


Hvad er kriminaliteten af DOT i klassisk mekanik?
Her er en sammenbrud:
1. Lagrangian Mechanics
Lagrangian Mechanics er en stærk ramme for at beskrive systemets bevægelse. Den bruger en funktion kaldet Lagrangian , som er en funktion af systemets generaliserede koordinater (positioner) og generaliserede hastigheder (tidsderivater af positioner). Lagrangian defineres som forskellen mellem systemets kinetiske og potentielle energi:
L =t - v
2. Euler-LaGrange-ligninger
Bevægelsens ligning for et system er afledt ved hjælp af euler-lagrange-ligningerne :
d/dt (∂l/∂q̇) - ∂l/∂q =0
hvor:
* Q er en generaliseret koordinat
* Q̇ er dets tidsderivat (generaliseret hastighed)
* ∂/∂q repræsenterer delvis differentiering med hensyn til q
* ∂/∂q̇ repræsenterer delvis differentiering med hensyn til Q̇
3. Annullering af dot
I nogle situationer kan Lagrangian skrives i en form, der giver mulighed for en forenkling. For eksempel, hvis Lagrangian kun afhænger af de generaliserede hastigheder, der er firkantet (Q̇²) og ikke direkte på hastighederne selv (Q̇), forenkler Euler-Lagrange-ligningerne.
Denne forenkling opstår, fordi derivatet med hensyn til Q̇ (∂L/∂q̇) vil involvere en faktor på 2Q̇, der annullerer Q̇ i tidsderivatet (D/DT). Dette efterlader kun udtryk, der involverer det andet derivat af Q (Q̈), som er accelerationen.
Eksempel:
Overvej en simpel harmonisk oscillator med potentiel energi V =(1/2) kx² og kinetisk energi t =(1/2) MQ ². Lagrangian er:
L =T - V =(1/2) MQ̇² - (1/2) KX²
Anvendelse af Euler-Lagrange-ligningen:
d/dt (∂l/∂q̇) - ∂l/∂q =0
D/DT (MQ̇) + KX =0
MQ̈ + KX =0
Dette er den velkendte bevægelsesligning for en simpel harmonisk oscillator. Bemærk, hvordan DOT (Q̇) annullerer under afledningen.
Kortfattet:
* ”Annullering af DOT” henviser til en forenkling, der forekommer i Lagrangian mekanik, når Lagrangian kun afhænger af firkanterne af generaliserede hastigheder.
* Denne forenkling fører til mere ligetil bevægelsesligninger og kan være særlig nyttige til systemer med enkle kinetiske energiudtryk.
Du er velkommen til at spørge, om du har yderligere spørgsmål!
 Varme artikler
Varme artikler
-
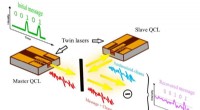 Forskere foreslår brugen af kvantekaskadelasere for at opnå privat kommunikation i frit rumEksperimentel opsætning til privat kommunikation baseret på QCLs kaossynkronisering. Kredit:Spitz et al. Frirum optisk kommunikation, kommunikationen mellem to enheder på afstand ved hjælp af lys
Forskere foreslår brugen af kvantekaskadelasere for at opnå privat kommunikation i frit rumEksperimentel opsætning til privat kommunikation baseret på QCLs kaossynkronisering. Kredit:Spitz et al. Frirum optisk kommunikation, kommunikationen mellem to enheder på afstand ved hjælp af lys -
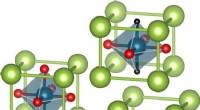 Superledningsevne:Dens brintfejlNår brint er inkorporeret i nikkelatstrukturen, det er ikke en superleder. Kredit:TU Wien Nickelate Sidste sommer, der blev udråbt en ny tidsalder for høj temperatur superledelse-nikkelalderen. De
Superledningsevne:Dens brintfejlNår brint er inkorporeret i nikkelatstrukturen, det er ikke en superleder. Kredit:TU Wien Nickelate Sidste sommer, der blev udråbt en ny tidsalder for høj temperatur superledelse-nikkelalderen. De -
 Lokalisering af en skytte fra det første skud via mobiltelefonKredit:CC0 Public Domain I de sidste årtier har militærer har arbejdet hårdt på at udvikle teknologier, der samtidig beskytter infanterisoldaters hørelse og hjælp i slagmarkskommunikation. Imidler
Lokalisering af en skytte fra det første skud via mobiltelefonKredit:CC0 Public Domain I de sidste årtier har militærer har arbejdet hårdt på at udvikle teknologier, der samtidig beskytter infanterisoldaters hørelse og hjælp i slagmarkskommunikation. Imidler -
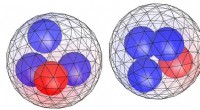 Forståelse af sjældne jordarters emulsionerIoner inde i vanddråber. Kredit:Northwestern University På trods af deres navn, sjældne jordarters elementer er faktisk ikke så sjældne. Rigelig i miner rundt om i verden, sjældne jordarter bruges
Forståelse af sjældne jordarters emulsionerIoner inde i vanddråber. Kredit:Northwestern University På trods af deres navn, sjældne jordarters elementer er faktisk ikke så sjældne. Rigelig i miner rundt om i verden, sjældne jordarter bruges
- Hvor mange vigtigste landområder har Iowa?
- Columbia leder indsatsen for at udvikle en kvantesimulator
- Videostjerner:Russiske børnebloggere scorer millioner af likes
- Hvorfor spiser vi på Science Lab?
- Social eksklusion mere almindelig form for mobning end fysisk, verbal aggression
- Hvilken forholdsregel skal følges ved forberedelse af fortyndet syreopløsning?