


Hvordan læres rumrobot at udføre opgave i rummet?
1. Design og udvikling:
* Formålsspecifikt design: Robotter er bygget med specifikke opgaver i tankerne. For eksempel vil en robot designet til at indsamle prøver fra en asteroide forskellige funktioner end en robot designet til at reparere en satellit.
* autonome kapaciteter: Robotter er programmeret med sofistikeret software, der gør det muligt for dem at tage beslutninger, navigere og udføre opgaver med minimal menneskelig indgriben.
* redundans og robusthed: Rummet er hårdt og utilgiveligt. Robotter er bygget med backup -systemer, afskedigelser og robuste materialer til at modstå ekstreme forhold.
2. Træning og simulering:
* Virtuelle miljøer: Robotter trænes i realistiske simuleringer, der efterligner rumbetingelserne, herunder tyngdekraft, stråling og ekstreme temperaturer.
* fysiske prototyper: Foruden virtuelle simuleringer bruges fysiske prototyper til at teste robotbevægelser, sensorfunktioner og hvordan de interagerer med objekter.
* teleoperation: I nogle tilfælde kan robotter kontrolleres eksternt af mennesker. Dette giver mulighed for en højere grad af kontrol, men øger også missionens kompleksitet.
3. Test og validering:
* jordforsøg: Robotter gennemgår omfattende test i jordbaserede faciliteter for at sikre, at de fungerer korrekt i det tilsigtede miljø.
* SpaceFlight -tests: Robotter lanceres undertiden på mindre missioner for at teste deres funktionalitet i rummet, før de bliver tildelt mere kritiske roller.
4. On-the-Job Learning:
* Adaptive algoritmer: Nogle robotter kan tilpasse deres opførsel baseret på feedback og lære af deres oplevelser.
* Dataanalyse: Robotter indsamler data fra deres miljø, der analyseres af ingeniører for at forbedre deres præstationer.
de involverede nøgleteknologier:
* kunstig intelligens (AI): Bruges til beslutningstagning, navigation og problemløsning.
* robotik: Videnskaben og teknologien til robotdesign, konstruktion, drift og anvendelse.
* Computervision: Gør det muligt for robotter at "se" og fortolke deres omgivelser.
* sensorsystemer: Giv robotter information om deres miljø, herunder temperatur, tryk og nærhed til objekter.
* Software Engineering: Udvikler softwaren, der kontrollerer og driver robotterne.
Udfordringer:
* Afstand: Kommunikation mellem jord og robotter i rummet kan blive forsinket, hvilket gør realtidskontrol udfordrende.
* hårdt miljø: Rummet udgør ekstreme miljøudfordringer som stråling, temperatursvingninger og vakuum.
* uforudsigelighed: Rummet er et dynamisk miljø, og robotter skal være i stand til at tilpasse sig uventede begivenheder.
Eksempler på rumrobotter:
* Mars Rovers (nysgerrighed, udholdenhed): Udforsk Martian -overfladen, indsamling af data og prøver.
* International Space Station (ISS) robotter: Hjælp astronauter med opgaver som vedligeholdelse og reparationer.
* Hubble Space Telescope Service Robots: Udførte reparationer og opgraderinger på Hubble -rumteleskopet.
Udvikling og træning af rumrobotter er en kompleks og løbende proces, men de potentielle fordele ved efterforskning, forskning og fremtidige menneskelige missioner i rummet er enorme.
Sidste artikelIfølge Newton hvilken styrke holdt planeterne i kredsløb?
Næste artikelBruger kugletogstoget magnetisme til at svæve?
 Varme artikler
Varme artikler
-
 Fremme af beskrivelsen af mystisk vand for at forbedre lægemiddeldesignVandmolekyle. Kredit:Naserifar og Goddard Interaktioner med vand dominerer, hvordan lægemiddelmolekyler binder sig til mål, men det er svært at modellere disse interaktioner, begrænsning af nøjagt
Fremme af beskrivelsen af mystisk vand for at forbedre lægemiddeldesignVandmolekyle. Kredit:Naserifar og Goddard Interaktioner med vand dominerer, hvordan lægemiddelmolekyler binder sig til mål, men det er svært at modellere disse interaktioner, begrænsning af nøjagt -
 Uddrag af rækkefølge fra en kvantemåling endelig vist eksperimenteltEn tynd siliciumnitridmembran (hvid) strækkes stramt hen over en siliciumramme (rød). Membranen indeholder et mønster af huller, med en lille ø i centrum, hvis vibrationer måles i forsøget. Kredit:Nie
Uddrag af rækkefølge fra en kvantemåling endelig vist eksperimenteltEn tynd siliciumnitridmembran (hvid) strækkes stramt hen over en siliciumramme (rød). Membranen indeholder et mønster af huller, med en lille ø i centrum, hvis vibrationer måles i forsøget. Kredit:Nie -
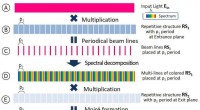 Spektral billeddannelse med superopløsning til at overvåge dynamiske processer i realtidFigur 1:Princippet for den foreslåede metode til superspektral opløsning ud over pixel Nyquist-grænser. Kredit:Osaka University Spektroskopi er studiet af samspillet mellem lys og stof, tilbyder a
Spektral billeddannelse med superopløsning til at overvåge dynamiske processer i realtidFigur 1:Princippet for den foreslåede metode til superspektral opløsning ud over pixel Nyquist-grænser. Kredit:Osaka University Spektroskopi er studiet af samspillet mellem lys og stof, tilbyder a -
 Akademikere viser, hvordan man skaber et spotlight af lyd med LEGO-lignende klodserOpsætningen til Dr. Gianluca Memolis metasurface-højttaler. Kredit:University of Sussex. Akademikere har skabt enheder, der er i stand til at manipulere lyd på samme måde som lys – hvilket skaber
Akademikere viser, hvordan man skaber et spotlight af lyd med LEGO-lignende klodserOpsætningen til Dr. Gianluca Memolis metasurface-højttaler. Kredit:University of Sussex. Akademikere har skabt enheder, der er i stand til at manipulere lyd på samme måde som lys – hvilket skaber
- Blyisotoper giver fingerpeg om, hvordan asiatisk luftforurening når Californien
- Undersøgelse viser, at Falklandsøerne kan blive kulstofnegative
- Hvilket stof krydser cellemembranen ved simpel diffusion?
- Én ud af fem australske honningprøver forfalsket
- Hvordan lagres energi i kul?
- Kilder til lactasenzymet