


Ny fysiklov hjælper mennesker og robotter med at forstå friktionen ved berøring

Forskere har nu beskrevet en ny fysiklov, der forklarer elastohydrodynamisk smøring (EHL) friktion, som skulle fremme en bred vifte af robotteknologier. EHL-friktion opstår, når to faste overflader kommer i kontakt med et tyndt lag væske mellem dem. Kredit:Lilian Hsiao
Selvom robotudstyr bruges i alt fra samlebånd til medicin, ingeniører har svært ved at redegøre for den friktion, der opstår, når disse robotter griber genstande - især i våde omgivelser. Forskere har nu opdaget en ny fysiklov, der forklarer denne type friktion, som skulle fremme en bred vifte af robotteknologier.
"Vores arbejde her åbner døren til at skabe mere pålidelige og funktionelle haptiske og robotiske enheder i applikationer som telekirurgi og fremstilling, " siger Lilian Hsiao, en assisterende professor i kemisk og biomolekylær teknik ved North Carolina State University og tilsvarende forfatter til et papir om arbejdet.
Det drejer sig om noget, der kaldes elastohydrodynamisk smøring (EHL) friktion, som er den friktion, der opstår, når to faste overflader kommer i kontakt med et tyndt lag væske mellem dem. Dette vil omfatte den friktion, der opstår, når du gnider fingerspidserne sammen, hvor væsken er det tynde lag af naturligt forekommende olie på din hud. Men det kan også gælde for en robotklo, der løfter en genstand, der er blevet belagt med olie, eller til et kirurgisk udstyr, der bliver brugt inde i den menneskelige krop.
En af grundene til, at friktion er vigtig, er, at den hjælper os med at holde ting uden at tabe dem.
"Det er intuitivt for mennesker at forstå friktion - selv når vi håndterer sæbeskåle, "Hsiao siger. "Men det er ekstremt svært at tage højde for EHL-friktion, når man udvikler materialer, der styrer gribeevner i robotter."
At udvikle materialer, der hjælper med at kontrollere EHL-friktion, ingeniører har brug for en ramme, der kan anvendes ensartet på en lang række mønstre, materialer og dynamiske driftsforhold. Og det er netop, hvad forskerne har opdaget.
"Denne lov kan bruges til at redegøre for EHL-friktion, og kan anvendes på mange forskellige bløde systemer - så længe objekternes overflader er mønstrede, " siger Hsiao.
I denne sammenhæng, overflademønstre kan være alt fra de let hævede overflader på spidsen af vores fingre til riller i overfladen af et robotværktøj.
Det nye fysiske princip, udviklet i fællesskab af Hsiao og hendes kandidatstuderende Yunhu Peng, gør brug af fire ligninger til at redegøre for alle de fysiske kræfter, der er i spil for at forstå EHL-friktion. I avisen, forskerholdet demonstrerede loven i tre systemer:menneskelige fingre; en bio-inspireret robot fingerspids; og et værktøj kaldet et tribo-rheometer, som bruges til at måle friktionskræfter. Peng er førsteforfatter af papiret.
"Disse resultater er meget nyttige i robothænder, der har mere nuancerede kontroller til pålidelig håndtering af fremstillingsprocesser, " siger Hsiao. "Og det har åbenlyse anvendelser inden for telekirurgi, hvor kirurger fjernstyrer robotudstyr til at udføre kirurgiske procedurer. Vi ser dette som et fundamentalt fremskridt for at forstå berøring og for at kontrollere berøring i syntetiske systemer."
Papiret, "Elastohydrodynamisk friktion af robot- og menneskefingre på bløde mikromønstrede substrater, " er offentliggjort i Naturmaterialer .
Sidste artikelForskere rapporterer omvendt magnesiumkemi opdagelse
Næste artikelElektronstrålesmeltning får skørt metal i form
 Varme artikler
Varme artikler
-
 Forskere finder en billigere måde at oplyse OLED-skærme påKemiker Mark E. Thompson har nye kobberbaserede lysdioder opfundet af ham og et team af kemikere, der kunne være en billigere løsning for tv- og smartphone-skærme til at producere farven-herunder blå-
Forskere finder en billigere måde at oplyse OLED-skærme påKemiker Mark E. Thompson har nye kobberbaserede lysdioder opfundet af ham og et team af kemikere, der kunne være en billigere løsning for tv- og smartphone-skærme til at producere farven-herunder blå- -
 En hydrogel, der kan stoppe blødning fra en arterieKredit:CC0 Public Domain Et team af forskere tilknyttet flere institutioner i Kina har udviklet en hydrogel, der kan stoppe blødninger fra en punkteret arterie. I deres papir offentliggjort i tids
En hydrogel, der kan stoppe blødning fra en arterieKredit:CC0 Public Domain Et team af forskere tilknyttet flere institutioner i Kina har udviklet en hydrogel, der kan stoppe blødninger fra en punkteret arterie. I deres papir offentliggjort i tids -
 At belyse, hvordan asymmetri giver kemiske egenskaberKredit:CC0 Public Domain Du har hørt udtrykket form følger funktion? I materialevidenskab, funktion følger form. Ny forskning af Carnegies Olivier Gagné og samarbejdspartner Frank Hawthorne fra U
At belyse, hvordan asymmetri giver kemiske egenskaberKredit:CC0 Public Domain Du har hørt udtrykket form følger funktion? I materialevidenskab, funktion følger form. Ny forskning af Carnegies Olivier Gagné og samarbejdspartner Frank Hawthorne fra U -
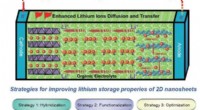 Regulering af todimensionelle nanomaterialer til lithium-ion-batterierStrategier til forbedring af lithiumlagringsegenskaberne for 2D nanoark. Kredit:©Science China Press Li-ion-batterier (LIBer) er fordelagtige energilagringsenheder på grund af deres højere specifi
Regulering af todimensionelle nanomaterialer til lithium-ion-batterierStrategier til forbedring af lithiumlagringsegenskaberne for 2D nanoark. Kredit:©Science China Press Li-ion-batterier (LIBer) er fordelagtige energilagringsenheder på grund af deres højere specifi
- Meteoritter giver spor til solsystemernes oprindelse
- Ny pulserende magnet afslører en ny tilstand i Kondo -isolatoren
- Sonys overskud stiger næsten syvdoblet til $ 4,5 mia
- Leder efter raketvidenskab på uventede steder
- Ny billeddannelsesteknik afslører, hvordan mekanisk skade begynder på molekylær skala
- Ny røntgenoptik øger billeddannelsesegenskaberne ved NSLS-II