


Programmerbare bløde aktuatorer viser det store potentiale i blød robotik
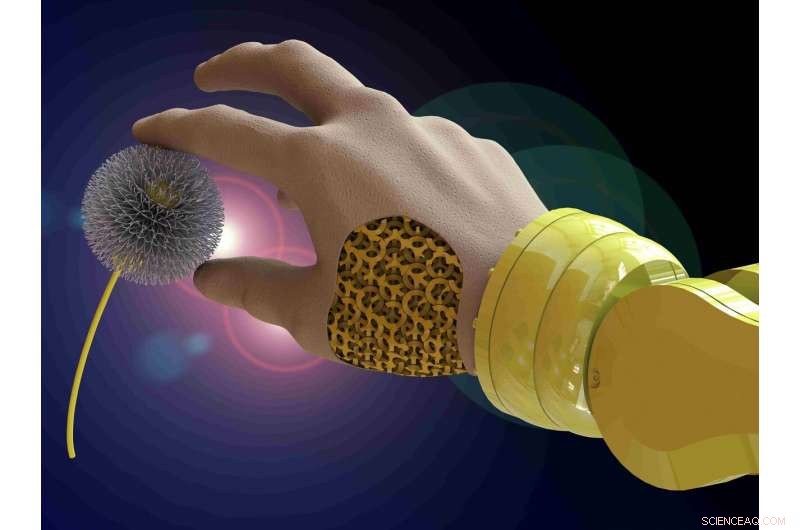
Forskere udvikler bløde aktuatorer, der vil give robotter en blød touch. Kredit:Delft University of Technology
Forskere ved TU Delft har udviklet meget programmerbare aktuatorer, der bl. ligner den menneskelige hånd, kombinere bløde og hårde materialer for at udføre komplekse bevægelser. Disse materialer har et stort potentiale for bløde robotter, der sikkert og effektivt kan interagere med mennesker og andre sarte genstande. Forskerne rapporterer om deres arbejde i Materialer Horisonter i nummeret af 8. juli.
Blød
"Robotter er normalt store og tunge. Men man vil også have robotter, der kan agere skånsomt, for eksempel ved håndtering af blødt væv inde i menneskekroppen. Det felt, der studerer dette spørgsmål, blød robotik, nu for alvor tager fart, " siger prof. Amir Zadpoor, der overvågede forskningen præsenteret i Materialer Horisonter .
"Hvad du virkelig ønsker, er noget, der ligner den menneskelige hånds træk, herunder blød berøring, hurtige men præcise bevægelser, og magt. Og det er, hvad vores bløde 3-D-printede programmerbare materialer stræber efter at opnå.
Afstembarhed
På grund af deres bløde berøring, blød robotik kan sikkert og effektivt interagere med mennesker og andre sarte genstande. Bløde programmerbare mekanismer er nødvendige for at drive denne nye generation af robotter. Fleksible mekaniske metamaterialer, der arbejder på basis af mekanisk ustabilitet, tilbyder hidtil usete funktionaliteter programmeret ind i deres arkitektonerede stof, der gør dem potentielt meget lovende som bløde mekanismer. "Imidlertid, tunbarheden af de mekaniske metamaterialer, der hidtil er foreslået, har været meget begrænset, " siger forsker og førsteforfatter Shahram Janbaz.
Programmerbar
"Vi præsenterer nu nogle nye designs af ultra-programmerbare mekaniske metamaterialer, hvor ikke kun aktiveringskraften og amplituden, men også aktiveringstilstanden kunne vælges og tunes inden for et meget bredt område. Vi viser også nogle eksempler på, hvordan disse bløde aktuatorer kunne bruges inden for robotteknologi, for eksempel som en kraftafbryder, kinematiske controllere, og en pick-and-place end-effektor, " siger Janbaz.
Knækning
"Funktionen er allerede indarbejdet i materialet, " forklarer Zadpoor. "Derfor, vi måtte se dybere på fænomenet buckling. Dette blev engang betragtet som indbegrebet af designfejl, men er blevet udnyttet i løbet af de sidste par år til at udvikle mekaniske metamaterialer med avancerede funktionaliteter. Blød robotik i almindelighed og bløde aktuatorer i særdeleshed kunne have stor gavn af sådanne designermaterialer. At frigøre det store potentiale ved knækningsdrevne materialer er, imidlertid, betinget af at løse hovedbegrænsningen af de designs, der er præsenteret til dato, nemlig den begrænsede rækkevidde af deres programmerbarhed. Vi var i stand til at beregne og forudsige højere former for knækning og gøre materialet disponeret for disse højere tilstande."

En konventionel robotarm er modificeret ved hjælp af de udviklede bløde aktuatorer for at give soft touch under pick-and-place-opgaver. Kredit:Delft University of Technology
3-D print
"Så, vi præsenterer multi-materiale knæk-drevne metamaterialer med høje niveauer af programmerbarhed, " siger Janbaz. "Vi kombinerede rationelle designtilgange baseret på forudsigelige beregningsmodeller med avancerede multimateriale additive fremstillingsteknikker til 3-D-print af cellulære materialer med vilkårlige fordelinger af bløde og hårde materialer i de centrale og hjørnedele af deres enhedsceller. Ved at bruge geometrien og den rumlige fordeling af materialeegenskaber som de vigtigste designparametre, vi udviklede bløde mekaniske metamaterialer, der opførte sig som mekanismer, hvis aktiveringskraft og aktiveringsamplitude kunne justeres."
Sidste artikelSådan opdager du nye materialer hurtigt
Næste artikelNanoporøst materiale samler forurening fra vand
 Varme artikler
Varme artikler
-
 En fantastisk molekylær maskineDe adaptive iridocytter i huden på den californiske markedsblæksprutte er i stand til at indstille farven gennem det meste af spektret. Kredit:University of California - Santa Barbara blæksprutter
En fantastisk molekylær maskineDe adaptive iridocytter i huden på den californiske markedsblæksprutte er i stand til at indstille farven gennem det meste af spektret. Kredit:University of California - Santa Barbara blæksprutter -
 Forskere hjælper med at udvikle bæredygtige polymererUndersøgelsen af Rufina Alamo og den tidligere doktorand Xiaoshi Zhang blev vist på forsiden af Macromolecules. Alamo og Zhang designede illustrationen, og Zhang tegnede det. Kredit:Xiaoshi Zhang
Forskere hjælper med at udvikle bæredygtige polymererUndersøgelsen af Rufina Alamo og den tidligere doktorand Xiaoshi Zhang blev vist på forsiden af Macromolecules. Alamo og Zhang designede illustrationen, og Zhang tegnede det. Kredit:Xiaoshi Zhang -
 Nye mekanismer fundet til at adskille luftmolekylerFunktionel gruppeflappemekanisme i et lille nanowindow, som kan være i åben eller lukket status for at tillade O2 -gennemtrængning. Kredit:2018, Naturkommunikation , Licenseret under CC BY 4.0 N
Nye mekanismer fundet til at adskille luftmolekylerFunktionel gruppeflappemekanisme i et lille nanowindow, som kan være i åben eller lukket status for at tillade O2 -gennemtrængning. Kredit:2018, Naturkommunikation , Licenseret under CC BY 4.0 N -
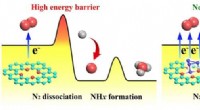 Opnåelse af højeffektiv ammoniaksyntese ved at ændre det hastighedsbestemmende trinSkematisk illustration af ændring af det hastighedsbestemmende trin i nitrogenreduktionsreaktionen ved at indføre kobolt-enkeltklynge i katalysatoren. Den cyan, rød, lilla, og grå kugler repræsenterer
Opnåelse af højeffektiv ammoniaksyntese ved at ændre det hastighedsbestemmende trinSkematisk illustration af ændring af det hastighedsbestemmende trin i nitrogenreduktionsreaktionen ved at indføre kobolt-enkeltklynge i katalysatoren. Den cyan, rød, lilla, og grå kugler repræsenterer
- BMW tilbagekalder 360, 000 Kina biler over Takata airbags
- Ny mobil enhed identificerer luftbårne allergener ved hjælp af dyb læring
- Astronomer udpeger det bedste sted på Jorden for et teleskop:Højt på et koldt antarktisk plateau
- Sådan beregnes perimeter og arealforhold
- Håndvaskrobot hjælper skolebørn med at gøre et rent brud med dårlige vaner
- Forskere finder, at enzymer naturligt vælger deres egne polymersekvenser