


Hvad er resultatet resulterende acceleration?
Her er en sammenbrud:
* Acceleration er en ændring i hastighed over tid. Det har både størrelse (hvor meget hastigheden ændres) og retning.
* resulterende acceleration Overvejer alle kræfter, der virker på et objekt og kombinerer dem til en enkelt accelerationsvektor.
Eksempel: Forestil dig en bold, der bliver kastet opad. Det har to accelerationer, der virker på det:
1. tyngdekraft: Trækker bolden nedad.
2. startkraft: Den kraft, du anvender, når du kaster bolden opad.
Den resulterende acceleration er den kombinerede virkning af disse to kræfter. Oprindeligt er den oprindelige kraft stærkere, hvilket får bolden til at bevæge sig opad. Efterhånden som bolden går højere, bliver tyngdekraften den dominerende kraft og trækker til sidst bolden tilbage.
Beregning af resulterende acceleration:
1. Identificer alle de individuelle accelerationer Handler på objektet.
2. repræsenterer hver acceleration som en vektor med størrelse og retning.
3. Tilføj vektorerne Brug af vektortilsætningsregler (head-to-hale-metode eller parallelogrammetode).
Nøglepunkter:
* Resultat -acceleration er en vektormængde, hvilket betyder, at den har både størrelse og retning.
* Retningen af den resulterende acceleration bestemmer retningen for objektets bevægelse.
* Hvis den resulterende acceleration er nul, er objektet enten i hvile eller bevæger sig med en konstant hastighed.
Fortæl mig, hvis du har andre spørgsmål!
 Varme artikler
Varme artikler
-
 Molekylære vibrationer fører til højtydende laserMolekylære vibrationer fører til højtydende laser (illustration). Kredit:Troan Tran Lasere. De bruges til alt fra at underholde vores katte til at kryptere vores kommunikation. Desværre, lasere ka
Molekylære vibrationer fører til højtydende laserMolekylære vibrationer fører til højtydende laser (illustration). Kredit:Troan Tran Lasere. De bruges til alt fra at underholde vores katte til at kryptere vores kommunikation. Desværre, lasere ka -
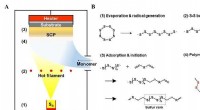 Svovlholdig polymer genererer højt brydningsindeks og gennemsigtighedEn skematisk illustration, der viser co-polymerisationen af fordampet svovl for at syntetisere den tynde film med højt brydningsindeks. Kredit:KAIST Forskere rapporterede om en ny teknologi, der
Svovlholdig polymer genererer højt brydningsindeks og gennemsigtighedEn skematisk illustration, der viser co-polymerisationen af fordampet svovl for at syntetisere den tynde film med højt brydningsindeks. Kredit:KAIST Forskere rapporterede om en ny teknologi, der -
 Forskere udvikler et metamateriale til applikationer inden for magnonics, et alternativ til konventi…Illustration. Magnonisk krystal. Kredit:@tsarcyanide / MIPT Fysikere fra Rusland og Europa har demonstreret den reelle mulighed for at bruge superleder/ferromagnet -systemer til at skabe magnonisk
Forskere udvikler et metamateriale til applikationer inden for magnonics, et alternativ til konventi…Illustration. Magnonisk krystal. Kredit:@tsarcyanide / MIPT Fysikere fra Rusland og Europa har demonstreret den reelle mulighed for at bruge superleder/ferromagnet -systemer til at skabe magnonisk -
 CERN vil bygge en større,Badder Particle Collider Dette luftfoto viser forskellen i størrelse mellem den nuværende Large Hadron Collider og den nye Future Circular Collider foreslået af fysikere på CERN. CERN Når ver
CERN vil bygge en større,Badder Particle Collider Dette luftfoto viser forskellen i størrelse mellem den nuværende Large Hadron Collider og den nye Future Circular Collider foreslået af fysikere på CERN. CERN Når ver
- Hvad er de 3 typer forurenende stoffer?
- Hvad er forskellen mellem backscatter -maskiner og millimeterbølgescannere?
- NASA ser den eks-tropiske cyklon Esther flytte tilbage til det nordlige territorium
- Hvad vil være en række projektil, hvis dets oprindelige hastighed er fordoblet?
- Hvad er Puerto store naturressourcer?
- Hvilken del af planten skaber frø