


En DNA -nanorobot er programmeret til at opfange og sortere molekyler i foruddefinerede områder
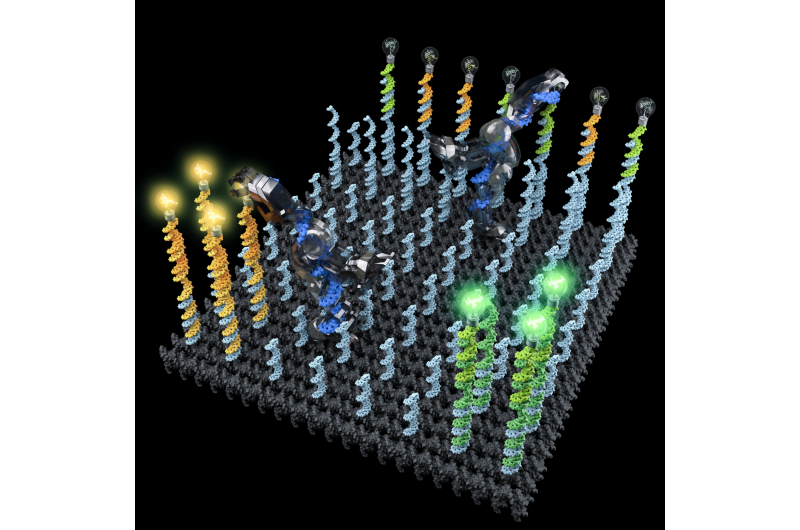
Konceptuel illustration af to DNA-robotter, der samlet udfører en lastsorteringsopgave på en DNA-origami-overflade, transport af fluorescerende molekyler med forskellige farver fra oprindeligt uordnede steder til adskilte destinationer. Der er taget betydelig kunstnerisk licens. Kredit:Demin Liu
Forestil dig en robot, der kan hjælpe dig med at rydde op i dit hjem:roer rundt, sortering af herreløse strømper i vasketøjet og snavsede tallerkener i opvaskemaskinen. Selvom en sådan praktisk hjælper stadig kan være science fiction, Caltech -forskere har udviklet en autonom molekylær maskine, der kan udføre lignende opgaver - på nanoskalaen. Denne "robot, "lavet af en enkelt streng af DNA, kan autonomt "gå" rundt på en overflade, afhent visse molekyler og aflever dem på bestemte steder.
Arbejdet blev udført i laboratoriet i Lulu Qian, adjunkt i bioingeniør. Det fremgår af et papir i 15. september -udgaven af Videnskab .
Hvorfor Nanobots?
"Ligesom elektromekaniske robotter sendes til fjerne steder, ligesom Mars, vi vil gerne sende molekylære robotter til små steder, hvor mennesker ikke kan gå, såsom blodbanen, "siger Qian." Vores mål var at designe og bygge en molekylær robot, der kunne udføre en sofistikeret nanomekanisk opgave:lastsortering. "
Sådan bygger du en molekylær robot
Anført af den tidligere kandidatstuderende Anupama Thubagere (PhD '17), forskerne konstruerede tre grundlæggende byggesten, der kunne bruges til at samle en DNA -robot:et "ben" med to "fødder" til at gå, en "arm" og "hånd" til afhentning af gods, og et segment, der kan genkende et specifikt drop-off-punkt og signalere til hånden om at frigive sin last. Hver af disse komponenter er lavet af blot et par nukleotider inden for en enkelt DNA -streng.
I princippet, disse modulære byggesten kunne samles på mange forskellige måder for at udføre forskellige opgaver - en DNA -robot med flere hænder og arme, for eksempel, kunne bruges til at transportere flere molekyler samtidigt.
I det arbejde, der er beskrevet i Science -papiret, Qian -gruppen byggede en robot, der kunne udforske en molekylær overflade, opfange to forskellige molekyler - et fluorescerende gult farvestof og et fluorescerende lyserødt farvestof - og derefter distribuere dem til to forskellige områder på overfladen. Brug af fluorescerende molekyler gjorde det muligt for forskerne at se, om molekylerne endte på deres tiltænkte steder. Robotten sorterede med succes seks spredte molekyler, tre lyserøde og tre gule, på deres rigtige steder på 24 timer. Tilføjelse af flere robotter til overfladen forkortede den tid, det tog at fuldføre opgaven.
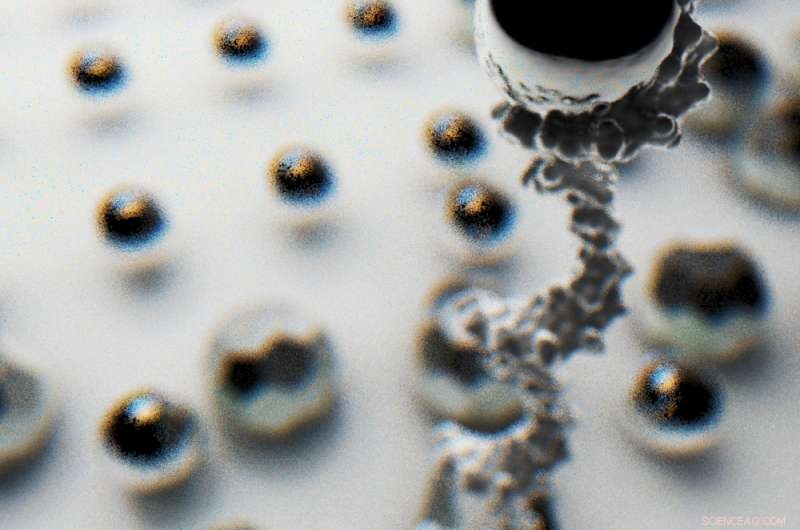
Konceptuel illustration af en DNA -robot, der sorterer to typer last. Der er taget betydelig kunstnerisk licens. Kredit:Ella Maru Studio, science-illustrations.com
"Selvom vi demonstrerede en robot til denne specifikke opgave, det samme systemdesign kan generaliseres til at arbejde med snesevis af lasttyper på ethvert vilkårligt startsted på overfladen, "siger Thubagere." Man kunne også have flere robotter til at udføre forskellige sorteringsopgaver parallelt. "
Design gennem DNA
Nøglen til at designe DNA -maskiner er, at DNA har unikke kemiske og fysiske egenskaber, der er kendte og programmerbare. En enkelt DNA -streng består af fire forskellige molekyler kaldet nukleotider - forkortet A, G, C, og T - og arrangeret i en streng kaldet en sekvens. Disse nukleotider bindes i specifikke par:A med T, og G med C. Når en enkelt streng støder på en såkaldt omvendt komplementær streng-f.eks. CGATT og AATCG - de to tråde lynes sammen i den klassiske dobbelthelix -form.
En enkelt streng, der indeholder de rigtige nukleotider, kan tvinge to delvist lynede tråde til at pakke hinanden ud. Hvor hurtigt hver lynlås- og udpakningshændelse sker, og hvor meget energi den forbruger, kan estimeres for en given DNA -sekvens, giver forskere mulighed for at kontrollere, hvor hurtigt robotten bevæger sig, og hvor meget energi den bruger til at udføre en opgave. Derudover længden af en enkelt streng eller to lynlåse tråde kan beregnes. Dermed, benet og foden på en DNA -robot kan designes til en ønsket trinstørrelse - i dette tilfælde 6 nanometer, hvilket er omkring en hundrede milliondel af et menneskes trinstørrelse.
Ved hjælp af disse kemiske og fysiske principper, forskere kan designe ikke kun robotter, men også "legepladser, "såsom molekylære tavler, at teste dem på. I det aktuelle arbejde, DNA-robotten bevæger sig rundt på et 58-nanometer-for-58-nanometer pegboard, hvor pindene er lavet af enkelte DNA-tråde, der supplerer robotens ben og fod. Robotten binder sig til en pind med benet og en af fødderne - den anden fod flyder frit. When random molecular fluctuations cause this free foot to encounter a nearby peg, it pulls the robot to the new peg and its other foot is freed. This process continues with the robot moving in a random direction at each step.
It may take a day for a robot to explore the entire board. Langs vejen, as the robot encounters cargo molecules tethered to pegs, it grabs them with its "hand" components and carries them around until it detects the signal of the drop-off point. The process is slow, but it allows for a very simple robot design that utilizes very little chemical energy.
Futuristic Applications
"We don't develop DNA robots for any specific applications. Our lab focuses on discovering the engineering principles that enable the development of general-purpose DNA robots, " says Qian. "However, it is my hope that other researchers could use these principles for exciting applications, such as using a DNA robot for synthesizing a therapeutic chemical from its constituent parts in an artificial molecular factory, delivering a drug only when a specific signal is given in bloodstreams or cells, or sorting molecular components in trash for recycling."
 Varme artikler
Varme artikler
-
 Enkelttrins grøn syntese af kompositmateriale til sårhelingSynteseproceduren for AgNPs@rGO og dens anvendelse i antibakteriel effekt. Kredit:Liu Chao Forskere fra Hefei Institutes of Physical Science (HFIPS) fra det kinesiske videnskabsakademi udviklede e
Enkelttrins grøn syntese af kompositmateriale til sårhelingSynteseproceduren for AgNPs@rGO og dens anvendelse i antibakteriel effekt. Kredit:Liu Chao Forskere fra Hefei Institutes of Physical Science (HFIPS) fra det kinesiske videnskabsakademi udviklede e -
 Forskere realiserer nanoskala-elektrometri baseret på magnetfelt-resistente spin-sensorerKredit:Pixabay/CC0 Public Domain Et team ledet af prof. Du Jiangfeng, Prof. Shi Fazhan, og prof. Wang Ya fra University of Science and Technology i Kina, fra det kinesiske videnskabsakademi, fores
Forskere realiserer nanoskala-elektrometri baseret på magnetfelt-resistente spin-sensorerKredit:Pixabay/CC0 Public Domain Et team ledet af prof. Du Jiangfeng, Prof. Shi Fazhan, og prof. Wang Ya fra University of Science and Technology i Kina, fra det kinesiske videnskabsakademi, fores -
 Grafen og diamanter viser en glat kombinationKredit:AlexanderAlUS/Wikipedia/CC BY-SA 3.0 Forskere ved det amerikanske energiministeriums Argonne National Laboratory har fundet en måde at bruge bittesmå diamanter og grafen til at give friktio
Grafen og diamanter viser en glat kombinationKredit:AlexanderAlUS/Wikipedia/CC BY-SA 3.0 Forskere ved det amerikanske energiministeriums Argonne National Laboratory har fundet en måde at bruge bittesmå diamanter og grafen til at give friktio -
 Forskere opnår atomisk tynde molybdændisulfidfilm på store substraterEn atomlagsdepositionsreaktor, der bruges til at opnå ultratynde molybdænoxidfilm, som efterfølgende blev sulfuriseret til 2D molybdændisulfid. Kredit:Atomic Layer Deposition Lab, MIPT Forskere fr
Forskere opnår atomisk tynde molybdændisulfidfilm på store substraterEn atomlagsdepositionsreaktor, der bruges til at opnå ultratynde molybdænoxidfilm, som efterfølgende blev sulfuriseret til 2D molybdændisulfid. Kredit:Atomic Layer Deposition Lab, MIPT Forskere fr
- Baby, det er koldt derinde:Opdagelsesrejsende tester udholdenhed i Polen
- Quirky respons på magnetisme præsenterer kvantefysisk mysterium
- Fra middag til bæredygtig elektronik, krabbernes overraskende alsidighed
- Mechano-responsiv hydrogel udviklet til sårheling
- Tornado rammer Luxembourg, sårede 19, skader 100 boliger
- Lad os ændre pigerne, der spiller fløjte, drenge bash trommer stereotyper