


Succesfuld instrumentvejledning gennem dybe og krampede blodkarnetværk
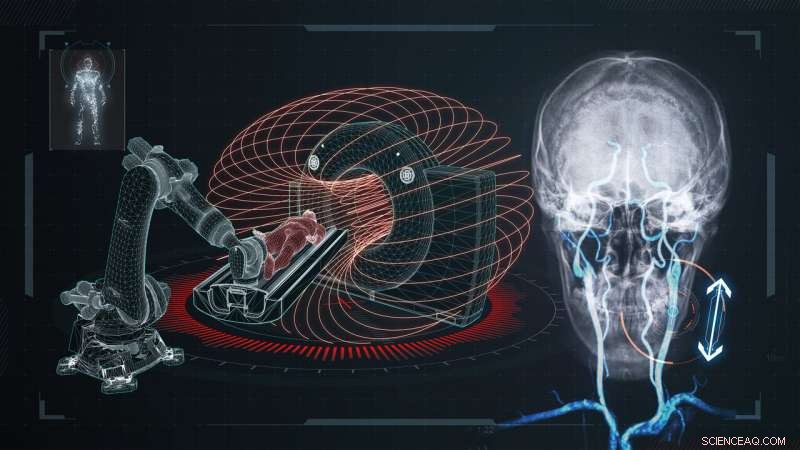
Et team ledet af professor Sylvain Martel ved Polytechnique Montréal Nanorobotics Laboratory har udviklet en ny tilgang til at tackle en af de største udfordringer ved endovaskulær kirurgi:hvordan man når de mest vanskeligt tilgængelige fysiologiske steder. Deres løsning er en robotplatform, der bruger det kantfelt, der genereres af den superledende magnet i en klinisk magnetisk resonansbilleddannelse (MRI)-scanner til at guide medicinske instrumenter gennem dybere og mere komplekse vaskulære strukturer. Tilgangen er med succes blevet demonstreret in vivo. Kredit:Massouh bioMEDia for Polytechnique Montréal Nanorobotics Laboratory
Et team ledet af professor Sylvain Martel ved Polytechnique Montréal Nanorobotics Laboratory har udviklet en ny tilgang til at tackle en af de største udfordringer ved endovaskulær kirurgi:hvordan man når de mest vanskeligt tilgængelige fysiologiske steder. Deres løsning er en robotplatform, der bruger det randfelt, der genereres af den superledende magnet fra en klinisk magnetisk resonansbilleddannelse (MRI)-scanner til at guide medicinske instrumenter gennem dybere og mere komplekse vaskulære strukturer. Fremgangsmåden er blevet demonstreret med succes in vivo , og er emnet for en artikel, der netop er offentliggjort i Videnskab robotik .
Når en forsker "tænker ud af boksen" - bogstaveligt talt
Forestil dig at skulle skubbe en tråd så tynd som et menneskehår dybere og dybere inde i en meget lang, meget smalt rør fuld af drejninger. Trådens manglende stivhed, sammen med de friktionskræfter, der udøves på rørets vægge, i sidste ende vil gøre manøvren umulig, med tråden ender foldet på sig selv og stukket i en drejning af røret. Dette er præcis den udfordring, kirurger står over for, der søger at udføre minimalt invasive procedurer i stadig dybere dele af menneskekroppen ved at styre en guidewire eller anden instrumentering (f.eks. Et kateter) gennem smalle, snoede netværk af blodkar.
Det er muligt, imidlertid, at udnytte en retningsbestemt trækkraft for at komplementere skubbekraften, modvirke friktionskræfterne inde i blodkarret og flytte instrumentet meget længere. Enhedens spids er magnetiseret, og trukket med inde i karrene af tiltrækningskraften fra en anden magnet. Kun en kraftig superledende magnet uden for patientens krop kan give den ekstra attraktion, der er nødvendig for at styre den magnetiserede enhed så langt som muligt. Der er ét stykke moderne hospitalsudstyr, der kan spille den rolle:en MR-scanner, som har en superledende magnet, der genererer et felt titusindvis af gange stærkere end Jordens.
Magnetfeltet inde i tunnelen af en MR-scanner, imidlertid, er ensartet; dette er nøglen til, hvordan patientens billeddannelse udføres. Denne ensartethed udgør et problem:at trække instrumentets spids gennem de labyrintiske vaskulære strukturer, det ledemagnetiske felt skal moduleres til størst mulig amplitude og derefter reduceres så hurtigt som muligt.
Overvejer det problem, Professor Martel havde ideen om ikke at bruge det vigtigste magnetfelt, der er til stede inde i MRI-maskintunnelen, men det såkaldte randfelt uden for maskinen. "Producenter af MR-scannere vil normalt reducere udkantsfeltet til et minimum, " forklarer han. "Resultatet er et felt med meget høj amplitude, der henfalder meget hurtigt. For os, at randfelt repræsenterer en glimrende løsning, der er langt bedre end de bedste eksisterende magnetiske vejledningstilgange, og det er i et perifert rum, der er befordrende for menneskelige indgreb. Så vidt vi ved, dette er første gang, at et MR -kantfelt er blevet brugt til en medicinsk anvendelse, " tilføjer han.
Flyt patienten i stedet for marken
For at styre et instrument dybt inde i blodkarrene, der kræves ikke kun en stærk tiltrækningskraft, men den kraft skal orienteres for at trække den magnetiske spids af instrumentet i forskellige retninger inde i karrene. På grund af MR -scannerens størrelse og vægt, det er umuligt at flytte det for at ændre magnetfeltets retning. For at komme uden om det problem, patienten flyttes i stedet for MR -maskinen. Platformen, der er udviklet af professor Martels team, bruger et robotbord, der er placeret i udkantsfeltet ved siden af scanneren.
Bordet, designet af Arash Azizi - hovedforfatteren af artiklen og en biomedicinsk ingeniør Ph.D. kandidat, hvis specialevejleder er professor Martel - kan bevæge sig på alle akser for at placere og orientere patienten i overensstemmelse med den retning, som instrumentet skal føres gennem deres krop. Tabellen ændrer automatisk retning og retning for at placere patienten optimalt i de på hinanden følgende faser af instrumentets rejse takket være et system, der kortlægger retningskræfterne i MR -scannerens magnetfelt - en teknik, som professor Martel har døbt Fringe Field Navigation (FFN).
An in vivo undersøgelse af FFN med røntgenkortlægning viste systemets kapacitet til effektiv og minimalt invasiv styring af instrumenter med ekstremt lille diameter dybt inde i komplekse vaskulære strukturer, som hidtil var utilgængelige ved hjælp af kendte metoder.
Robotter til redning af kirurger
Denne robotløsning, som i høj grad udkonkurrerer manuelle procedurer såvel som eksisterende magnetfeltbaserede platforme, muliggør endovaskulære interventionelle procedurer i meget dybe, og derfor i øjeblikket utilgængelig, områder af den menneskelige krop.
Metoden lover at udvide mulighederne for anvendelse af forskellige medicinske procedurer, herunder diagnose, billeddiagnostik og lokale behandlinger. Blandt andet, det kan tjene til at hjælpe kirurger i procedurer, der kræver mindst mulig invasive metoder, herunder behandling af hjerneskade såsom aneurisme eller slagtilfælde.
 Varme artikler
Varme artikler
-
 Forskere skaber verdens første molekylære transistorIngeniører justerede spændingen påført via guldkontakter til et benzenmolekyle, giver dem mulighed for at hæve og sænke molekylets energitilstande og demonstrere, at det kunne bruges nøjagtigt som en
Forskere skaber verdens første molekylære transistorIngeniører justerede spændingen påført via guldkontakter til et benzenmolekyle, giver dem mulighed for at hæve og sænke molekylets energitilstande og demonstrere, at det kunne bruges nøjagtigt som en -
 Ferroelektrik i nanostørrelse bliver en realitetIndersiden af vakuumkammeret, hvori processen med pulserende laseraflejring finder sted, brugt til at skabe hafniumoxidkrystallerne i denne undersøgelse. Til venstre det glødende substrat, hvorpå fi
Ferroelektrik i nanostørrelse bliver en realitetIndersiden af vakuumkammeret, hvori processen med pulserende laseraflejring finder sted, brugt til at skabe hafniumoxidkrystallerne i denne undersøgelse. Til venstre det glødende substrat, hvorpå fi -
 Nanofiber stilladser demonstrerer nye funktioner i stamceller og kræftcellerKredit:Aalto University Nye stilladser vises, så cellerne kan opføre sig på en anden, men kontrolleret måde in vitro på grund af tilstedeværelsen af justerede, selvmonterede keramiske nanofibre
Nanofiber stilladser demonstrerer nye funktioner i stamceller og kræftcellerKredit:Aalto University Nye stilladser vises, så cellerne kan opføre sig på en anden, men kontrolleret måde in vitro på grund af tilstedeværelsen af justerede, selvmonterede keramiske nanofibre -
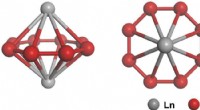 Forskning finder nye molekylære strukturer i bor-baserede nanoclustersNy forskning viser, at klynger af bor- og lanthanidatomer danner en interessant og stabil invers sandwich-struktur. Kredit:Wang Lab / Brown University Brown University forskere og samarbejdspartne
Forskning finder nye molekylære strukturer i bor-baserede nanoclustersNy forskning viser, at klynger af bor- og lanthanidatomer danner en interessant og stabil invers sandwich-struktur. Kredit:Wang Lab / Brown University Brown University forskere og samarbejdspartne
- Undersøgelse:dramatisk ulighed mellem mænd og kvinder i Houston-området
- Rock & Mineral Games for Kids
- Forskere udvikler praktisk superledende nanotråd single-foton detektor med rekorddetekteringseffekt…
- NASA fanger den tropiske cyklon Neils 1-dages liv
- Du er ikke alene om at føle dig alene
- Forskere udfører første simultan billeddannelse og spektral undersøgelse på en solar fan-rygsøj…