


Formkodet dynamisk samling af mobile mikromaskiner
Formkodet samling af magnetiske mikroaktuatorer i form af et mikrokøretøj. Kredit:Nature Materials, doi:10.1038/s41563-019-0407-3
Feltstyret og selvkørende kolloid samling kan bruges til at bygge mikromaskiner til at udføre komplekse bevægelser og funktioner, selvom deres integration som heterogene komponenter med specificerede strukturer, dynamik og funktioner inden for mikromaskiner er udfordrende. I en nylig undersøgelse vedr Naturmaterialer , Yunus Alapan og medarbejdere ved afdelingerne for fysisk intelligens og komplekse materialer i Tyskland og Schweiz beskrev den dynamiske selvsamling af mobile mikromaskiner med ønskede konfigurationer ved hjælp af forprogrammerede fysiske interaktioner mellem strukturelle og motoriske enheder.
De kørte samlingen ved hjælp af dielektroforetiske interaktioner (DEP) kodet i en tredimensionel form (3-D) af individuelle dele. De fulgte protokollen ved at samle de nye mikromaskiner med magnetiske og selvkørende motordele til rekonfigurerbar bevægelse og yderligere frihedsgrader, der hidtil ikke er blevet realiseret med konventionelle monolitiske mikrorobotter. Den stedselektive samlingsstrategi var alsidig og kunne demonstreres på forskellige, rekonfigurerbar, hierarkiske og tredimensionelle (3-D) mobile mikromaskiner. Forskerne forudser de designprincipper, der præsenteres i arbejdet for at fremme og inspirere udviklingen af mere sofistikerede mikromaskiner integreret i multiskala hierarkiske systemer.
Mobile mikromaskiner tilbyder et betydeligt potentiale til at sondere og manipulere den mikroskopiske verden og skabe funktionel orden/samlinger i mikro- og meso-skala. En mikromaskine kan være sammensat af flere dele, materialer eller kemi til at håndtere flere funktioner, herunder aktivering, sansning, transport og levering. Funktionelle tilstande og ydeevne af en mikromaskine kan dikteres af den kollektive organisering og interaktion mellem dens bestanddele.
For eksempel, magnetiske partikler, der interagerer under roterende magnetiske felter, kan samles i kæder eller hjul, der er i stand til at bevæge sig tæt på faste overflader. Tilsvarende forskere har udviklet lysaktiverede mikrosvømmere i levende krystaller og tilladt selvrotation ved at regulere kemikalieforbruget. For at designe højere kompleksitet, bioingeniører og materialeforskere skal tillade programmerbare fysiske interaktioner i individuelle dele til form- og materialespecifikke handlinger under ydre påvirkninger. Eksempler omfatter udviklingen af sammensatte mikrostrukturer samlet som kolloider ved hjælp af virtuelle elektriske og magnetiske forme.
Mens nye tilgange har vist lovende at bygge programmerbare strukturelle samlinger, disse mangler at blive oversat til mobile mikromaskinesamlinger. I nærværende arbejde, Alapan et al. introducerede en styret samlingsproces til at bygge mobile sammensatte mikromaskiner ved hjælp af dielektroforetiske (DEP) kræfter til at kode præcist kontrolleret fordeling af elektriske feltgradienter rundt om en krop ved at modulere dens 3-D geometri.
Resultaterne viste stedselektive og retningsbestemte mikroaktuatorer med en alsidig formkodet samlingsstrategi. De viste muligheden for forbedret styrkelse mellem aktuatorerne og kroppen ved at indstille DEP -kræfterne for at give kontrol med rotation. Alapan et al. implementeret en ny designstrategi med rettet samling for at kontrollere operationel dynamik mellem funktionelle komponenter ved hjælp af formkodede DEP-kræfter. Det eksperimentelle arbejde vil give et rigt designrum til at udvikle funktionelle mikromaskiner og mobile mikrobots til at udføre komplekse opgaver.
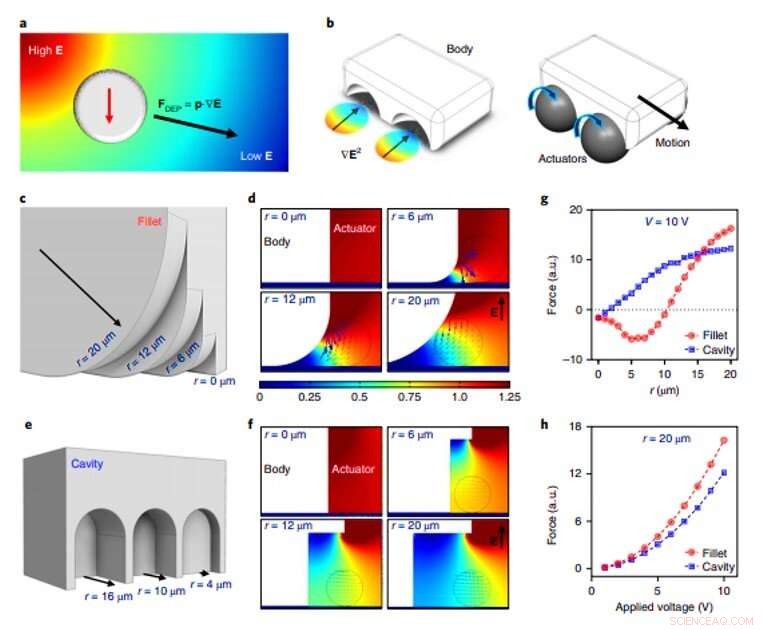
Rumlig kodning af DEP-attraktionssteder ved at modulere 3D-geometrien. (en), En negativt polariseret partikel, med en lavere relativ permittivitet end mediet (εp<εm) oplever en DEP-kraft mod de lavere feltstørrelser under et uensartet elektrisk felt. (b), DEP-kræfter kan udnyttes til den kodede samling af funktionelle komponenter ved at kontrollere lokale elektriske feltgradienter, der genereres omkring et legeme gennem dets geometri. (c–f), Forskellige 3D overfladeprofiler (filet eller hulrum) af et fast legeme ændrer den elektriske feltstyrke omkring kroppen (c, e), skabe lokale gradienter omkring overfladeprofilerne afhængigt af funktionsdimensionen, r (d, f). Pile repræsenterer elektriske feltgradienter inde i det cirkulære område, der repræsenterer en mikroaktuator (10 µm diameter), som er placeret ved punktet for maksimal kraft. Farvebjælke normaliseret elektrisk feltstyrke (E/E0)2. (g, h), Negativt polariserede mindre aktuatorer oplever en DEP-kraft mod (F> 0) eller væk (F<0) fra fordybningen på grund af feltgradienten omkring overfladeprofilen. Størrelsen og retningen af DEP-kraften afhænger af profiltypen og trækstørrelsen (g), samt den påførte spænding (h). Kredit:Nature Materials, doi:10.1038/s41563-019-0407-3
Alapan et al. først programmerede feltgradienterne omkring en konstruktion til at drive samlingen af mikromaskinedele på ønskede steder ved hjælp af DEP-interaktioner. Arbejdsprincippet for enheden under elektriske felter var baseret på den formafhængige regulering af elektriske felter omkring polariserbare legemer af den samlede mikromaskine. For at programmere de lokale gradienter, de undersøgte, hvordan ikke-elektriske felter kunne moduleres omkring forskellige geometrier.
Forskerne demonstrerede derefter kontrolleret selvsamling af mobile mikromaskiner påvirket af elektriske felter, hvor de først fokuserede på montering af et simpelt mikrokøretøj. Det eksperimentelle mikrokøretøj indeholdt et stort ikke-magnetisk dielektrisk sfærisk legeme og flere mindre magnetiske mikroaktuatorer organiseret omkring det større legeme. Når de påførte et elektrisk felt i Z-aksen, det ikke-magnetiske legeme genererede lokale elektriske feltgradienter for at tiltrække mindre mikroaktuatorer omkring dets poler. De nyligt monterede magnetiske aktuatorer fungerede som drivhjul og Alapan et al. kunne styre mikrokøretøjet ved at ændre magnetfeltets retning ved at påføre et lodret roterende magnetfelt.
Mens de øgede mikrokøretøjets hastighed ved at øge antallet af mikroaktuatorer, når spændingen i systemet steg - faldt mikrobilens hastighed i stedet. Forskerne formodede, at dette skyldtes øget mekanisk kobling mellem mikropartiklerne og substratet under DEP -interaktioner. Forskerne brugte metoden til at fange tilfældigt distribuerede, ikke-magnetiske partikler med magnetiske mikroaktuatorer ved at påføre et elektrisk felt, derefter oversat dem til en ny position ved hjælp af et roterende magnetfelt til frigivelse ved at slukke for det elektriske felt.
Montering og translation af et sammensat mikrokøretøj med magnetiske aktuatorer. Kredit:Nature Materials, doi:10.1038/s41563-019-0407-3
For at kontrollere mikrokøretøjets rotationsfrihedsgrader, Alapan et al. kunne regulere styrken af de attraktive DEP -kræfter mellem det passive legeme og mikroaktuatorer for at justere deres mekaniske kobling. For eksempel, ved lave spændinger, de små attraktive DEP-kræfter førte til et løst smøre-baseret koblingsfænomen, der tillod mikroaktuatorer at bevæge sig frit rundt om stangen. De roterende led udviklet i undersøgelsen kan blive afgørende for specifikke biologiske systemer under udviklingen af syntetiske molekylære, nano- og mikromaskiner til anvendelse i mekanisk transmission af energi.
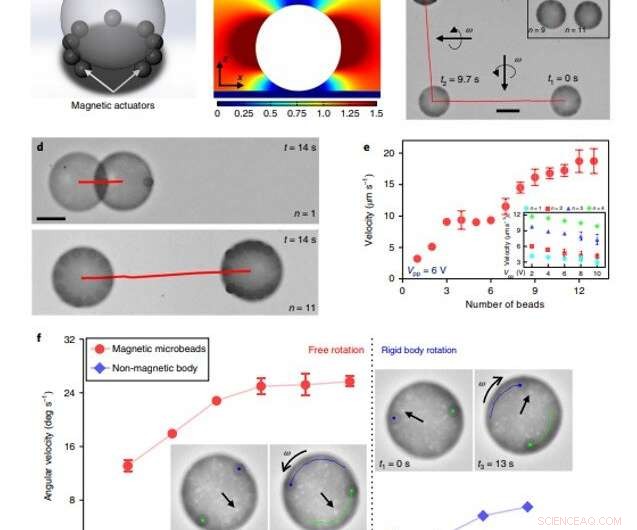
Vendbar samling af magnetiske mikroaktuatorer med et ikke-magnetisk legeme ved brug af DEP-kræfter. (en, b), Adskillige magnetiske mikropartikler (10 µm diameter) kan tiltrækkes nær et sfærisk ikke-magnetisk legeme (60 µm diameter) (a) mod områder med lavere elektrisk feltstyrke omkring polerne (b). Farvebjælke normaliseret elektrisk feltstyrke (E/E0) 2. (c), Den samlede mikrorobot oversættes via rullende bevægelse af mikroaktuatorerne under et roterende magnetfelt (ω). Mikroroboten kan styres ved at ændre den anvendte magnetfeltretning. Målestok, 50 µm. Indsat, antallet af magnetiske mikroaktuatorer (n) samlet omkring kroppen kan indstilles ved kontrolleret optagelse af mikroaktuatorer. (d, e), Antallet af magnetiske mikroaktuatorer, samt den påførte spænding (indsat), bestemme hastigheden af de samlede mikrorobotter. Målestok i d, 30 µm. (f), Når et rotationsmagnetisk felt i x-y-planet påføres, aktuatorer roterer frit omkring det ikke-magnetiske legeme ved lave spændinger. Med øget spænding, aktuatorer kobles mekanisk til det ikke-magnetiske legeme, hvilket resulterer i mikrorobottens stive kropsrotation. Fejlbjælker angiver s.d. af tre eksperimentelle replikater. Kredit:Nature Materials, doi:10.1038/s41563-019-0407-3
Forskerne realiserede derefter programmerbar selvsamling af mobile mikromaskiner med formkodede fysiske interaktioner ved at designe mikromaskinerammer med specifikke 3D-geometrier til at generere elektriske feltgradienter. 3-D-rammen tiltrak selektivt mikroaktuatorer til ønskede steder på selve mikromaskinens ramme, som forskerne fremstillede ved hjælp af to-foton-litografi. Til det første design, forskerne skabte en mikrobil med firehjulede lommer til at generere DEP-kræfter og lede samlingen af magnetiske mikroaktuatorer ind i lommerne. De udførte on-demand selvmontering af mikrobilen inden for få sekunder efter påføring af et elektrisk felt til fri rotation af magnetiske hjul inde i lommerne som følge af et lodret roterende magnetfelt. Da de tændte det elektriske felt til en høj værdi, de magnetiske mikroaktuatorer monteret selv i docking-stederne for stiv kobling mellem mikro-rotorrammen og magnetiske mikroaktuatorer. Når de påførte et vandret roterende magnetfelt, mikromotorenheden roterede som et stift legeme.
Forskerne udvidede prototypen til at bygge rekonfigurerbare mikromaskiner drevet af selvkørende mikromotorer. For det, de designede mikromaskiner samlet med selvkørende Janus silica (SiO 2 ) mikropartikler med en guldhætte (Au). Den frekvensafhængige selvfremdrift og DEP-responsen fra Janus-mikropartiklerne gjorde det muligt for dem at designe mobile mikromaskiner med rekonfigurerbar rumlig organisation og kinematik. Denne eksperimentelle opsætning demonstrerede også en form for selvreparation.

TIL HØJRE:Formkodet rekonfigurerbar samling af mikromaskiner med selvkørende mikroaktuatorer til frekvens-tunerbar bevægelse. (en), Janus SiO2 mikropartikler med en Au cap kan aktivt bevæge sig baseret på sDEP ved høje frekvenser og ICEP ved lave frekvenser. Bevægelsesretningen er mod Au cap i sDEP og vender tilbage i ICEP. (b), Janus -partiklen oplever en DEP -kraft mod højere og lavere elektriske feltstørrelser ved høje og lave frekvenser, henholdsvis. (c–e), Et mikrobilhus med halvcylindriske og fileterede samlingssteder er designet til at generere frekvensjusterbar selektiv tiltrækning af mikroaktuatorer. Janus-partiklerne tiltrækkes mod den ækvatoriale linje af halvcylindrene ved høje frekvenser og mod det fileterede sted ved lave frekvenser. Farvebjælke normaliseret elektrisk feltstyrke (E/E0)2. Fremdriften af Janus -partikler samlet på de hemicylindriske steder resulterer i rotation af mikrobilkroppen, hvorimod samling på det fileterede sted genererer lineær translation. f, g, On-demand rekonfiguration af bevægelsestilstanden opnås ved at justere frekvensen og omorganisere det rumlige layout af samlingen. Målestænger, 25 µm. VENSTRE:Hierarkisk samling af flere mikromaskiner via formkodede DEP-interaktioner. (a–c), To-trins hierarkisk samling finder sted ved samling af mikromaskineenheder 1 og 2 med selvkørende Janus-partikler (i) og ved sidemontage af enhed 1 og enhed 2 (ii). Mikromaskineenheder er designet til selektiv sidemontage, hvor undersiden af afsatser i den større enhed 2 genererer lave elektriske felter, der tiltrækker den mindre enhed 1. Farvebjælke normaliseret elektrisk feltstyrke (E/E0)2. (d, e), Parallel samling af mobile mikromaskiner opretholder den lineære bevægelse af enhederne, der henviser til, at anti-parallel samling resulterer i rotationsbevægelse. Målestænger, 25 µm. Kredit:Nature Materials, doi:10.1038/s41563-019-0407-3
Alapan et al. udvidede de observerede formkodede DEP-interaktioner til at definere fysiske interaktioner mellem de mobile mikromaskiner ved at bane vejen for hierarkiske multimaskine-samlinger. Som et principbevis, de designede en to-niveau hierarkisk samling mellem konstituerende mikromaskiner.
- På det første niveau; selvkørende aktuatorer samlet med to mikrostrukturenheder for at danne mobile mikromaskiner, der oversættes lineært
- I andet niveau; den anden enhed er samlet sideværts med enhed 1 på grund af generering af lave elektriske felter
Forskerne udvidede designet introduceret i dette arbejde til 3-D mikroaktuator manipulation og samling af mikromaskiner med betydeligt potentiale for anvendelse på lab-on-a-chip enheder for at lette kontinuerlig transport, sortering, digital manipulation af mikroobjekter og generering af mikrofluidisk flow. På denne måde Yunus Alapan og kolleger designede og implementerede programmerbar selvsamling ved hjælp af formstyret dynamisk samling af mikromaskiner fra modulære strukturelle og motoriske underenheder for at give hidtil uset kontrol over dynamik og funktioner. Metoden kan give en løsning til at konstruere multifunktionelle/materiale mikrorobotter, da det lykkedes forskerne at inkorporere de heterogene komponenter til sansning, lastning og aktivering sammen i et enkelt trin.
Til applikationer uden elektriske felter, såsom in vivo biomedicinske applikationer, forskerne vil sigte mod at optimere og bygge videre på den irreversible samling af mikrokomponenter til optimeret ydeevne. Arbejdet rummer et betydeligt potentiale for at udvikle multifunktionelle, rekonfigurerbare mikromaskiner og livsinspirerede komplekse hierarkiske systemer inden for materialevidenskab til applikationer i mikrorobotik, kolloid videnskab, medicin og autonome mikrosystemer.
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Nyt transistor koncept, solcelle inkluderetKredit:Catalan Institute of Nanoscience and Nanotechnology ICN2-forskere har udviklet et nyt koncept inden for transistorteknologi:en to-i-en strømkilde plus transistorenhed, der kører på solenerg
Nyt transistor koncept, solcelle inkluderetKredit:Catalan Institute of Nanoscience and Nanotechnology ICN2-forskere har udviklet et nyt koncept inden for transistorteknologi:en to-i-en strømkilde plus transistorenhed, der kører på solenerg -
 Løsning af en naturlig gåde med vandfiltreringDisse foldekanaler hjælper med at transportere vand, mens de blokerer for uønskede molekyler som salt. Kredit:University of Texas ved Austin/Cockrell School of Engineering. For mange ingeniører og
Løsning af en naturlig gåde med vandfiltreringDisse foldekanaler hjælper med at transportere vand, mens de blokerer for uønskede molekyler som salt. Kredit:University of Texas ved Austin/Cockrell School of Engineering. For mange ingeniører og -
 Lag på lag:Metoden lover at lave to- eller trelags grafenfilmNår forbindelser af brom eller klor (repræsenteret i blåt) indføres i en grafitblok (vist med grønt), atomerne finder vej ind i strukturen mellem hvert tredje ark, dermed øge afstanden mellem disse ar
Lag på lag:Metoden lover at lave to- eller trelags grafenfilmNår forbindelser af brom eller klor (repræsenteret i blåt) indføres i en grafitblok (vist med grønt), atomerne finder vej ind i strukturen mellem hvert tredje ark, dermed øge afstanden mellem disse ar -
 Billigere, bedre solcelle er fuld af hullerEn sølvwafer afspejler NREL-forskeren Hao-Chih Yuans ansigt, før waferen vaskes med en blanding af syrer. Syrerne ætser huller, absorberer lys og gør waferen sort. Kredit:Dennis Schroeder En ny bi
Billigere, bedre solcelle er fuld af hullerEn sølvwafer afspejler NREL-forskeren Hao-Chih Yuans ansigt, før waferen vaskes med en blanding af syrer. Syrerne ætser huller, absorberer lys og gør waferen sort. Kredit:Dennis Schroeder En ny bi
- Sådan beregnes procentdel Relativt omfang
- Vil androider drømme om kvantefår?
- Forskere tackler store udfordringer med at sende astronauter til at søge efter liv på Mars
- Pulserende nordlys:Dræberelektroner i klatrende himmellys
- Rynker giver varmen et stød i søjlegrafen
- Digitale kontra trykte publikationer:Ny undersøgelse viser, at afspilning af favoritter kan skade d…