


Nye lokaliserings- og kortlægningsværktøjer i realtid til robotik, VR, og AR
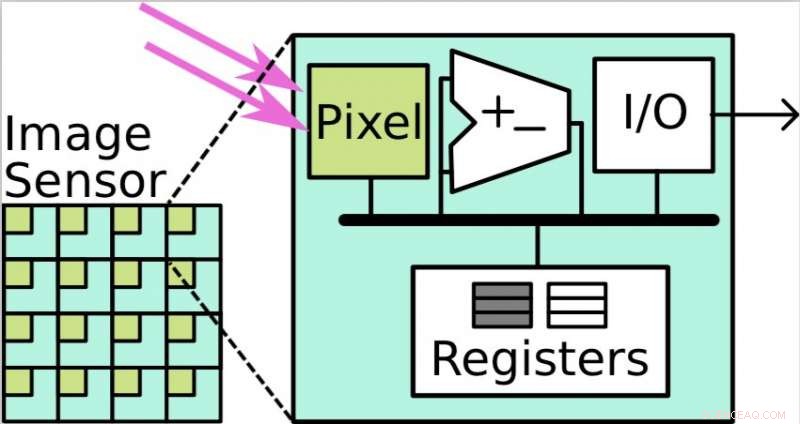
Focal-plane Sensor-Processor Arrays (FPSP'er) er parallelle behandlingssystemer, hvor hver pixel har et behandlingselement. Kredit:Saeedi et al.
En stor gruppe forskere ved Imperial College London, universitetet i Edinburgh, University of Manchester, og Stanford University har for nylig samarbejdet om et projekt, der undersøger anvendelsen af lokalisering og kortlægningsværktøjer i realtid til robotteknologi, autonome køretøjer, virtual reality (VR) og augmented reality (AR). Deres papir, udgivet på arXiv og Procedurer for IEEE , skitserer udviklingen af metoder til evaluering af samtidige lokaliserings- og kortlægningsalgoritmer (SLAM), samt en række andre interessante værktøjer.
"Målet med vores arbejde var at bringe ekspertforskere fra edb -vision, hardware og kompilatorsamfund sammen for at bygge fremtidige systemer til robotik, VR/AR, og tingenes internet (IoT), "fortalte forskerne til Tech Xplore i en e -mail." Vi ønskede at bygge robuste computersynsystemer, der er i stand til at opfatte verden med et meget lavt strømbudget, men med ønsket nøjagtighed; vi er interesseret i opfattelsen pr. Joule -metrisk. "
Forskerne involveret i projektet kombinerede deres færdigheder og ekspertise til at samle algoritmer, arkitekturer, værktøjer, og software nødvendig for at levere SLAM. Deres fund kan hjælpe dem, der anvender SLAM på en række forskellige områder til at vælge og konfigurere algoritmer og hardware, der kan opnå optimale ydelsesniveauer, nøjagtighed, og energiforbrug.
"Et vigtigt punkt i projektet er ideen om tværfaglig forskning:At bringe eksperter fra forskellige felter sammen kan muliggøre fund, der ellers ikke ville være muligt, "sagde forskerne.
SLAM -algoritmer er metoder, der kan konstruere eller opdatere et kort over et ukendt miljø og samtidig holde styr på en bestemt agents placering inden for det. Denne teknologi kan have nyttige applikationer på en række områder, for eksempel i udviklingen af autonome køretøjer, robotik, VR, og AR.
I deres undersøgelse, forskerne udviklede og evaluerede flere værktøjer, herunder compiler- og runtime -softwaresystemer, samt hardwarearkitekturer og computervisionalgoritmer til SLAM. For eksempel, de udviklede benchmarking -værktøjer, der tillod dem at vælge et korrekt datasæt og bruge det til at evaluere SLAM -algoritmer.
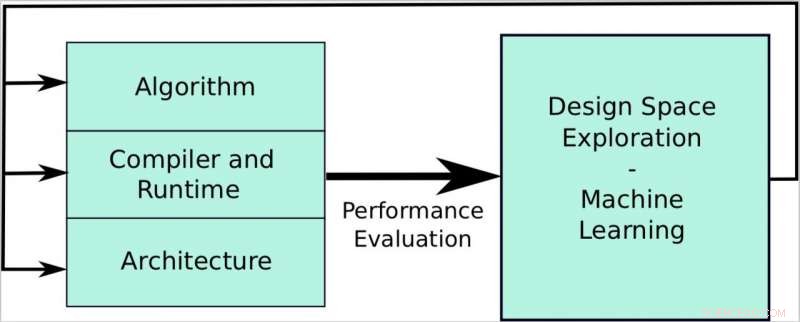
Formålet med papiret er at oprette en pipeline, der tilpasser krav til computersyn med hardwarefunktioner. Papirets fokus er på tre lag:algoritmer, compiler og runtime, og arkitektur. Målet er at udvikle et system, der giver os mulighed for at opnå strøm og energieffektivitet, forbedring af hastighed og driftstid, og nøjagtighed/robusthed i hvert lag og også holistisk gennem design af rumforskning og teknikker til maskinlæring. Kredit:Saeedi et al.
For eksempel, de brugte en applikation kaldet SLAMBench til at evaluere KinectFusion -algoritmen på flere hardwareplatforme og SLAMBench2 til at sammenligne forskellige SLAM -algoritmer. Forskerne udvidede også KinectFusion -algoritmen, så den kan bruges i robotstiplanlægnings- og navigationsalgoritmer; kortlægning af både besat og ledig plads i miljøet.
"Dette projekt var virkelig bredt, dermed, fund var ret mange, "sagde forskerne." F.eks. vi har vist praktiske anvendelser, hvor omtrentlige computere kan spille en stærk rolle i at opnå opfattelse pr. Joule, for eksempel SLAMBench-applikationen udviklet til smart-telefoner. Omtrentlig computing er ideen om at fuldføre en beregningsopgave med en given acceptabel fejl, og så frembring en omtrentlig løsning. "
Projektet undersøgte brugen af nye sanseteknologier, såsom focal-plane sensor-processor arrays, som viste sig at have et lavt strømforbrug og høje billedhastigheder. Ud over, den undersøgte anvendelsen af statisk, dynamisk, og metoder til planlægning af hybride programmer på multicore -systemer, især for KinectFusion -algoritmen.
"Vores forskning har allerede indflydelse på mange områder som f.eks. VR/AR, og IoT, hvor maskiner altid er tændt og er i stand til at kommunikere og udføre deres opgaver med rimelig nøjagtighed, uden afbrydelser, ved meget lavt strømforbrug, "sagde forskerne.
Dette omfattende projekt har ført til flere vigtige fund, og til udvikling af nye værktøjer, der i høj grad kunne lette implementeringen af SLAM inden for robotik, VR, AR, og autonome køretøjer.
Undersøgelsen gav også en række bidrag i forbindelse med hardware design, for eksempel, udvikling af profilværktøjer til at lokalisere og evaluere flaskehalse for ydelser i både native og administrerede applikationer. Forskerne præsenterede en fuld arbejdsgang til oprettelse af hardware til computer vision applikationer, som kunne anvendes på fremtidige platforme.
"Vi vil nu bruge vores fund til at bygge et integreret system til robotik og VR/AR, "sagde forskerne." F.eks. Dr. Luigi Nardi ved Stanford University fortsætter sin forskning ved at anvende lignende koncepter på Deep Neural Networks (DNN), dvs. optimering af hardware og software til at køre DNN effektivt, mens Dr. Sajad Saeedi ved Imperial College London ser på alternative analoge teknologier såsom focal-plane sensor-processor arrays (FPSP'er), der tillader DNN at køre med meget høje billedhastigheder, rækkefølge på 1000s FPS, for altid tændte enheder og autonome biler. "
© 2018 Tech Xplore
Sidste artikelAlt-i-et lysdrevet vandopdeling
Næste artikelTeslas topbogholder forlader efter en måned på jobbet
 Varme artikler
Varme artikler
-
 Højteknologisk mangel tårner sig op, da nedlukninger af coronavirus rammer producenterKredit:CC0 Public Domain Der er nu mere end 45, 000 bekræftede tilfælde af coronavirus kaldet COVID-19 af Verdenssundhedsorganisationen, og sygdommen har forårsaget mindst 1, 115 døde. Virkningen
Højteknologisk mangel tårner sig op, da nedlukninger af coronavirus rammer producenterKredit:CC0 Public Domain Der er nu mere end 45, 000 bekræftede tilfælde af coronavirus kaldet COVID-19 af Verdenssundhedsorganisationen, og sygdommen har forårsaget mindst 1, 115 døde. Virkningen -
 Firefox afslører større sikkerhedsopgradering:DoH-protokollen øger brugernes privatlivKredit:CC0 Public Domain Som et vigtigt skridt for at begrænse aflyttere i at benytte sig af brugernes web-browsing-vaner, Mozilla lancerede i dag et stort sikkerhedsinitiativ for alle Firefox-bru
Firefox afslører større sikkerhedsopgradering:DoH-protokollen øger brugernes privatlivKredit:CC0 Public Domain Som et vigtigt skridt for at begrænse aflyttere i at benytte sig af brugernes web-browsing-vaner, Mozilla lancerede i dag et stort sikkerhedsinitiativ for alle Firefox-bru -
 Privatlivsrettigheder kan blive det næste offer for en morderpandemiCoronavirus-pandemien har ført til oprettelsen af apps og sporingssystemer, der bruger folks smartphone-placering som en del af bestræbelserne på at begrænse smitte Digital overvågning og smartp
Privatlivsrettigheder kan blive det næste offer for en morderpandemiCoronavirus-pandemien har ført til oprettelsen af apps og sporingssystemer, der bruger folks smartphone-placering som en del af bestræbelserne på at begrænse smitte Digital overvågning og smartp -
 Google udråber kvantecomputer-milepælDenne fredag, 16. juni, 2017, filbillede viser Google-logoet ved en gadget-udstilling i Paris. Google sagde, at det har opnået et gennembrud inden for kvantecomputerforskning, siger, at dens kvantepro
Google udråber kvantecomputer-milepælDenne fredag, 16. juni, 2017, filbillede viser Google-logoet ved en gadget-udstilling i Paris. Google sagde, at det har opnået et gennembrud inden for kvantecomputerforskning, siger, at dens kvantepro
- Uber viser en stor stigning i regeringens anmodninger om rytteroplysninger
- Evaluering af drivhusgasemissioner i et kunstvandet afgrødesystem
- Kunstige molekyler:Forskere udforsker nye metoder til samling af kvanteprikker
- Fordele og ulemper ved solfilm til hjemmet Windows
- Undersøgelse:Arbejdsgivere bør vedtage fjernarbejdspolitikker for at målrette personaleaktivitet,…
- En løbsk stjerne i den lille magellanske sky