


Biologisk inspirerede kunstige muskler lavet af motoriske proteiner
Inde i vores celler, og de af de mest kendte livsformer, eksisterer en række komplekse forbindelser kendt som "molekylære motorer." Disse biologiske maskiner er essentielle for forskellige typer bevægelser i levende systemer, fra den mikroskopiske omlejring eller transport af proteiner i en enkelt celle til den makroskopiske kontraktion af muskelvæv. I krydsfeltet mellem robotteknologi og nanoteknologi, et mål, der er meget eftertragtet, er at finde måder at udnytte virkningen af disse små molekylære motorer til at udføre større opgaver på en kontrollerbar måde. Imidlertid, at nå dette mål vil helt sikkert være en udfordring.
"Indtil nu, selvom forskere har fundet måder at opskalere den kollektive handling af molekylære motoriske netværk for at vise makroskopisk sammentrækning, det er stadig vanskeligt at integrere sådanne netværk effektivt i faktiske maskiner og generere kræfter, der er store nok til at aktivere komponenter i makroskala, " forklarer lektor Yuichi Hiratsuka fra Japan Advanced Institute of Science and Technology, Japan.
Heldigvis, Dr. Hiratsuka, i samarbejde med lektor Takahiro Nitta fra Gifu University og professor Keisuke Morishima fra Osaka University, både i Japan, har for nylig gjort bemærkelsesværdige fremskridt i søgen efter at bygge bro mellem mikroen og makroen. I deres seneste undersøgelse offentliggjort i Naturmaterialer , dette forskerhold rapporterede designet af en ny type aktuator drevet af to genetisk modificerede biomolekylære motorer. Et af de mest attraktive aspekter af deres biologisk inspirerede tilgang er, at aktuatoren selv samler sig fra de grundlæggende proteiner ved simpel lysbestråling. I løbet af få sekunder efter, at lys rammer et givet område, de omgivende motoriske proteiner smelter sammen med skinnelignende proteiner kaldet mikrotubuli og arrangerer sig selv i en hierarkisk makroskopisk struktur, der ligner muskelfibre.
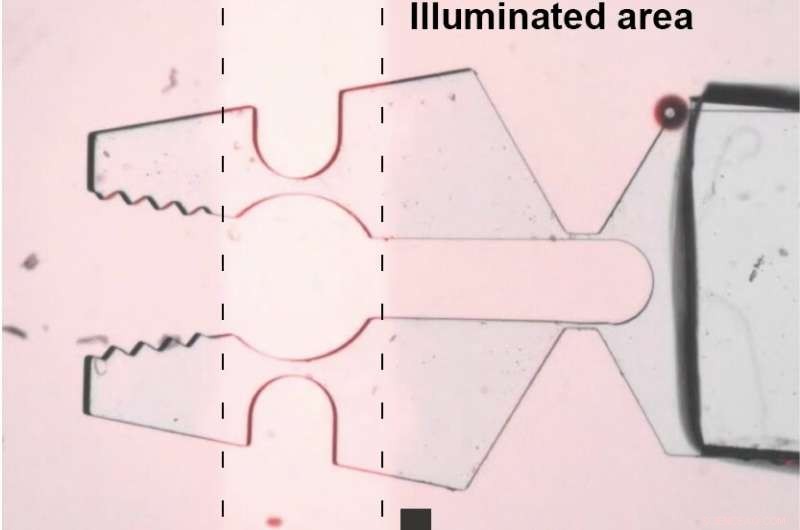
Ved formation omkring målzonen (belyst) denne "kunstige muskel" trækker sig straks sammen, og den kollektive kraft af de enkelte motorproteiner amplificeres fra en molekylær skala til en millimeter. Som forskerne viste eksperimentelt, deres tilgang kunne være ideel til små robotapplikationer, såsom aktivering af mikroskopiske gribere til at håndtere biologiske prøver (figur 1). Andre applikationer i millimeterskala, der også er demonstreret, omfatter sammenføjning af separate komponenter, såsom miniaturetandhjul, og driver minimalistiske robotarme til at lave en insektlignende kravlende mikrorobot.
Hvad der også er meget bemærkelsesværdigt ved denne teknik er, at den er kompatibel med eksisterende 3D-printteknikker, der bruger lys, såsom stereolitografi. Med andre ord, mikrorobotter med indbyggede kunstige muskler kan være 3D-printbare, muliggør deres masseproduktion og dermed øger deres anvendelighed til at løse forskellige problemer. "I fremtiden, vores printbare aktuator kan blive det tiltrængte 'aktuatorblæk' til sømløs 3D-print af hele robotter. Vi mener, at et sådant biomolekyle-baseret blæk kan skubbe grænsen for robotteknologi frem ved at muliggøre udskrivning af komplekse knogle- og muskelkomponenter, der er nødvendige for, at robotter yderligere kan ligne levende væsner, " siger Dr. Hiratsuka.
En potentiel forbedring af den nuværende teknik ville være at finde måder til effektivt at trække de kunstige muskler fra (reversibilitet). Alternativt den nuværende strategi kunne også ændres for at producere spontan oscillerende adfærd i stedet for kontraktion, som det observeres i mikrobers mobile cilia eller i insektflugtmuskler.
I hvert fald denne undersøgelse viser effektivt, hvordan efterligning af de strategier, som naturen har fundet på, ofte er en opskrift på succes, som mange forskere inden for robotteknologi allerede har fundet ud af.
 Varme artikler
Varme artikler
-
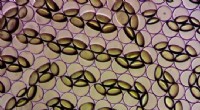 Spinout søger at omdanne test af fødevaresikkerhedJanus-emulsionsdråber fanges i færd med at ændre form som reaktion på tilstedeværelsen af forurening med et fødevarepatogen i et laboratoriemiljø. Emulsionerne kan ses med det blotte øje og, ved hjæ
Spinout søger at omdanne test af fødevaresikkerhedJanus-emulsionsdråber fanges i færd med at ændre form som reaktion på tilstedeværelsen af forurening med et fødevarepatogen i et laboratoriemiljø. Emulsionerne kan ses med det blotte øje og, ved hjæ -
 Illinois ingeniør fortsætter med at lave bølger i vandafsaltningAdjunkt Kyle Smith. Kredit:University of Illinois. I de sidste mange år, University of Illinois-forsker Kyle Smith har bevist sin voksende ekspertise inden for vandafsaltning, med en række forskni
Illinois ingeniør fortsætter med at lave bølger i vandafsaltningAdjunkt Kyle Smith. Kredit:University of Illinois. I de sidste mange år, University of Illinois-forsker Kyle Smith har bevist sin voksende ekspertise inden for vandafsaltning, med en række forskni -
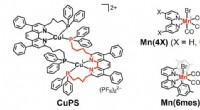 Store fremskridt for kulstoffangst ved hjælp af jordrige elementer som fotokatalytisk systemStrukturen af CuPS, kobberkomplekset, der opfører sig som en redox -lysfølsomhed, og den manganbaserede katalysator udviklet i undersøgelsen. Kredit: Journal of the American Chemical Society Fo
Store fremskridt for kulstoffangst ved hjælp af jordrige elementer som fotokatalytisk systemStrukturen af CuPS, kobberkomplekset, der opfører sig som en redox -lysfølsomhed, og den manganbaserede katalysator udviklet i undersøgelsen. Kredit: Journal of the American Chemical Society Fo -
 Ny immunterapiteknik kan specifikt målrette tumorceller, undersøgelsesrapporterDenne teknologi er særligt spændende, fordi den afmonterer store udfordringer inden for kræftbehandlinger, ” siger Weian Zhao. Kredit:Steve Zylius / UCI En ny immunterapi screening prototype udvik
Ny immunterapiteknik kan specifikt målrette tumorceller, undersøgelsesrapporterDenne teknologi er særligt spændende, fordi den afmonterer store udfordringer inden for kræftbehandlinger, ” siger Weian Zhao. Kredit:Steve Zylius / UCI En ny immunterapi screening prototype udvik
- Afdækning af designprincipperne for cellulære rum
- Elektroner i kvantevæske får energi fra laserpulser
- Tidligere Intel-chef Brian Krzanich skal lede CDK Global
- Spørgsmål og svar:Er jagt med blyammunition til fare for mennesker, miljømæssig sundhed?
- Kina bakker op om, at Huawei ikke skal være stille lam i amerikansk juridisk kamp
- "The Silverback Gorillas Diet