


Molekylær switch muliggør fotomekanisk spring af polymerer
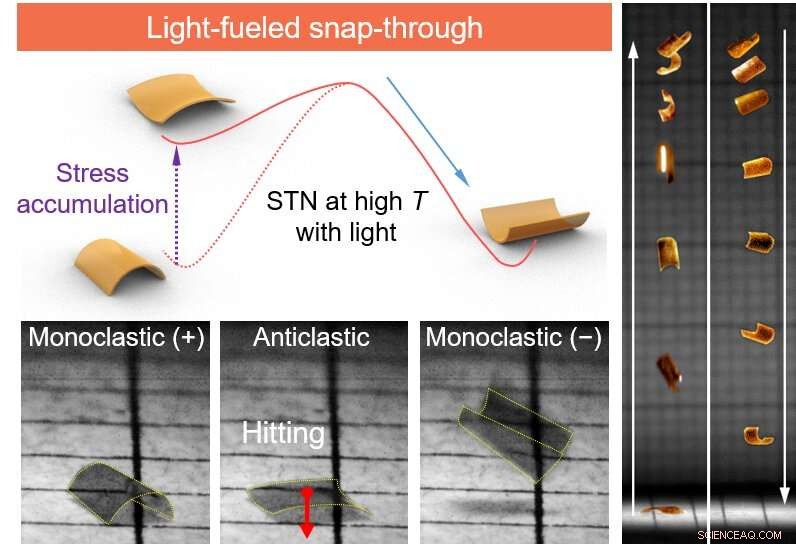
Den foto-inducerede bi-stabile struktur gør det muligt for den fotoaktive flydende krystallinske polymer at opnå snap-through inspireret spring. Effektiv fotoinduceret energiakkumulering og frigivelse induceres af 270° supersnoet nematisk geometri af fotoaktive molekyler. Kredit:Inha University
Hoppebevægelse er almindeligt observeret i naturen, herunder for pattedyr, insekter og de andre landskaber; denne flydende bevægelse sigter mod hurtig mobilitet, en hurtigere ankomsttid til en destination over store forhindringer og ujævnt terræn. Springets kvalitative egenskaber, såsom retning og højde, reguleres kun af brøkdele af potentiel og kinetisk energi. Ud over, en organisme kan vælge at gentage sine hoppebevægelser som bestemt af sin egen frie vilje.
For at implementere en lignende type springadfærd i robotsystemer, der skal være skræddersyede designs, der genererer en øjeblikkelig energioverførsel til et substrat med tilstrækkelig akkumuleret energi. Mange af de nuværende springrobotter i marken tilpasser sig ved at sparke eller skubbe til underlagene med deres ben; dette er almindeligvis drevet af motoriserede aktuatorer eller batteridrevne systemer. Imidlertid, disse systemer tilføjer uønsket vægt til de hoppende robotter og er også svære at fastgøre på en miniaturiseret krop.
En fotoaktiv flydende krystallinsk polymer er i stand til at springe bevægelse, fordi den fotoaktive molekylære maskines anisotrope fotomekaniske respons gør det muligt for den flydende krystallinske polymer at akkumulere og frigive foto-induceret energi effektivt. Den fotoaktive molekylære maskine, en azobenzendel, er justeret med flydende krystalmolekyler, der giver retningsbestemt foto-induceret kontraktion fra fotoisomerisering af azobenzen. 270° supersnoet nematisk molekylær geometri i toppen og bunden af den fotoaktive flydende krystallinske polymer inducerer en ikke-isometrisk bistabil tilstand under aktinisk lysbestråling med samtidig opvarmning. Den bistabile struktur er kendt for at akkumulere energi under energibarrieren for at deformere mellem to stabile strukturer. Under deformationsprocessen, den akkumulerede energi begynder at overskride energibarrieren og fortsætter til en øjeblikkelig frigivelse, den såkaldte 'snap-through'. Øjeblikkelig energifrigivelse i fotoaktiv flydende krystallinsk polymer genererer den hoppende bevægelse gennem stød med substratet. Bemærkelsesværdigt, den maksimale springhøjde når 15,5 kropslængder med den maksimale øjeblikkelige hastighed på 880 BL s -1 .
En formidabel udfordring for en springrobot er on-demand kontinuerlig hop. I modsætning til motoriserede hopperobotter, det er vanskeligt at implementere kontinuerligt eller retningsbestemt spring for en springrobot med en monolitisk krop, da vinklen mellem robotten og aktiveringskilden ændres kontinuerligt. Den tovejs lysbestråling gør det muligt for den fotoaktive flydende krystallinske polymer at hoppe kontinuerligt på to forskellige måder:slag og spark baseret fotomekanisk hop. Uanset landingsretningen eller krumningen af den bløde robot, on-demand lysbestråling fra top eller bund sørger for hoppebevægelser i bløde robotter.
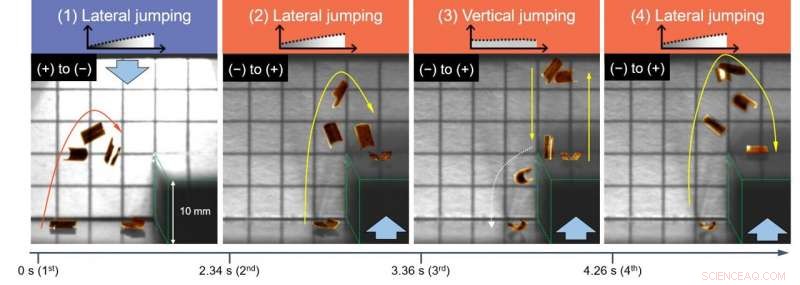
Den guidede rejse af fotoaktiv flydende krystallinsk polymer med mønstret lys (en fra toppen og en anden fra bunden) til ankomst til destinationen inden for få sekunder. Kredit:Inha University
Derudover det fotomekaniske spring kan styres ved at generere en stråleintensitetsgradient. Gradientlysintensiteten bryder symmetrien af fotoisomerisering i en monolitisk fotoaktiv flydende krystallinsk polymer, som genererer retningsbestemt kinetisk energi. Ved at kombinere tovejs lysbestråling med en stråleintensitetsgradient, den miniaturiserede fotoaktive flydende krystallinske polymer kan nå frem til sin destination, selv overvinde store forhindringer.
Denne hidtil usete strategi vil give indsigt i kontaktløs springmanøvredygtighed i miniaturiserede bløde robotter.
 Varme artikler
Varme artikler
-
 Discovery peger på vejen til bedre og billigere transparente ledereKompensation af acceptor fluorinterstitialer (lysegrøn) reducerer dramatisk elektronisk ydeevne af tindioxid gennemsigtige ledende glasbelægninger dopet med fluoratomer (mørkegrønne). Kredit:Universit
Discovery peger på vejen til bedre og billigere transparente ledereKompensation af acceptor fluorinterstitialer (lysegrøn) reducerer dramatisk elektronisk ydeevne af tindioxid gennemsigtige ledende glasbelægninger dopet med fluoratomer (mørkegrønne). Kredit:Universit -
 Nye funktionelle biokul-kompositter hjælper med at behandle spildevandDiagram over fremstillingsprocessen og mekanismen for FBCer. Kredit:GAO Yujie Et team ledet af prof. Wu Zhengyan fra Hefei Institutes of Physical Science ved det kinesiske videnskabsakademi (CAS)
Nye funktionelle biokul-kompositter hjælper med at behandle spildevandDiagram over fremstillingsprocessen og mekanismen for FBCer. Kredit:GAO Yujie Et team ledet af prof. Wu Zhengyan fra Hefei Institutes of Physical Science ved det kinesiske videnskabsakademi (CAS) -
 Mine efter guld med en computerDisse billeder viser nogle af de fysiske egenskaber ved nanoporøst guld ved forskellige forstørrelser. Kredit:Texas A&M University Ingeniører fra Texas A&M University og Virginia Tech rapporterer
Mine efter guld med en computerDisse billeder viser nogle af de fysiske egenskaber ved nanoporøst guld ved forskellige forstørrelser. Kredit:Texas A&M University Ingeniører fra Texas A&M University og Virginia Tech rapporterer -
 Naturinspirerede materialer kan bruges i applikationer lige fra tunneling til rumOptisk billede af materialeoverflade efter erosionstest med hastighed på 30 m/s og anslagsvinkel på 30 grader. Kredit:Rahul Kumar Optimale materialer til skærende værktøjer til tunnelboremaskiner
Naturinspirerede materialer kan bruges i applikationer lige fra tunneling til rumOptisk billede af materialeoverflade efter erosionstest med hastighed på 30 m/s og anslagsvinkel på 30 grader. Kredit:Rahul Kumar Optimale materialer til skærende værktøjer til tunnelboremaskiner
- Hvor vil det næste problem med fødevareproduktion opstå?
- Arizona-kløften berømt for, at vandfald åbner igen efter oversvømmelser
- Et videnskabsprojekt om, hvad slags juice der rydder Pennies Best
- Vaccinedesign kan dramatisk forbedre kræftimmunoterapier
- Forskere observerer, hvad der kunne være de første antydninger af mørke bosoner
- En saltopløsning til afsaltning af saltlage