


Selvkørende køretøjer i mikroskala
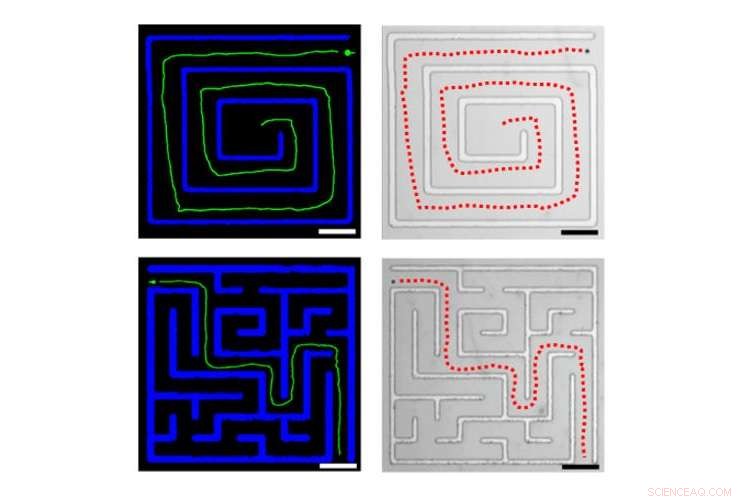
Baner af et mikrokøretøj gennem labyrinter. Stien er planlagt af et kunstig intelligenssystem, og mikrobilen styres af magnetiske felter. Kredit:Li et al. ©2017 American Chemical Society
(Phys.org) – I en ny undersøgelse, forskere har udviklet mikroskalaversionen af selvkørende køretøjer:en 5-μm sfærisk mikromotor, der autonomt navigerer sig vej gennem mikrotrafik langs en mikrolabyrint for at nå sin endelige destination. Forskerne forventer, at disse "smarte mikrokøretøjer" har potentielle anvendelser i biomedicinske opgaver, såsom levering af lægemidler til tumorceller, mens man undgår raske celler.
Forskerne, ledet af Longqiu Li ved Harbin Institute of Technology i Kina, og Joseph Wang ved University of California San Diego i USA, har udgivet et papir om de smarte mikrokøretøjer i et nyligt nummer af ACS Nano .
"Vi har indlejret kunstig intelligens i en mikro/nanorobot, " fortalte Li Phys.org . "Vi introducerer et smart mikrokøretøj til præcis autonom navigation i komplicerede og dynamisk skiftende miljøer gennem optimal stiplanlægning. I lighed med deres store køretøjer, den autonome navigation af mikrokøretøjer medfører kollisionsfri bevægelse i dynamiske miljøer."
Indtil nu, mikro- og nanomaskiner er blevet begrænset til navigation, der bruger et lukket sløjfe-kontrolsystem, hvor maskinerne kun kan bevæge sig langs en foruddefineret bane. Den nye undersøgelse markerer den første demonstration af mikromaskiner, der autonomt kan navigere komplekse, dynamisk skiftende miljøer, som dem med andre bevægelige mikromaskiner.
Den autonome navigationsproces består af tre hovedtrin. Et CCD-kamera, der er tilsluttet et mikroskop, tager billeder og sender dem til en ekstraktionsprocessor, som identificerer forhindringer og konstruerer et kort over miljøet. Kortet sendes derefter som input til en Artificial Intelligence (AI) planlægger, som bruger en stisøgningsalgoritme og fuzzy logic tilgang til at bestemme den korteste kollisionsfri vej blandt flere mulige stier til destinationen. AI-planlæggeren sender derefter disse rejsevejledninger til en magnetfeltgenerator, som orienterer et magnetfelt på en sådan måde, at det styrer mikrobilen langs den kollisionsfrie vej.
AI-planlæggeren, som er kernen i det smarte navigationssystem, kan også registrere, når mikrobilen driver fra sin planlagte vej, som kan opstå på grund af tilstedeværelsen af støj. I disse tilfælde, AI-planlæggeren kan samtidig måle fejlen og guide mikrobilen tilbage på stien.
En af de vigtigste anvendelser af denne type smarte mikrokøretøjer kan være inden for det biomedicinske område til opgaver som sygdomsdiagnostik, medicin levering, og præcisionskirurgi. At demonstrere, forskerne viste, at mikrobilen kan bruge kameraet til at mærke og skelne mellem kræftceller, røde blodlegemer, og blandede celler, ved at genkende forskelle i deres størrelse og form. AI-planlæggeren betragter derefter kræftcellerne som målene og de andre celler som forhindringerne, og planlægger en vej i overensstemmelse hermed.
"Vi ønsker at anvende mikro/nanorobotsystemer inden for biomedicinske operationer og manipulation i nanoskala, " sagde Li.
I fremtiden, forskerne planlægger at udvikle mere sofistikerede autonome mikrokøretøjer, med funktioner som autonom bremsning, "fartpilot, vognbanehold, og evnen til at interagere med omgivelserne.
© 2017 Phys.org
 Varme artikler
Varme artikler
-
 Ny kvantesensor kan forbedre kræftbehandlingenKonisk nanowire array enhed design. Kredit: Natur nanoteknologi (2019). DOI:10.1038/s41565-019-0393-2 En ny kvantesensor udviklet af forskere ved University of Waterloos Institute for Quantum Com
Ny kvantesensor kan forbedre kræftbehandlingenKonisk nanowire array enhed design. Kredit: Natur nanoteknologi (2019). DOI:10.1038/s41565-019-0393-2 En ny kvantesensor udviklet af forskere ved University of Waterloos Institute for Quantum Com -
 Verdens mest komplekse mikropartikel:Et syntetisk materiale, der overgår naturens forviklinger (Opd…Lavet af buede guld-cystein nanoplader, der alle snoer sig i samme retning, den spidse nanopartikel opnåede den højeste målte kompleksitet. Det absorberer UV-lys og udsender snoet lys i den synlige de
Verdens mest komplekse mikropartikel:Et syntetisk materiale, der overgår naturens forviklinger (Opd…Lavet af buede guld-cystein nanoplader, der alle snoer sig i samme retning, den spidse nanopartikel opnåede den højeste målte kompleksitet. Det absorberer UV-lys og udsender snoet lys i den synlige de -
 Overlegen støjkontrol ved hjælp af grafenKredit:University of Adelaide Støj er en farlig verdensomspændende miljøforurening:ved normale niveauer fundet i byer kan det fremkalde gener, stress og udsving i søvnmønstre, som igen øger risiko
Overlegen støjkontrol ved hjælp af grafenKredit:University of Adelaide Støj er en farlig verdensomspændende miljøforurening:ved normale niveauer fundet i byer kan det fremkalde gener, stress og udsving i søvnmønstre, som igen øger risiko -
 Ny metode udviklet til at forbedre holdbarheden af nano-elektroniske komponenter, yderligere halvl…Kredit:CC0 Public Domain Forskere fra University of South Florida udviklede for nylig en ny tilgang til at afbøde elektromigration i elektroniske forbindelser på nanoskala, der er allestedsnærvære
Ny metode udviklet til at forbedre holdbarheden af nano-elektroniske komponenter, yderligere halvl…Kredit:CC0 Public Domain Forskere fra University of South Florida udviklede for nylig en ny tilgang til at afbøde elektromigration i elektroniske forbindelser på nanoskala, der er allestedsnærvære
- Hvad i alverden kunne leve i en saltvandssø på Mars? En ekspert forklarer
- Bioraffinaderier vil kun have minimale virkninger på markederne for træprodukter og råvarer
- Modellering af en model nanopartikel
- I en tid med robotter, pædagoger skal investere i følelsesmæssigt arbejde
- En stigning i online dagligvareindkøb medfører et jobskifte mellem mængde og kvalitet
- Atlanterhavet kan få en kickstart fra den anden side af kloden