de drives af væskestrøm l -
 Sea quark -overraskelse afslører en dybere kompleksitet i proton -spin -puslespilProton -spin -puslespillet:Forskere vil vide, hvordan forskellige bestanddele i protonen bidrager til dets spin, en grundlæggende egenskab, der spiller en rolle i, hvordan disse byggesten giver anledn
Sea quark -overraskelse afslører en dybere kompleksitet i proton -spin -puslespilProton -spin -puslespillet:Forskere vil vide, hvordan forskellige bestanddele i protonen bidrager til dets spin, en grundlæggende egenskab, der spiller en rolle i, hvordan disse byggesten giver anledn -
 Mellem relativistiske og klassiske bølgeregimer, nyopdaget hukommelseseffekt ændrer Doppler -bølg…Illustration af hukommelseseffekter på bølge -stof -interaktion. Fra fig. 1, Kozlov et al., DOI:10.1117/1.AP.2.5.056003 Bølgespredning forekommer praktisk talt overalt i hverdagen - fra samtaler p
Mellem relativistiske og klassiske bølgeregimer, nyopdaget hukommelseseffekt ændrer Doppler -bølg…Illustration af hukommelseseffekter på bølge -stof -interaktion. Fra fig. 1, Kozlov et al., DOI:10.1117/1.AP.2.5.056003 Bølgespredning forekommer praktisk talt overalt i hverdagen - fra samtaler p -
 Hvordan bruges parallax til at måle afstandene til stjerner?I astronomi er parallax den nærliggende stjernes tilsyneladende bevægelse mod deres baggrund forårsaget af jordens rejse rundt om solen. Fordi tættere stjerner ser ud til at bevæge sig mere end fjerne
Hvordan bruges parallax til at måle afstandene til stjerner?I astronomi er parallax den nærliggende stjernes tilsyneladende bevægelse mod deres baggrund forårsaget af jordens rejse rundt om solen. Fordi tættere stjerner ser ud til at bevæge sig mere end fjerne
- Symbiotiske forhold i regnskoven
- Isbro i argentinsk gletsjer kollapser, ingen vidner
- Giftige PAH-luftforurenende stoffer fra fossile brændstoffer formerer sig i sollys
- Bæredygtighedsbenchmarks for plastgenbrug og redesign
- Ti år efter det enorme amerikansk olieudslip, frygten for offshore-boringer fortsætter
- Sådan rengøres biafeber