


Hvordan Spy Flies vil fungere
 Robotinsekter, ligesom Entomopter udviklet ved Georgia Institute of Technology, kunne give os et hidtil uset blik på vores verden. Foto høflighed GTRI/Stanley Leary
Robotinsekter, ligesom Entomopter udviklet ved Georgia Institute of Technology, kunne give os et hidtil uset blik på vores verden. Foto høflighed GTRI/Stanley Leary Vores land er i krig på et ukendt område, og en kamp er ved at begynde. Fjendtlige landtropper positionerer sig for at danne et angreb på vores hær, ligger kun 3,2 km væk. Imidlertid, fjenden ved ikke, at hver eneste bevægelse bliver overvåget af robotinsekter udstyret med små kameraer, flyver over hovedet. Disse små robotflyers, hedder mikro luftbiler (MAV'er), vil være i stand til at summe over fjendens territorium næsten ubemærket af fjendens tropper herunder. Få ville endda se to gange på disse flyvende robotter i størrelse.
Det amerikanske forsvarsministerium bruger millioner af dollars på at udvikle disse MAV'er. De er den perfekte måde at holde soldater ude af skade under rekognosceringsmissioner. I dag, indsamling af rekognoscering under kamp indebærer typisk at sætte enten små hold soldater eller store fly i fare. På samme tid, satellitbilleder er ikke umiddelbart tilgængelige for en jordsoldat.
Defense Advance Research Projects Agency (DARPA) finansierer flere forskerhold til at udvikle MAV'er, der ikke er større end 15 cm i længden, bredde og højde. Disse små fly vil være en størrelsesorden mindre end nogen anden ubemandet luftfartøj (UAV) udviklet til dato. En klasse af disse MAV'er er designet til at efterligne visse insekters flyvende bevægelser, herunder fluer, bier og guldsmede. I denne artikel, vi vil fokusere på disse fejllignende MAV'er. Du vil lære, hvordan fluer flyver, hvordan maskiner kan bygges til at efterligne deres bevægelser, og hvor disse bittesmå luftenheder vil blive indsat.
Indhold
- Lære at flyve
- Robobugs Forbered dig på flyvning
- Mikromekanisk flyvende insekt
- Flue på væggen
Lære at flyve
 En model af et mikromekanisk flyvende insekt, der sidder i en Berkeley -forskers hånd Foto høflighed Jason Spingarn-Koff
En model af et mikromekanisk flyvende insekt, der sidder i en Berkeley -forskers hånd Foto høflighed Jason Spingarn-Koff Fluer har meget at lære os om luftfart, der ikke kan læres ved at studere fastvingede fly. Årevis, der var lidt kendt om mekanikken ved insektflyvning, alligevel er de verdens ældste gruppe af flyvere, undertiden kaldes naturens kampfly . Du har måske hørt om, hvordan humlebier ikke kan flyve i henhold til konventionel aerodynamik. Det skyldes, at principperne bag insektflyvning er meget forskellige fra principperne bag flyvning med fastvinget fly.
"Ingeniører siger, at de kan bevise, at en humle ikke kan flyve, " sagde Michael Dickinson , en biolog ved University of California, Berkeley. "Og hvis du anvender teorien om fastvingede fly til insekter, du regner med, at de ikke kan flyve. Du skal bruge noget andet. "
Dickinson er en del af projektet Micromechanical Flying Insect (MFI), som udvikler små flyvende robotter ved hjælp af flyveprincipper for insekter. Projektet er i samarbejde med DARPA. MFI -projektet foreslår et robotinsekt, der er omkring 10 til 25 millimeter (0,39 til 0,98 tommer) i bredden, som er meget mindre end DARPAs størrelsesgrænse på 15 cm, og vil bruge flagrende vinger til at flyve. Projektets mål er at genskabe flyvningen af et slagflue.
Hvis du læser artiklen Sådan fungerer fly, du ved, at fly genererer løft på grund af luften, der rejser hurtigere over toppen af vingen end langs bunden af vingen. Dette kaldes steady-state aerodynamik . Det samme princip kan ikke anvendes på fluer eller bier, fordi deres vinger er i konstant bevægelse.
"I modsætning til fastvingede fly med deres stabile, næsten usynlig (uden viskositet) strømningsdynamik, insekter flyver i et hav af hvirvler, omgivet af bittesmå hvirvler og hvirvelvind, der skabes, når de bevæger deres vinger, " sagde Z. Jane Wang , en fysiker ved Cornell University's College of Engineering. En virvel er hvirvelstrøm af luft, der skabes af vingen, og luften i hvirvelen flyder i den modsatte retning af luftens hovedstrøm.
Hvirvlerne skabt af insektvinger holder insekterne højt. Dickinsons gruppe skitserer disse tre principper for at forklare, hvordan insekter får løft og forbliver i luften:
- Forsinket bod - Insektet fejer vingen fremad i en høj angrebsvinkel, skærer gennem luften i en stejlere vinkel end en typisk flyvinge. I så stejle vinkler, et fastvinget fly ville gå i stå, miste løft, og mængden af træk på vingen ville stige. En insektvinge skaber en avanceret hvirvel der sidder på overfladen af vingen for at skabe løft.
- Rotationscirkulation - I slutningen af et slagtilfælde, insektfløjen roterer bagud, skaber backspin, der løfter insektet op, ligner den måde backspin kan løfte en tennisbold.
- Vågn fangst - Når vingen bevæger sig gennem luften, det efterlader hvirvelbade eller hvirvler af luft bag sig. Når insektet roterer vingen for et returslag, det skærer i sit eget kølvandet, fanger nok energi til at holde sig selv oppe. Dickinson siger, at insekter kan få løft fra kølvandet, selv efter at vingen stopper.
"Det ville være virkelig pudsigt, hvis vi kunne udnytte disse mekanismer, også, ved at bygge en insektrobot. Men du kan ikke bygge dem nu baseret på kendte principper - du er nødt til grundlæggende at genoverveje problemet, "Sagde Dickinson. I det næste afsnit, du vil lære, hvordan forskere tager disse principper og anvender dem på skabelsen af robotflyvende insekter.
Robobugs Forbered dig på flyvning
Der er mindst to DARPA-finansierede MAV-projekter, der er inspireret af principperne for insektflyvning. Mens Michael Dickinson skaber det mikromekaniske flyvende insekt i Berkeley, Robert Michelson , en forskningsingeniør ved Georgia Institute of Technology, arbejder på Entomopter . Lad os se nærmere på begge projekter.
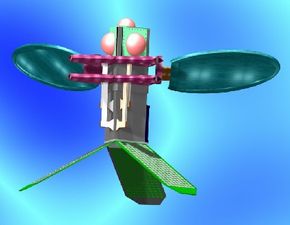
Entomopter
I juli 2000, Det amerikanske patentkontor tildelte Georgia Tech Research Corporation patent for Michelsons opfindelse af Entomopter, også kaldet a multimodalt elektromekanisk insekt . Entomopteren er designet til mulige indendørs operationer, ifølge U.S. Patent Number 6, 082, 671. Det vil efterligne et insekts kamp ved at klappe med vingerne for at generere løft. Ud over, forskere undersøger måder, hvorpå Entomopter kan navigere i gange og ventilationssystemer og kravle under døre.
Lad os se på de grundlæggende dele af Entomopter:
- Fuselage - Ligesom i større fly, dette er maskinens skrog og huser strømkilden og den primære brændstoftank. Alle andre komponenter i Entomopter er fastgjort til skroget.
- Vinger - Der er to vinger, for og bag, som er svingbart koblet til skroget i en X -konfiguration. Disse vinger er lavet af en tynd film. Stive, men fleksible årer er fastgjort til vingerne ved skrogkrydsningsfeltet for at give vingerne den kurve, de har brug for for at generere løft på både op- og nedslaget.
- Stempelkemikaliemuskel (RCM) - En kompakt, ikke -brændende motor er fastgjort til vingerne for at skabe en flappende bevægelse.
- Sensorer - Der er sensorer til at se fremad, nedad og sidelæns.
- Kamera - Prototypen mangler et minikamera, men den sidste version kunne bære et kamera eller en lugtesensor. Denne sensor registrerer lugt, og Entomopteren ville spore lugtene til deres udgangspunkt.
- Styremekanisme til overflade - Dette hjælper med navigation, når Entomopteren bruges til jordopgaver.
- Ben/fødder - Også kaldet overfladelokomotorer , disse dele giver inerti-rulletræthed og hjælpebrændstofopbevaring.
Entomopteren drives af en kemisk reaktion. Et monopropellant injiceres i kroppen, forårsager en kemisk reaktion, der frigiver en gas. Gastrykket, der opbygges, skubber et stempel i skroget. Dette stempel er forbundet med de drejeligt koblede vinger, får dem til hurtigt at klappe. Noget af gassen er opbrugt gennem ventilationsåbninger i vingen og kan bruges til at ændre liften på begge vinger, så køretøjet kan dreje. I øjeblikket, Entomopteren har et vingefang på 10 tommer (25 cm). "Det næste trin er at krympe RCM -enheden til fejlstørrelse, "sagde Michelson.
I et køretøj på størrelse med en husflue, hver del skal udføre flere opgaver. For eksempel, en radioantenne, der er fastgjort bag på køretøjet, kan også fungere som en stabilisator til navigation. Benene kunne gemme brændstof til justering af køretøjets vægt og balance under flyvningen.
Mikromekanisk flyvende insekt
 Et kunstners koncept om det færdige mikromekaniske flyvende insekt, der udvikles i Berkeley Foto høflighed R.Fears/UC-Berkeley
Et kunstners koncept om det færdige mikromekaniske flyvende insekt, der udvikles i Berkeley Foto høflighed R.Fears/UC-Berkeley Den amerikanske regering har også investeret 2,5 millioner dollars i Berkeley -projektet for at udvikle et robotinsekt på størrelse med en almindelig husflue. Det første store skridt mod at få dette mikromekanisk flyvende insekt (MFI) i luften var udviklingen af Robofly , hvilket gav forskere vigtig indsigt i mekanismerne for insektflyvning.
For at bygge MFI, forskere udførte eksperimenter for at lære, hvordan fluer flyver. Et af eksperimenterne involverede at bygge et par 10-tommer (25 cm) robotvinger, hedder Robofly , som var lavet af plexiglas og modelleret efter vingerne på en frugtflue. Vingerne blev nedsænket i en tank med mineralsk olie, som tvinger dem til at reagere som mindre, 1 millimeter lange frugtfluevinger, der slår hurtigt i luften. Seks motorer - tre på hver vinge - bevægede vingerne frem og tilbage, op og ned og i en roterende bevægelse. Sensorer blev fastgjort for at måle vingernes kraft.
Til sidst, Robofly vil blive krympet til en mikrorobotisk flue i rustfrit stål, der er 10 til 25 millimeter (0,4 til 1 tommer) i bredden og vejer cirka 43 milligram (0,002 ounces). Vingerne vil være lavet af en tynd Mylar film. Solenergi vil køre en piezoelektrisk aktuator, der vil skubbe vingerne til at klappe. Robotens thorax vil transformere piezoelektriske aktuatorbøjninger til det store vingeslag og rotation, der kræves for at opnå flyvning.
Selvom robotten endnu ikke flyver, det er blevet rapporteret, at cirka 90% af den krævede kraft til lift er blevet opnået eksperimentelt med en fuldt operationel, to-fløjs struktur. Det næste trin vil være at tilføje en flyvekontrolenhed og kommunikationsenhed til fjernbetjening. Forskerne siger, at de arbejder på at muliggøre kontrolleret svævning ved hjælp af optisk sansning og et indbygget gyroskop.
Flue på væggen
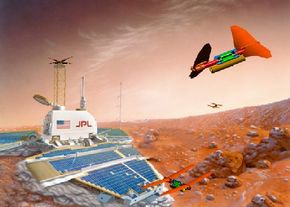 Et kunstners koncept om et team af entomoptere, der udforsker Mars Foto høflighed Robert Michelson
Et kunstners koncept om et team af entomoptere, der udforsker Mars Foto høflighed Robert Michelson I betragtning af mængden af penge, som det amerikanske militær pumper ind i MAV -projekter (micro air vehicle), det er sandsynligt, at den første brug af disse robotfejl vil være som spionfluer. DARPA forestiller sig en spionflue, der kan bruges til rekognosceringsmissioner og kontrolleres af soldater på jorden. Dette lille flyvende køretøj ville ikke kun videresende billeder af troppebevægelser, men det kan også bruges til at detektere biologiske, kemiske eller atomvåben. Derudover robotinsektet ville være i stand til at lande på et fjendtligt køretøj og placere et elektronisk mærke på det, så det lettere kunne målrettes.
I en rapport fra 1997 fra DARPA om udviklingen af MAV'er, forfatterne skrev, at fremskridt inden for mikroteknologi, inklusive mikroelektromekaniske systemer (MEMS), ville snart gøre spionfluer til en realistisk idé. Han påpegede, at mikrosystemer såsom CCD-array-kameraer, bittesmå infrarøde sensorer og chipstørrelsesdetektorer i farvestof gøres små nok til at integreres i en spionflues arkitektur.
Militæret vil gerne have en MAV, der har en rækkevidde på cirka 10 km, flyver i dag eller nat og kan forblive i luften i cirka en time. DARPA -embedsmænd siger, at den ideelle hastighed for en MAV er 22 til 45 mph (35,4 til 72,4 kph). Det ville blive styret fra en jordstation, som ville anvende retningsantenner og opretholde kontinuerlig kontakt med MAV.
Robotfluer kan også være velegnede som en ny generation af interplanetariske opdagelsesrejsende. Georgia Tech Research Institute (GTRI) har modtaget finansiering fra NASA Institute for Advanced Concepts (NIAC) til at studere ideen ved hjælp af Entomopter som en flyvende Mars -landmåler. I marts 2001, NASA finansierede den anden fase af undersøgelsen i forventning om fremtidige Mars -mikromissioner.
Entomoptere tilbyder flere fordele i forhold til større landmålere. De ville kunne lande, Afgang, svæve og udføre vanskeligere manøvrer under flyvning. Deres evne til at kravle og flyve giver dem også en fordel i at udforske andre planeter. Højst sandsynlig, NASA ville sende snesevis af disse overvågningskøretøjer til at udforske andre planeter. Entomopter -udvikleren Rob Michelson sagde, at Mars -versionen af Entomopter skulle have en størrelse på et vingefang på cirka 1 meter for at flyve i Mars tynde atmosfære.
Forskere siger, at disse små flyvende robotter også ville være værdifulde i kølvandet på naturkatastrofer, såsom jordskælv, tornadoer eller jordskred. Deres lille størrelse og evne til at flyve og svæve gør dem nyttige til at søge efter mennesker begravet i murbrokker. De kunne flyve mellem sprækker, som mennesker og større maskiner ikke er i stand til at navigere i. Andre anvendelser omfatter trafikovervågning, grænseovervågning, undersøgelser af dyreliv, inspektion af elledninger og luftfotografering i fast ejendom.
Spionfluer er endnu et eksempel på, hvordan teknologi hjælper mennesker med at udføre farlige opgaver, tillader mennesker at holde sig ude af skade. Militær rekognoscering, at søge efter ofre for jordskælv og rejse til andre verdener er alle farlige aktiviteter - flyvende mikrorobotter ville give os mulighed for at udføre disse opgaver uden egentlig at være der.
Masser mere information
Relaterede HowStuffWorks -links
- Sådan fungerer et amerikansk spionfly
- Sådan fungerer fly
- Hvordan Exoskeletons vil fungere
- Hvordan militære smertebjælker vil fungere
Flere store links
- Micro Air Vehicles - Mod en ny dimension under flyvning
- UC Berkeley Robotics and Intelligent Machines Laboratory
- Mikromekanisk flyvende insekt (MFI) projekt
- "Robofly" løser mysteriet om insektflyvning
- Kablet:Se, Up in the Sky:Robofly
- Populær mekanik:Micro Warfare
- Flyver ind i fremtiden
- Fly-O-Rama
- MLB Company:The Trochoid
- Flapping Wing Propulsion
- Athena Technologies flyver mikroluftkøretøj
- Aerodynamik af insektflyvning:Ansøgninger til mikrolufttøjer
- Termoelektrisk baserede mikroluftkøretøjer
Sidste artikelSådan fungerer V-22 Osprey
Næste artikelSådan fungerer militær camouflage
 Varme artikler
Varme artikler
-
 Betydningen af regnvandRegnvand, også kaldet nedbør, er et naturligt træk i jordens vejrsystem. Luftstrømme i atmosfæren bringer fordampet vand fra havet og jordoverfladen op til himlen. Den fordampede væske kondenseres
Betydningen af regnvandRegnvand, også kaldet nedbør, er et naturligt træk i jordens vejrsystem. Luftstrømme i atmosfæren bringer fordampet vand fra havet og jordoverfladen op til himlen. Den fordampede væske kondenseres -
 Sådan konverteres KW til HP til klimaanlægKilowatt (kW) og hestekræfter (hk) er begge målinger af magt, og at konvertere den ene til den anden er et spørgsmål om at multiplicere med en konverteringsfaktor. Én hestekræfter er lig med 0,7457 kW
Sådan konverteres KW til HP til klimaanlægKilowatt (kW) og hestekræfter (hk) er begge målinger af magt, og at konvertere den ene til den anden er et spørgsmål om at multiplicere med en konverteringsfaktor. Én hestekræfter er lig med 0,7457 kW -
 Alt hvad du behøver at vide om orkanen DorianDen østlige kyst af De Forenede Stater støtter Dorian efter den langsomt bevægende storm pummel Bahamas, hvilket resulterede i katastrofale skader, nådeløs oversvømmelse, kvæstelser og mindst syv d
Alt hvad du behøver at vide om orkanen DorianDen østlige kyst af De Forenede Stater støtter Dorian efter den langsomt bevægende storm pummel Bahamas, hvilket resulterede i katastrofale skader, nådeløs oversvømmelse, kvæstelser og mindst syv d -
 Bigfoot har en FBI-fil - og dens underligeTro det eller ej, FBI undersøgte engang Bigfoot - og tidligere denne måned, mere end 40 år efter den nævnte undersøgelse, frigav bureauet sine resultater. Femten hår , der er knyttet til et lille st
Bigfoot har en FBI-fil - og dens underligeTro det eller ej, FBI undersøgte engang Bigfoot - og tidligere denne måned, mere end 40 år efter den nævnte undersøgelse, frigav bureauet sine resultater. Femten hår , der er knyttet til et lille st